Адаптивные системы предельного управления
Такие системы обеспечивают постоянные значения заданных параметров процесса резания при действии различных возмущений. Один из вариантов такой системы изображен на рис.1.
На рисунке обозначено: СЧПУ – система числового программного управления; ИМ – исполнительный механизм; Р – регулирующий орган; ОР – объект регулирования; ДОС – датчик обратной связи; ПО – процесс обработки; Д – датчики; БВ – блок вычислений; РУ – регулирующее устройство; ПЗ – предельные значения; S – подача; V – скорость резания.
В качестве величин, характеризующих процесс резания, могут быть: мощность, потребляемая электродвигателем; усилие резания; вращающий момент шпинделя; ток в якоре электродвигателя, давление в подводящих магистралях гидродвигателя; величина отжима инструментальной головки и др.
Для упрощения систем управления в адаптивных системах этого типа чаще всего используется регулирование только величины подачи S.
К измерительным преобразователям, измеряющих параметры резания, предъявляются требования высокой точности, чувствительности, быстродействия, долговечности, небольших габаритов.

Рис. 1. Функциональная схема адаптивной системы предельного управления
Для увеличения точности измерения измерительные преобразователи необходимо располагать как можно ближе к зоне резания. Однако это ведет к снижению жесткости инструмента или приспособления, нагреву преобразователя, выделяемым при резании теплом. Кроме того, на датчик воздействуют: охлаждающая жидкость, стружка, вибрации в зоне обработки и другие факторы.
Системы управления с использованием управляющей ЭВМ.
Структурные схемы систем управления с микроЭвм
При создании систем автоматического управления принципиально возможно идти по двум направлениям.

Рис. 14. 1. Структурная схема системы управления с центральной управляющей микроЭВМ
Первое из них связано с использованием центральных управляющих микроЭВМ. Подобные системы могут применяться для управления сложными объектами (самолетами, ракетами, прокатными станами, доменными печами и т.п.) или группами объектов при комплексной автоматизации в различных отраслях промышленности и сельского хозяйства (металлургической, химической, нефтеперерабатывающей, в тепличном овощеводстве, животноводстве и т.д.).
Общая структурная схема автоматической системы с микроЭВМ для этого случая показана на рис.14.1. Система содержит ряд входных ВхП1, ВхП2,. .. , ВхПк и выходных ВыхП1, ВыхП2,..., ВыхПк преобразователей, обменивающихся сигналами управления с микроЭВМ в процессе преобразования данных по шине управления. Сигналы с выходных преобразователей поступают на исполнительные устройства, воздействующие на объект (или объекты) управления.
Такая система может быть связанной многомерной, если осуществляется управление сложным, многомерным объектом, и несвязанной многомерной, если осуществляется управление группой несвязанных одномерных объектов. В последнем случае САУ с микроЭВМ распадается на совокупность одномерных, систем; ее виртуальная (кажущаяся) структура представляется в виде совокупности одноконтурных систем автоматического управления (рис.14.2), каждая из которых имеет свою программу управления ПУ1, ПУ2…ПУк.
При управлении сложным объектом или группой объектов процессор обслуживает по очереди отдельные каналы управления.
Эта очередь может осуществляться по жесткой программе или по мере поступления заявок от отдельных каналов с возможностью использования в последнем случае приоритетного обслуживания.
Второе направление, по которому развиваются в наст. время САУ с микроЭВМ, — это использование в каждом контуре управления автономной микроЭВМ, называемой часто микроконтроллером. Структурная схема САУ с автономными микроЭВМ MKl, МК2….МKк показана на рис.14.3

Рис. 14.2. Виртуальная структура САУ с центральной микроЭВМ
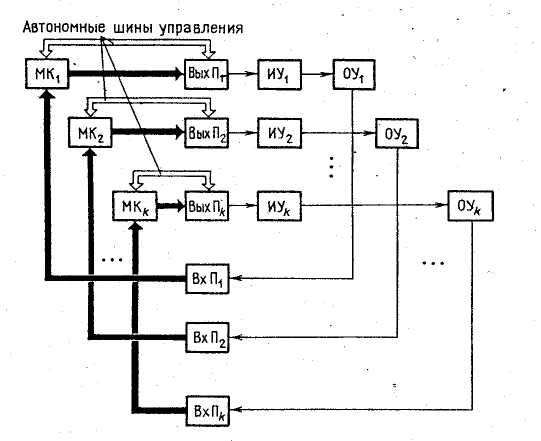
Рис. 14.3. Схема системы с автономными управляющими микроЭВМ
Микроконтроллеры представляют собой упрощенные варианты микроЭВМ, размещаемых в непосредственной близости от управляемого объекта. В микроконтроллерных системах центральная ЭВМ либо отсутствует совсем, либо вводится для передачи ей функций диспетчера или супервизора.
Выбор одного из двух направлений построения САУ с микроЭВМ связан, в частности, с проблемами надежности и стоимости. Стоимость систем, использующих центральную управляющую микроЭВМ, обычно при большом числе управляемых объектов ниже стоимости микроконтроллерных систем. Эта закономерность, впрочем, с развитием технологии производства микропроцессоров, приведшей к созданию высокоэффективных однокристальных микроЭВМ, проявляется все в меньшей степени. Кроме того, системы на базе центральных управляющих микроЭВМ являются технологически менее надежными. Они нуждаются в дорогостоящих, помехоустойчивых линиях связи. Поэтому принцип децентрализованного (микроконтроллерного) управления в микропроцессорных системах постепенно становится превалирующим.
Для увеличения надежности, производительности и гибкости микроЭВМ в системах автоматического управления применяют многопроцессорные системы и системы на базе многих микроЭВМ — многомашинные системы.
Первый класс структур цифровых САУ характеризуется тем, что большое число микропроцессоров работает на одну общую шину (рис.14.4). Организация параллельной работы нескольких микропроцессоров позволяет реализовать один из следующих режимов: 1) одновременное выполнение нескольких команд программы; 2) одновременное выполнение нескольких программ или подпрограмм. В первом режиме каждый процессор выполняет команды определенного класса, например, логические команды, арифметические команды, команды по определению адресов и др. Во втором режиме каждый процессор имеет возможность работать с полным списком команд. Оба режима позволяют увеличить производительность управляющих микроЭВМ.
ПРИЛОЖЕНИЕ 1
ПРИЛОЖЕНИЕ 2
ПРИЛОЖЕНИЕ 3

ПРИЛОЖЕНИЕ 4


ПРИЛОЖЕНИЕ 5