Ансамблевый фильтр Калмана
Из-за сложности процедуры использования фильтра Калмана в многомерных, нелинейных системах используются его упрощения.
а) Комбинация 4-мерного вариационного метода и фильтра Калмана. Если в качестве окна ассимиляции брать модельный шаг, то 4-Д Вар метод позволяет эффективно вычислять ковариационную матрицу ошибок анализа, избегая большого числа вычислений при оценке ее обычным способом. Затем можно использовать фильтр Калмана для прогноза ковариационной матрицы ошибок прогноза в следующий момент времени.
б) Ансамблевый фильтр Калмана.
Используется ансамбль анализов вектора состояния среды
![]() ,
,
по которым на каждом временном шаге, с помощью оператора моделирования рассчитывается ансамбль первых приближений:
![]()
Используя полученный ансамбль первых приближений можно оценить среднее значение вектора состояния
И ковариационную матрицу ошибок первого приближения
![]()
Для построения ансамбля анализов используется ковариационная матрица ошибок анализа
![]()
Для упрощения процедуры часто используется локализация, когда рассматриваются ковариации только между компонентами вектора состояния, расположенными на ограниченном расстоянии от узла анализа.
Кроме
того, часто помимо ансамбля анализа
используются также и возмущенные
наблюдения, когда формируются
![]() наборов
наблюдений, сгенерированных согласно
матрице ошибок наблюдений
наборов
наблюдений, сгенерированных согласно
матрице ошибок наблюдений![]() .
.
Простой пример фильтра Калмана
Основные мысли предыдущего раздела поможет прояснить следующий простой пример. Рассмотрим задачу вывода реальной температуры воздуха номиналом 20 градусов из повторных измерений термометром и их обработки фильтром Калмэна. В первую очередь необходимо установить модели, связывающие состояния нашей системы с измерениями и между собой, а также их статистические характеристики, служащие для вычисления весов. В данном случае имеет место всего одна величина, характеризующая неизменное состояние системы, — неизвестная температура x. Таким образом, модель, описывающая состояние системы, выглядит как
![]()
Т.е. температура не меняется от времени к времени. Предположим, что распределение температуры характеризуется нормальным распределением с дисперсией 4 градуса в квадрате (среднеквадратическое отклонение 2 градуса). Это можно принять как ошибку прогноза неменяющейся температуры, т.е.
![]()
Измерения температуры термометром дают истинные значения температуры, отягощенные инструментальными ошибками
![]()
Если, в соответствии с документами прибора дисперсия составляет 1 градус в квадрате, то
![]()
тогда вес измерения составит

Результат анализа, т.е. исправленное значение будет
![]()
Таким
образом, чем больше вес измерения
![]() ,
тем больше его вклад в результат нулевого
анализа.
,
тем больше его вклад в результат нулевого
анализа.
Ошибка анлиза будет характеризоваться его дисперсией
![]()
т.е. дисперсия прогноза за счет хорошего измерения существенно уменьшилась.
Это была аналитическая часть, далее идет прогностическая часть
![]()
![]()
т.к. модель в данном случае являетя безошибочной.
Теперь опять часть анализа
![]()
![]()
таким образом ошибка анализа еще больше уменьшилась.
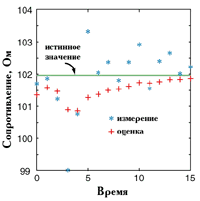
Аналогичная последовательность операций продолжается и далее.
Рисунок показывает, как результат анализа сходится к истинному значению температуры в данной точке.