

8. Опишите составляющие погрешности управляющего воздействия частотного преобразователя системы пропорционального управления асинхронным двигателем переменного тока.
Точность определяется разрядностью системы.
Общая погрешность системы
Dобщ= Dм + Dвх + Dинстр +Dобр
Dм - методическая погрешность, отражает степень совершенства математической модели реального объекта. Не зависит от ЭВМ.
Dвх - погрешность, возникающая в результате трансформации входных переменных. Пока физическая величина преобразуется в цифровой код, она приобретает погрешность. Не зависит от ЭВМ.
Dобр - (обработки) - методическая погрешность, возникающая в результате приближенных методов вычисления.
Dинстр - обусловлена конечным числом разрядов, используемых для представления чисел в ЭВМ. Ошибка возникает из необходимости округления и накопления погрешностей.
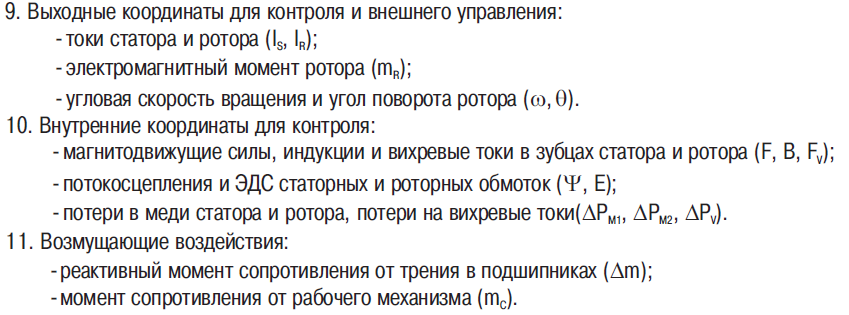
f – частота тока (выход)
I – ток эдв (вход)
Погрешности возникают из-за: тепловые потери, потери на перемагничивание, погрешности измерения тока и количества оборотов, погрешности на каждой стадии обработки ( ЦАП, фильтры). Все эти погрешности суммируются и составляют суммарную погрешность управляющего воздействия.
+схема аналоговой подсистемы вывода из вопроса 4.
Матмодель движка переменного тока:

9. Как оценить быстродействие МН-контроллеров разных производителей применяемых в системе управления транспортно-загрузочными операциями участка механообработки (используйте техпроцесс, указанный в задании).
Быстродействие косвенно определяется числом операций в секунду. Такая характеристика характеризует технические возможности процессора без учета параллельности отдельных блоков ЭВМ и особенностей решаемой задачи и не отражает полностью характеристику быстродействия. Существует такая характеристика - производительность ЭВМ, определенная на основе статистических методов по функции Гибсона.
Производительность зависит от времени выполнения и частоты исполнения операции
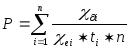
n – количество операций в системе;
Xdi - динамическая частность – статическая характеристика, определяющая частоту появления i-ой команды при выполнении программы;
Xei- статистическая частность – статическая характеристика, определяющая частоту появления i-ой команды в тексте программы;
ti- время выполнения i-ой команды.
Но, мы считаем количество строк в каждом модуле. Каждая строка-это 1 байт (70% команд ОЭВМ являются однобайтными), берем с запасом (15 строк-20 байт). Суммируем байты модулей. Умножаем на 1 микросекунду. Получаем быстродействие. Приводим пример какого-то модуля.
Ras:
; расчет выходных сигналов управления по составленной матмодели
Y3:
mov c, 00h
anl c, 08h
mov 60h, c
mov c, 02h
anl c, 03h
anl c, /2Dh
orl c, 60h
mov 60h, c
mov c, 03h
anl c, 0Bh
anl c, 2Dh
orl c, 60h
mov 60h, c
mov c, 02h
anl c, 1Ah
anl c, /32h
orl c, 60h
mov 60h, c
mov c, 1Ah
anl c, 13h
anl c, 32h
orl c, 60h
mov 60h, c
mov c, 02h
anl c, 27h
orl c, 60h
anl c, /3Bh
anl c, /01h
mov 3Ah, c