

7.Индикаторные устройства
Индикаторное устройство предназначено для отображения на экране типовых индикаторов в режимах ИКО и ИДВ, информации о метеоцелях и для фоторегистрации изображения целей и светового табло, на котором представлены данные о параметрах метеорологических целей. Индикаторное устройство включает в себя:
два идентичных индикатора ИК0/ИДВ; индикатор типа А на базе осциллографа С 1-55;
две идентичные панели управления индикаторами;
клавишные переключатели выбора дальности маркера и выбора видеосигналов, расположенные в панели управления МРЛ.
Индикатор ИКО/ИДВ совмещает в себя функции индикатора кругового обзора в полярных координатах (азимут — наклонная дальность) и индикатора в прямоугольных координатах( горизонтальная дальность — высота).
На экране индикатора как в режиме ИКО, так и в режиме ИДВ на масштабах до 100 км отображается подвижная мерцающая метка маркера дальности для точного отсчета дальности (с точностью + 100 м). В режиме ИКО индикатор имеет следующие параметры:
масштабы дальности —25, 50, 100 и 300;
возможность регулируемого смещения начала развертки на величину радиуса электронно-лучевой трубки в любом направлении по азимуту ва масштабах дальности 100 и ЗОО км;
электронные метки дальности для каждого масштаба: 5, 5/10. 10/50 и 50/1 00 км;
азимутальные метки через 30° поворота антенны.
В режиме ИДВ индикатор имеет следующие параметры:
масштабы высота/дальность: 6,25/12,5, 12,5/25. 25/50, 50/100 км;
электронные метки дальности для каждого масштаба: 1, 5, 10 и 20 км;
Отсчет горизонтальной дальности и высоты производится по горизонтальным и вертикальным линиям, нанесенным на трафаретный прямоугольник шкалы индикатора.
Рассмотрим предназначение синхронизатора.
Он необходим для формирования импульсов запуска передающих и индикаторных устройств, фиксации начала и конца коррекции эхо сигналов по дальности, запуска шумовых генераторов. В МРЛ-5 и его модификациях имеются основной и резервный синхронизаторы.
Теперь рассмотрим аппаратуру измерения и обработки эхо-сигналов метеорологических целей.
Измерение мощности отраженных сигналов от метеорологических целей производится в МРЛ-5 с помощью устройств изоэха, для обоих каналов выполненных на базе полупроводников аттенюаторов СВЧ.
В систему изоэха в каждом канале входят два аттенюатора СВЧ, один которых вносит в приемный тракт фиксированное ослабление 42 дБ, а другое ступенчатое ослабление через 6 дБ от 0 до 36 дБ.
Коррекция сигналов на частоте повторения 500 Гц осуществляется пределах от 10 до 100 км, а при частоте 250 Гц от 30 до 300 км. Информация о наклонной и горизонтальной дальностях, а также о высоте цели поступает на табло потенциальным двоично-десятичным кодом от устройства вычислителя координат.
Система управления радиолокатора предназначена для управления аппаратурой, контроля защиты основных устройств. Она обеспечивает работу радиолокатора в одном из двух режимов: «Настройка» или «Работа».
В режиме «Работа» управление осуществляется с панели управления МРЛ-5 и с панелей управления приемопередатчиками на длинах волн 3 и 10 см.
В режиме «Настройка» все органы управления, находящиеся на панелях, обесточиваются, и управление осуществляется непосредственно с лицевых панелей соответствующих устройств.
Система электроснабжения (система питания) предусматривает питание аппаратуры либо от промышленной трехфазной сети 50 Гц 380 В, либо от автономной трехфазной сети 50 Гц 220 В.
Система вторичного питания станции состоит из централизованных и автономных источников питания.
Централизованные источники питания обеспечивают напряжение + 27 и — 27 В, которое используется для питания аппаратуры управления, а также в качестве первичной сети для питания стабилизаторов, имеющих номинал выходного напряжения ниже В, и фильтров потребителей, работающих непосредственно от централизованной сети.
ПОЛУЧЕНИЕ ПЕРВИЧНОЙ ИНФОРМАЦИИ
РАДИОЛОКАЦИОННЫХ НАБЛЮДЕНИЙ В БЛИЖНЕЙ И
ДАЛЬНЕЙ ЗОНАХ
После подготовки МРЛ к наблюдениям и записи измеренных параметров в журнал получения дополнитепьной информации, выполнения расчетов критериев грозоопасности и принятия решения о методике работы дежурная смена, состоящая из двух человек, должна приступить к получению первичной информации. Объем этой информации, а также порядок ее получения будет различен для теплого, переходного и холодного периодов года.
Съем первичной информации с экранов индикаторов кругового обзора и дальность — высота К’ГРЛ производится на прозрачные шаблоны с помощью жирного карандаша. На шаблонах последовательно фиксi контуры радиоэхо, максимальные углы возвышения, при которых появляется радиоэхо облаков и осадков, интенсивности отраженных сигналов на разных уровнях высот. Затем эти данные переносятся с помощью светового столика с шаблонов на бланк — карту С помощью вспомогательных таблиц переводят зафиксированные углы возвышения в высоты радiюэха облаков, а интенсивности отраженньтх сигналов в логарифмы отражаемости.
Рекомендуется следующая последовательность съема первичных данных:
) обзор общих картин распределения радиоэха в радиусе обзора МРЛ под оптимальным углом возвышения антенны и при углах возвышения, равных 5 и 10°;
> фиксирование местонахождения характерных элементов радиоэха в момент времени i (первых контуров) для определения направления и скорости перемещения за малый промежуток времени;
получение картины горизонтального распределения неприподкятого радноэха в радиусе его наблюдения;
> измерение максимальных углов возвышения, при которых радноэхо появляется в дальней зоне, и параллельно получение картины горизонтального распределения (контура) припод радиоэха;
> измерение максимальных интенсивностей отраженных сигналов на стандартных уровнях в дальней зоне с одновременным или последующим (на световом столике);
фиксирование местонахождения характерных элементов радиоэха в момент времени (вторых контуров) для определения направления и скорости;
выбор азимутов на ИКО для получения вертикальных разрезов облаков; сьем данных в ближней зоне на ИБВ;
> определение типа радиоэха;
нанесение всех первичных данных на бланк — карту МРЛ.
По грозам и другим опасным явлениям решение между теплым и переходным периодом принимается в пользу теплого периода; между переходным и холодным — в пользу холодного. По осадкам решение принимается в пользу более холодного периода.
Когда на ИКО МРЛ в данный срок наблюдений могут одновременно наблюдаться две, соседствующие или граничащие одна с другой, зоны с осадками разного фазового состояния, то решение принимается по условиям, существующим в приближающейся к аэропорту зоне радиоэха облаков и осадков. При проведении наблюдений, получении первичных данных и анализе информации следует строго соблюдать общий принцип: в первую очередь необходимо выявить в РI{О зоны стихийных явлений (смерч, шквал >25 м/с, град с грозой), затем остальные опасные явления (ОЯ).
При наличии нескольких изотерм 0°С (особенно в переходный период) определяющей для принятия решения является:
самая высокая из них — при определении ОЯ, а также обледенения и элекгроактивных зон;
самая низкая из них — при определении фазового состояния осадков.
для получения первичных данных вся зона радиолокационного обзора делится на две части:
> ближнюю — от О до ЗО км по 141(0 и до 40 км (на МРЛ-1 и МРЛ-2) или до 50 км (на МРЛ-5) по ИДВ;
дальнюю — от 30 до ЗОО км.
В ближней зоне обзор пространства осуществляется при качании (сканировании) антенны в вертикальной плоскости в разных направлениях от МРЛ (азимутах), используя для наблюдений вертикальных разрезов метеообъектов и измерений их радиолокационных характеристик ИдВ шаблоны, накладываемые на экран ИДП. Рабочим масштабом ИДВ является масштаб 20/40 км (на МРЛ-1 и Л-2) или 25/50 км (на МРЛ-5).
В дальней зоне пространство просматривается на индикаторе ИКО при последовательных круговых обзорах под разными углами возвышения антенны с использованием шаблонов, накладываемых на экрав ИКО. Рабочим масштабом ИКО является масштаб 300 км во все периоды года и сроки наблюдений.
В теплых период года 1 7 или величины отраженных сигналов (Р измеряются на следующих уровнях: на высоте 1 км, являющейся высотой середины слоя, в котором производятся измерения обозначается Н ла уровне высоты нулевой изотермы, являющийся высотой середины слоя — обозначается Н на уровне Н + (2+2,5) км, являющийся высотой середины слоя — обозначается Н
Ознакомление с радиометеообстановкой заключается в том, что оператор просматривает на 141(0 обозреваемое антенной МУЛ пространство, включив масштаб 300 км и режим работы <вращение». При минимальном рабочем угле возвышения е = 0... 0,5° для обнаружения зон осадков, нижняя граница радиоэха которых достигает земной поверхности; при е = 5 и 10° для обнаружения развивающихся или развитых СЬ, а также приподлятого радиоэха.
При осмотре пространства на ИКО оператор должен уделять внимание не только дальней, но в первую очередь ближней зоне.
Определение поля высот радиоэха производится путем последовательных измерений величин Ц (км) в каждом квадрате пространства, занятого радиоэхом, размером 30 х 30 км. для определения измеряются максимальные углы возвышения антенны ЕЧ в центре каждого квадрата, при которых отмечается момент первоначального появления радиоэха при движении антенны сверху вниз при последовательном уменьшении угла возвышения антенны на 1°.
для получения картины распределения величины 1 7 на одном из уровней применяется способ измерения величин РЩ,/РО при разных углах возвышения антенны е и различной дальности г На экран ИКО накладывается специальный шаблон с координатной сеткой, с контурами равных значений г и значениями углов возвышения антенны, относящихся к площадям между соседними контурами г При вращении антенны последовательно устанавливаются величины углов в нанесенные на шаблон, и осуществляется измерения П в квадратах. Измерение величин РП осуществляется с помощью системы изоэхо на ИКО следующим образом:
> устанавливается е указанный на шаблоне;
устанавливается такой уровень изоэха, при котором на экране ИКО исчезает радиоэхо;
) последовательно снижается уровень изоэха через б дБ и в каждом квадрате отмечается величина уровня в децибелах, при котором появляется радиоэхо.
Получение картин вертикальных разрезов радиоэха облаков производится в масштабе 20/40 км для МРЛ- 1, МРЛ-2 или в масштабе 25/50 км МРЛ-5. При этом:
на ИКО выбираются азимуты разрезов и устанавливаются на И масштаб развертки М: 20/40 км или М: 25/5 0 км;
> устанавливается один из выбранных азимутов;
включается режим «сканирования» антенны, который обеспечивает автоматическое качание антенны ло углу возвышения в в пределах от
—1 до 105° для МРЛ-1,2 нот -1 до 85° для МРЛ-5.
Интересующая нас картина наблюдается на ИДВ. Съем вертикальных разрезов радиоэха производится срисовыванием с экрана ИДВ на бланк в определенном порядке:
если в ближней зоне отмечено однородное поле радиоэха во всех квадратах, то верхний азимут должен относиться северо-восточному квадрату, второй — к юго-восточному, третий — к юго-западному, четвертый — к северо-западному;
если в каких-либо квадратах радиоэхо отсутствует, заполнение азимутов на бланках не производится, делается запись «радиоэха нет»;
Возможен и способ факсимильного изображения контура радиоэха на шаблоне.
Измерение границ облаков может быть произведено только за пределами «мертвой» зоны М протяженность которой изменяется от 1 до 4 км.
Для измерения верхней границы радиоэха следует выбирать наиболее высокие области радиоэха и определять их высоту. Высота РКО, если его верхняя граница замаскирована облаками верхнего или среднего яруса, определяется на удалении, где отмечается зона максимальной отражаемости.
В случае, когда нижняя граница принципиально определима, болылуiо точность определения границ, чем на ИДВ, обеспечивает способ наклонного зондированая.
При наличии радиоэха слоисто-дождевой облачности его верхняя граница часто резко убывает с расстоянием. В этом случае верхняя граница измеряется по ближайшей к левому краю экрана самым высоким точкам за пределами «мертвой» зоны и распределяется на всю зону радноэха.
Работа МРЛ в режиме i
Радиолокатор — одно из самых эффективных средств штормоповещения. Штат МРЛ обязан начать работу в режиме штормоповещешя в следующих ситуациях:
- если в процессе выполнения программы наблюдений будет обнаружено в радиусе 180 км радиоэхо кучевообразных облаков с величиной отражаемости на уровне Н 1 7 1,2, а в случае отсутствия отраженных сигналов на уровне Н РКО с отражаемостью ? 1,8; в тех районах, где установлено, что 1 7 минИ =2, начало работы в режиме «шторм» начинается с 1 > 1,8;
- если скорость перемещения радиоэха превосходит 65 км/ч (18 м/с);
- если к зоне аэропорта перемещается один или несколько очагов РI{О. пересечение траектории которых ожидается в районе аэропорта;
- если отмечается интенсивность осадков в РКО, превышающая 25 мм/ч (
2,8) в радиусе 90 км.
Если при очередном ежечасном сеансе наблюдений где-либо на экране ИКО в радиусе i80 км обнаруживается кучево-дождевые облака, очаги гроз, ливией, града, которые до этого не наблюдались. то, не дожидаясь оформления очередной карты, дежурный техник — оператор МРЛ обязан немедленно известить дежурного синоптика.
рррстьинапавлен перем си ця локальных ячеек и облачных систем
При разработке краткосрочi прогноза погоды для определения времени начала осадков или опасных явлений в пункте необходимо звание характеристик движения радиоэха. Прогнозирование перемещения зон радвоэха возможно путем; экстраполяции движения переднего края или центра тяжести мезомасштабной площади радноэха, основанный на фактических данвьхх об их положении в предшествующие моменты времени; использование корреляционных связей, детерминировавных признаков и правил с привлечением аэросиноптической информации о поле ветра в интересуемом районе.
Возможны ситуации, когда определение параметров движения радиозха облаков и их систем затруднено. Случаи следующие:
- зона радиоэха симметрична относительно центра экрана ИКО и нет твердой уверенности в том, что видимая граница радиоэха является границей облачной системы;
- невозможно определить границы облачной системы, при внутримассовой конвекции. В этом случае возможно измерение скорости и направления движения отдельных зон РКо;
облачное поле целиком соетоит из слоистообразной облачности одного или нескольких ярусов, при этом заведомо известно, что эффективный радиус обнаружения любой из форм облачности много меньше действительной горизонтальной протяженности облачных систем таких облаков.
Рекомендуется следуюшая очередность операций при определении направления и скорости перемещения радиоэха облачвого поля.
- на планшете проводятся контуры радиоэха площади синоптнческого масштаба (ПСМ) в момент времени , которое фиксируется под углами возвышения антенны = 0.. 1°.
- через промежуток времени д (30 мин 90 мин) в момент времени втор проводятся новые контуры радиоэха при тех же условиях наблюдения.
- проводится перпендикуляр к переднему краю ралиоэха или его оси, если радноэхо в виде линии.
- по перпендикуляру отмечается азимут движения радиоэха ПСМ с точностью до ближайших 10° относительно севера (куда движется).
- скорость вычисляется по формуле = 60 (1 (км/ч).
- в срок вновь проводится контур радиоэха и отмечается время его получения. Уточ направление движения по перпендикуляру к переднему краю контура радиоэха ПСМ и смещение.
- рассчитывается скорость = 60 (1
- вычисляется средняя скорость за интервал времени Ё — = Л + дЁ Г = (Г +
- для расчета средней сглаженной скорости рекомендуется использовать не более 3 —4 значений 1
Рекомендуется соблюдать следующую очередность операций при определении скорости и направлении движения мезомасштабных элементов радиоэха.
- на ИКО устанавливается рабочий масштаб 100 или 150 км в зависимости от удаления мезомасштабных зон радиоэха от пункта МРЛ.
- под углом возвышения антенны б = 0... 1° производится оконтуривание отдельных элементов радноэха или групп радиоэха.
- отмечаются геометрическле центры оконтуренных элементов радиоэха или групп ячеек радиоэха.
- через интервал времени Л (15 Ай 20 мин) в момент проводятся новые контуры для выбранных ранее мезомасштабных элементов.
- прямой линией соединяются центры оконтуренных элементов радиоэха и с максимальной точностью с учетом масштаба определяется смещение.
- направление движения каждого оконтуренного элемента радноэха отмечается по вектору направления относительно севера с точностью до
100.
- скорость вычисляется по формуле Г = 60 (1
- путем пространственного осреднения значений скорости определяется Г для нескольких мезомасштабных радиоэха. Пространственное осреднение для направления не допускается.
- через интервал А = 15 — 20 мин в срок 1 проводятся новые контуры. Вычисляется скорости и направление.
- по скоростям, вычисленным в самый последний срок наблюдения, уточняется время прихода осадков в пункт.
АВТОМАТИЗИРОВАННЫЕ МЕТЕОРОЛОГИЧЕСКИЕРАДИОЛОКАЦИОННЫЕ СТАНЦИИ
МРЛ в радиусе своего обзора осуществляет:
- обнаружение облаков и связанных с ними опасных явлений; их распознавание по заданным алгоритмам и необходимой потребителю классификации;
- определение для каждого явления местоположения, геометрических размеров, интенсивности, скорости и направления движения, тенденции развития;
- измерение интенсивности и количества осадков в оптимальных условиях;
- определение нулевой изотермы внутри слоисто-дождевых облаков и в кучево-дождевых облаках в стадии распада;
- определение доплеровских скоростей в облаках и осадках;
- определение фазового состояния отражающих объектов.
Периодичность обновления информации МРЛ в радиусе обзора меняется в широких пределах, но для подавляющего большинства потребителей она составляет от 3 до 15 минут.
Точность определения высоты верхней границы облаков определяется шириной диаграммы направленности и метеорологическим потенциалом. Точность измерения отражаемости и доплеровских скоростей определяется принятыми системами обработки и калибровки приемно-измерительных трактов МРЛ.
По результатам исследований радиус действия МРЛ-2; МРЛ-5 при вероятности обнаружения метеообъектов не менее 95% находится в следующих интервалах:
150-200 км Кучево-дождевые облака с грозой и градом
120 км Слоисто-дождевые облака летом
90-120 км Кучево-дождевые облака с ливнем и снегом.
60 км Слоисто-дождевые облака зимой
до 60 км Обложные моросящие осадки летом
до 30км Обложные моросящие осадки зимой
до 20 км Облака всех форм без осадков
Эти данные получены для равнинных районов России. Ограничивающими факторами обнаружения являются следующие: эффект кривизны Земли (при удалении объекта наблюдения растет зона радиотени), увеличение с расстоянием минимально принимаемых отраженных сигналов и ослабление радиоволн в осадках и газах атмосферы.
Для автоматизированной обработки аналоговых отраженных сигналов их нужно перевести в цифровую форму. С этой целью весь сканируемый МРЛ объем пространства делится на элементарные ячейки (бины). Нижний предел бина равен импульсному объему, т.е. он ограничен шириной диаграммы направленности антенны МРЛ и половиной длительности зондирующего импульса. По нескольким элементам дальности можно построить ячейку дальности.

Чем больше удаление от МРЛ, тем крупнее ячейки. В прямоугольных координатах ячейки имеют одинаковый размер на всех удалениях от МРЛ. Принятый сигнал осредняется по дальности в нескольких последовательных элементах дальности и образует ячейку дальности. Полученный результат для ячейки дальности с осреднением по дальности снова осредняется по азимуту путем последовательных измерений при движении антенны примерно на одну ДНА. Первоначальное осреднение по дальности может осуществляться аппаратурой или компьютерной программой.
Функциональная схема системы автоматизации приведена на рис.1.
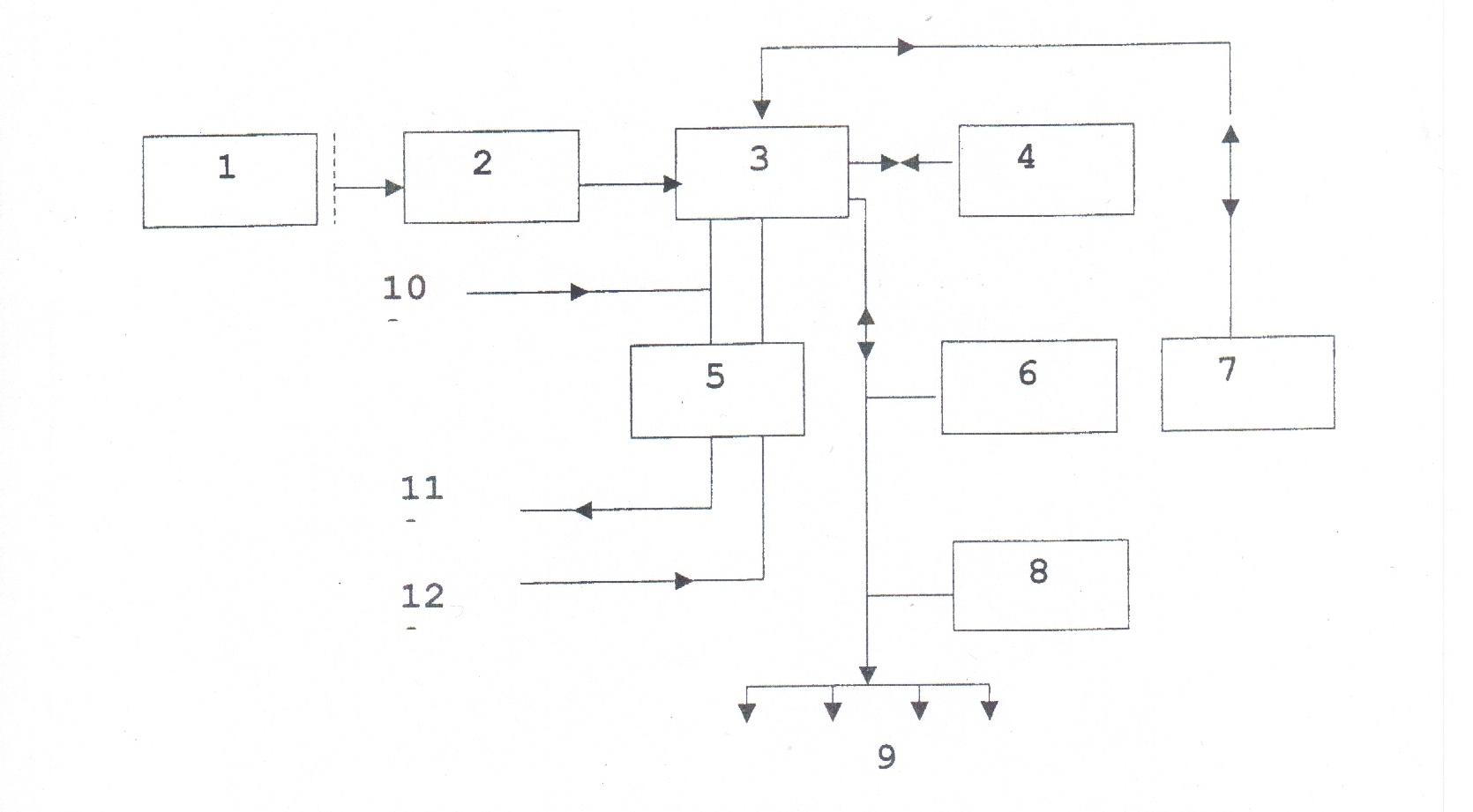
Рисунок 1 - Типовая функциональная схема системы автоматизации МРЛ
1 - вход логарифмического приемника МР Л,
2 - блок предварительного интегрирования и осреднения,
3 - ЭВМ,
4 - блок записи данных для архивации,
5 - блок сопряжения ЭВМ (интерфейс) с системой управления антенной,
6 - телетайп или видеоконтрольное устройство,
7 - сеть дистанционных плювиографов для калибровки радиолокационной
информации,
8 - дисплей,
9 - выходы к дисплеям, печатающим устройствам или другим ЭВМ,
10 - сигнал от блока синхронизации МРЛ,
11,12 - сигналы от антенны и для управления антенной МРЛ
Принятый сигнал от метеообразования осредняется по дальности и по азимуту при вращении антенны МРЛ. Осреднение отраженных сигналов и расчет отражаемости Z происходит на элементе дальности ∆R по площади, равной:
∆R ∙ Ɵ = ∆R (ω ∙ t / 360º)
ω - скорость вращения антенны, Ɵ - ширина ДНА.
3атем результаты измерений Z переводят из полярных координат в декартовые, при этом стороны квадрата могут устанавливаться на 1,2,4 или 5 км, а разрешение по вертикали принимается равным 0,5 км, 1 км или 2 км. Измеренная по изложенному алгоритму отражаемость Z в квадрате выбранных размеров переводится по заданному соотношению Z → 1 в интенсивность осадков, которая необходима потребителю.
Во всем динамическом диапазоне отраженных сигналов (до 100 дБ) требуемая точность оценки радиолокационной отражаемости составляет 1 дБ.
Общепринято, что при условии пространственной однородности радиоэхо недостаток осреднения во времени при получении оценки Z можно компенсировать дополнительным осреднением по пространству. Поэтому в автоматизированных МР Л обработка отраженных сигналов производится с одновременным осреднением по времени и пространству.
Как показали результаты расчета по площади 4*4, точность измерения величины 101gZ при требуемой точности оценки σz= 1 дБ, где σz - дисперсия оценки среднего уровня сигнала в зависимости от расстояния меняется от 0.1 при R = 10км до 0.51 при R = 250 км.
Обязательные этапы автоматизированной обработки
При автоматизированной обработке радиолокационных наблюдений существуют три этапа получения информации, которые могут быть реализованы как техническими, так и программными средствами:
1. Режим обзора пространства, первичная обработка сигналов, обеспечивавшая измерение параметров радиоэхо и выдачу информации для дальнейшей обработки по алгоритмам;
2. Формирование с помощью алгоритмов оптимального объема радиолокационных характеристик метеообразований путем метеорологической интерпретации первичных (базовых) радиолокационных данных, измерение интенсивности и количества осадков;
3. Представление выходной информации потребителям, совмещение ее с другими видами информации и хранение радиолокационных данных в течение заданного срока.
В каждой конкретной аппаратуре эти три обязательных этапа могут выполняться по-разному, но, главное, они должны гарантировать результаты с точностью, не ухудшающей тактико-технические характеристики неавтоматизированных МРЛ.
Обязательным требованием к аппаратуре автоматизации является наличие дистанционных систем встроенного контроля основных параметров МРЛ и систем калибровки. Задачей калибровки является получение количественных соотношений между уровнем выходных сигналов и отражаемостью метеоцелей.
Возможности автоматизации возрастают с увеличением быстродействия и объема памяти ЭВМ. В настоящее время первичная и вторичная обработка радиолокационной информации, как правило, производится на ЭВМ.