

25. Интерфейсы rs-422 и rs-485: назначение, основные технические характеристики, принципы передачи данных.
В основе построения интерфейсов RS-422/RS-485 лежит принцип дифференциальной (балансной) передачи данных. Суть его заключается в передаче одного сигнала по двум проводам, скрученных между собой и образующих витую пару.
Обычно один провод условно именуют как ‘A’, а другой – ‘B’. Полезным сигналом является разность потенциалов между проводами A и B: UA – UB = UAB. Для организации интерфейсов необходимы линейные передатчики с дифференциальными выходами и линейные приемники с дифференциальными входами.
На рис. 14.4 приведено условное изображение линейного передатчика интерфейсов RS-422/RS-485 и временная диаграмма его выходного сигнала. Передатчик выдает напряжение от 2 до 6 В между выводами A и B. Передатчик также имеет вывод C общей точки (провода) схемы. В отличие от интерфейса RS-232C общий провод здесь не используется для определения состояния линии данных, а применяется только для присоединения сигнального заземления. Если на выходе передатчика 2 < UAB < 6 В, то это соответствует логическому 0, а диапазон -6 < UAB < -2 В соответствует логической 1.
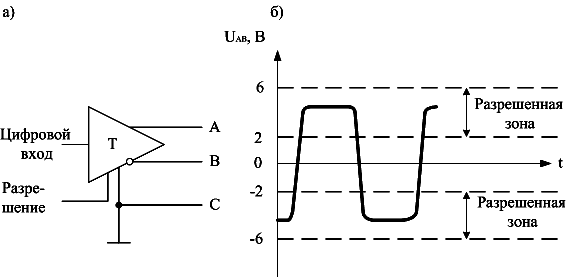
Рис. 14.4. Передатчик интерфейсов RS-422/RS-485:
а) - условное обозначение;
б) - временная диаграмма выходного сигнала UAB
Линейный передатчик интерфейса RS-485 должен обязательно иметь вход управляющего сигнала «Разрешение». Назначение этого сигнала – соединять выходы передатчика с линейными выводами A и B. Если сигнал «Разрешение» находится в состоянии «Выключено» (обычно логический 0), то передатчик будет отсоединен от линии. Состояние отключения линейного передатчика обычно называют его третьим или Z-состоянием.
Дифференциальный приемник анализирует сигналы из линии связи, поступающие на его входы A и B. Если на входе приемника UA – UB = UAB > 0,2 В, то это соответствует логическому 0, если UA – UB < -0,2 В, то это логическая 1. Диапазон | UA – UB | < 0,2 В является зоной нечувствительности (гистерезисом), защищающей от воздействия помех.
Линейный приемник также должен иметь вывод C общего провода схемы, чтобы выполнить сигнальное заземление.
Применение дифференциального метода передачи сигналов обеспечивает хорошую помехоустойчивость интерфейсов. Для аппаратной реализации интерфейса используются микросхемы приемопередатчиков (трансиверов) с дифференциальными входами/выходами, подключаемыми к линии, и цифровыми входами/выходами, подключаемыми к модулю UART микроконтроллера.
В интерфейсе RS-422 для организации дуплексного обмена (в двух направлениях) используются две отдельные пары проводов. На каждой паре может быть только по одному передатчику и до 10 приемников.
В интерфейсе RS-485 для организации полудуплексного обмена достаточно одной пары проводов, по которым ведется прием и передача сигналов с разделением по времени. В сети может быть много передатчиков и приемников (до 32 передатчиков, приемников или их комбинаций).
Максимальная скорость передачи данных по интерфейсам RS-422/RS-485 определяется множеством факторов: длиной и параметрами линии связи, параметрами приемников и передатчиков. Максимальная скорость передачи на коротких расстояниях (до 12 м) ограничивается быстродействием передатчиков и по стандарту равна 10 Мбит/с. На средних расстояниях (десятки и сотни метров) скорость передачи уменьшается из-за возрастания потерь в емкостях изоляции кабеля и активных сопротивлений проводов. Так, например, при длине линии 120 м максимальная скорость передачи не превышает 1 Мбит/с. Максимальная длина кабеля связи по стандарту ограничена величиной 1200 м, при этом скорость передачи не превышает 100 Кбит/с.
Достоинством интерфейсов RS-422 и RS-485 являются: дешевизна соединительных кабелей; дешевизна реализации трансиверов; большой парк работающего оборудования, реализующего эти стандарты; возможность организации гальванической развязки.
Недостатком интерфейсов является то, что они отсутствуют в стандартной комплектации компьютеров и микроконтроллеров. Интерфейсы имеют довольно значительное энергопотребление и относительно невысокую скорость передачи данных.