

5. Реализуйте программный асинхронный ввод данных с индуктивного датчика малых линейных перемещений для омэвм мк51.
Этот датчик имеет аналоговый выход. Значит необходимо проиллюстрировать схему подсистемы аналогового ввода из вопроса 4.
Асинхронный обмен. Предполагаем, что процессы несинхронизированны. Для организации достоверного приема информации от ВУ процессор ожидает готовности ВУ, анализируя специальный сигнал, называемый флагом.
данные
ЭВМ
ВУ



флаг
Недостаток: ЭВМ простаивает, ожидая флага готовности ВУ.
Достоинство: ВУ с любым быстродействием могут быть обслужены.
п/программа асинхронного ввода в параллельный порт:
ONE: JNB P1.0, ONE ; опрос бита 0 порта 1 (ожидание сигнала «Готов» с АЦП)
SETB P1.1; установка бита в вывод 1 порта 1 ( сигнал «Старт» к АЦП)
MOV A, P0; считываем с порта в аккумулятор
MOV @R0, A; записываем аккумулятор в ячейку РПД
INC R0; инкрементируем регистр
CLR P1.1; очистка бита вывода 1 порта 1
DJNZ R1, ONE ; декремент регистра и переход в начало п/программы, если не 0 (реализация цикла)
Цикл необходим для расчета средней величины поступающего сигнала с АЦП.
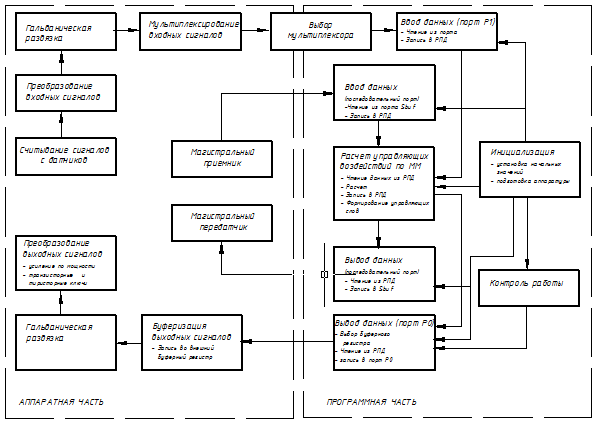
6. Разработайте функциональную схему, алгоритм и подпрограмму обмена данными локальной мпсу на базе омэвм мк51 с эвм высшего ранга. Псу курсач
Обработка прерывания от последовательного порта
│- Ввод данных
│- Чтение кода данных из буфера
│- Декодирование кода данных
│- Формирование адреса ячейки РПД
│- Установка соответствующего бита
\
proc_inic:
mov r1, #30h ;установка адреса для записи входных данных с последовательного порта
mov @r1, #11101010b ;константа для сравнения с q1
inc r1
mov @r1, #11101011b ;константа для сравнения с q2
proc_vvod_posl_port:
q1:mov a, sbuf
mov b,@r1
anl a,b
jnz q2
setb 53
q2:inc r1
mov a, sbuf
mov b,@r1
anl a,b
jnz q3
setb 54
proc_vivod_UV_posl_port:
mov c,104
jnc z2
mov r1, #48h
mov sbuf, @r1
z2:mov c,105
jnc z3
mov r1, #49h
mov sbuf, @r1
7. Опишите составляющие погрешности управляющего воздействия для системы пропорционального управления двигателем постоянного тока.
Точность определяется разрядностью системы.
Общая погрешность системы
Dобщ= Dм + Dвх + Dинстр +Dобр
Dм - методическая погрешность, отражает степень совершенства математической модели реального объекта. Не зависит от ЭВМ.
Dвх - погрешность, возникающая в результате трансформации входных переменных. Пока физическая величина преобразуется в цифровой код, она приобретает погрешность. Не зависит от ЭВМ.
Dобр - (обработки) - методическая погрешность, возникающая в результате приближенных методов вычисления.
Dинстр - обусловлена конечным числом разрядов, используемых для представления чисел в ЭВМ. Ошибка возникает из необходимости округления и накопления погрешностей.
W – обороты двигателя (вход)
Iя – ток якоря (выход)
Погрешности возникают из-за: тепловые потери, потери на перемагничивание, погрешности измерения тока и количества оборотов, погрешности на каждой стадии обработки ( ЦАП, фильтры). Все эти погрешности суммируются и составляют суммарную погрешность управляющего воздействия.
+схема аналоговой подсистемы вывода из вопроса 4.
Матмодель движка:

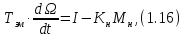

|
|
– |
постоянная времени цепи якоря (электрическая постоянная); |
|
|
– |
электромеханическая постоянная; |
|
|
– |
коэффициент пропорциональности; |
|
|
– |
коэффициент влияния нагрузки. |




где