

Содержание
Составление структурной схемы объекта управления 2
Определение передаточной функции объекта управления 4
Построение логарифмических и переходной характеристик объекта 5
Составление уравнения состояния непрерывного объекта 7
Определение периода квантования управляющей ЦВМ 7
Составление уравнений состояния дискретной модели объекта 8
Расчет параметров цифрового регулятора состояния, обеспечивающего торможение двигателя за минимальное число тактов квантования 10
Расчет параметров оптимального быстродействия наблюдателя состояния и составление его структурной схемы 10
Запись уравнений состояния замкнутой цифровой системы и составление её структурной схемы 11
Расчет и построение графиков сигналов в цифровой системе с наблюдателем и регулятором состояния 14
Приложение 1 17
Приложение 2 18
Приложение 3 19
Литература 20
Составление структурной схемы объекта управления
Исходные данные:
|
Номер варианта |
11 |
|
Модель |
ДПМ-07 |
|
Мощность, Вт |
|
|
Напряжение, В |
27 |
|
Ток, А |
0.05 |
|
Скорость вращения, об/мин |
6000 |
|
Вращающий момент, Нсм |
0.2 |
|
Момент инерции, кг/см2 |
0.0025 |
|
Сопротивление, Ом |
84 |
|
Индуктивность, Гн |
|
Объект управления – электрический привод с двигателем постоянного тока, описываемый уравнениями:
-
уравнение электрической цепи двигателя
![]() ;
;
-
уравнение моментов
![]() ;
;
-
уравнение редуктора
![]() ;
;
где: u – напряжение на якоре двигателя [В];
i – ток якоря [А];
![]() - э.д.с. вращения [В];
- э.д.с. вращения [В];
![]() – момент, развиваемый двигателем [Нм];
– момент, развиваемый двигателем [Нм];
f – угол поворота вала двигателя [рад];
y – угол поворота вала редуктора (выход) [рад];
![]() –угловая скорость
[1/с];
–угловая скорость
[1/с];
Kp=1 – коэффициент передачи редуктора;
R, L - сопротивление и индуктивность якоря [Ом], [Гн];
K1, K2 – конструктивные параметры двигателя [Вс/рад], [Нм/А].
Управляющий сигнал – напряжение на якоре двигателя – u; выход объекта управления – y, измеряемый сигнал – y.
Рассчитаем значения ωн и L:
![]() с-1;
с-1;
![]() Гн.
Гн.
Рассчитаем коэффициенты K1 и K2:
![]() (Нм/А);
(Нм/А);
![]() (Вс/рад).
(Вс/рад).
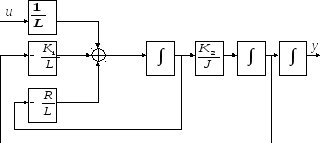
Для составления структурной схемы объекта управления, напишем систему уравнений, которая получается из исходных данных.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
в итоге получаем следующую систему:

![]()
![]()
![]()
Структурная схема объекта управления:
Система дифференциальных уравнений в форме Коши:
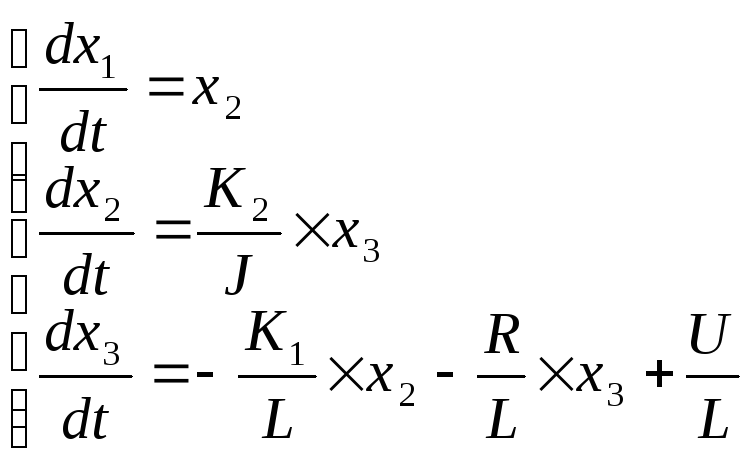
где:

Определение передаточной функции объекта управления
В данном разделе мы определяем передаточную функцию, считая выходным сигналом угловую скорость ω.
Вернемся к основному уравнению:
![]() ,
,
подстановкой исходных данных приведем ее к удобному для нас виду:
![]() ,
,
![]() .
.
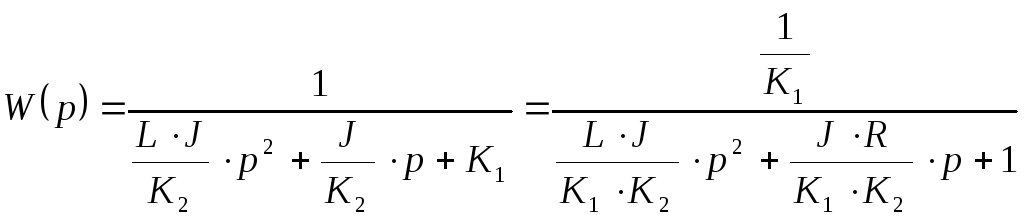
Для нахождения передаточной функции вспомним ее определение. Передаточной функцией звена или системы называется отношение изображения выходного сигнала к изображению входного сигнала при нулевых начальных условиях. Передаточная функция представляет собой дробь, числитель которой является результатом замены производных степенями p правой части дифференциального уравнения, а знаменатель – левой.
Передаточная функция:
![]() .
.
Перейдем к изображениям
![]()
после подстановки:
 ;
;
найдем J:
![]() м.
м.
Итак, получаем
![]()
![]() .
.
если представить в стандартном виде, то получим:
![]()
где:
![]() с;
с;
![]() ;
;
![]()