

Показатели качества переходной характеристики
Среди возможных режимов САР важное значение имеет переходный процесс, возникающий при быстром (в пределе мгновенном) изменении задающего воздействия или возмущения от одного значения до другого. Чем с большей скоростью и плавностью протекает такой процесс, тем меньше продолжительность и величина рассогласования.
Поэтому одной из оценок качества регулирования (прямой оценкой) служит оценка качества переходной характеристики САР относительно задающего воздействия. При этом имеется в виду, что чем лучше переходная характеристика, тем лучше система будет отрабатывать произвольное задающее воздействие.
Переходные характеристики (рис. 8.2) бывают колебательными (кривая 2) и монотонными (кривая 1).
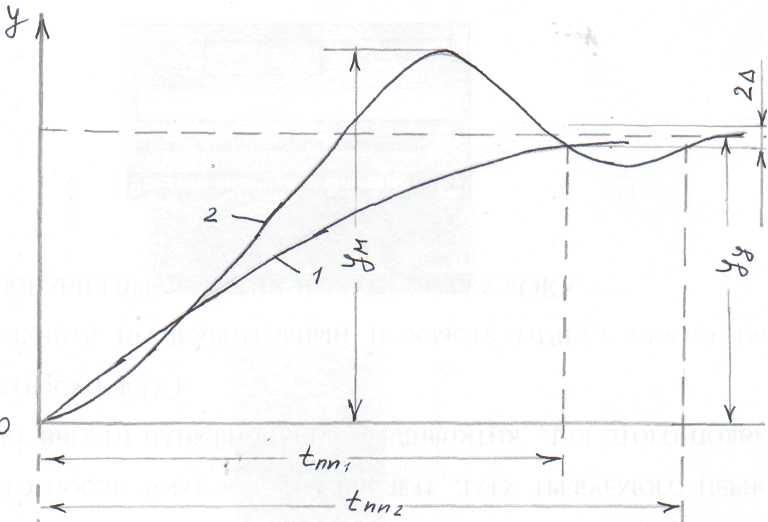
Рис.8.2. Типы переходных характеристик по задающему воздействию
Особенность колебательной переходной характеристики в наличии переходов через установившееся значение (перерегулирований). Если только одно перерегулирование, то характеристика мало колебательная.
У монотонной характеристики не изменяется знак скорости: dy/dt > 0. Иногда к монотонным относят характеристики без перерегулирования, имеющая вид волнистой кривой.
К основным показателям качества переходной характеристики относят перерегулирование σ и время переходного процесса (быстродействие) tпп.
Величина перерегулирования определяется в процентах по формуле: = (ум – уу)/уу *100%.
В большинстве случаев требуется, чтобы перерегулирование не превышало 10—30%. Иногда требуется, чтобы перерегулирование отсутствовало, и процесс был монотонным. В некоторых САР допускают перерегулирование до 50% и более.
Временем регулирования оценивают длительность переходного процесса. Однако в идеальной линейной системе переходный процесс бесконечен, поэтому временем регулирования tпп считают тот промежуток времени, по истечении которого отклонения переходной характеристики у(t) от установившегося значения yу не превышают допустимого значения Δ: | у – уу | ≤ Δ
На рис. 8.2 время регулирования указано для каждой из двух характеристик.
Значение Δ выбирают обычно равным 5% от уу. Иногда устанавливают Δ = 2% и даже Δ = 1%, но такой выбор следует оговаривать.
При заданных значениях σ и tпп переходная характеристика не должна выходить из определенной области, называемой областью допустимых отклонений.
Существенным показателем качества служит также число колебаний, т. е. число максимумов характеристики за время регулирования. Обычно бывает одно, два колебания. Допускается до трех-четырех колебаний.
 Всякая
САР имеет своей целью кроме воспроизведения
задающего
воздействия подавление (уменьшение
влияния) возмущений. Поэтому качество
регулирования оценивают также по
переходной характеристике
уf
= уf
(t)
системы
по возмущению. Основная особенность
этой характеристики (рис. 8.3) в том, что
ее установившееся
значение должно быть весьма мало в
статической системе
(кривая 3)
и
равно нулю в астатической системе
(кривые 1
и
2).
Характеристику,
пересекающую ось абсцисс, называют
колебательной
(кривые 2
и
3)
и,
не
имеющую этого пересечения, называют
монотонной (кривая 1).
Всякая
САР имеет своей целью кроме воспроизведения
задающего
воздействия подавление (уменьшение
влияния) возмущений. Поэтому качество
регулирования оценивают также по
переходной характеристике
уf
= уf
(t)
системы
по возмущению. Основная особенность
этой характеристики (рис. 8.3) в том, что
ее установившееся
значение должно быть весьма мало в
статической системе
(кривая 3)
и
равно нулю в астатической системе
(кривые 1
и
2).
Характеристику,
пересекающую ось абсцисс, называют
колебательной
(кривые 2
и
3)
и,
не
имеющую этого пересечения, называют
монотонной (кривая 1).
Рис. 8.3. Типы переходных характеристик по возмущающему воздействию
Для определения времени регулирования характеристики уf служит то же значение Δ, что и при определении времени регулирования характеристики y (в астатической системе значение Δ откладывают от оси абсцисс).
Понятие перерегулирования для характеристик yf не имеет смысла, и их оценивают непосредственно максимальным значением yfmax.
На рис. 8.3 указаны значения времени регулирования tпп и максимальные значения yfmax для всех трех характеристик. Качество регулирования САР оценивают и по переходным характеристикам ух для ошибки слежения. Они отличаются от уf тем, что их начальное значение не равно нулю, а установившееся значение мало или равно нулю.