

1.3. Устройство механической части вибрационного источника
Рассмотрим общие принципы функционирования сейсмических вибраторов.
По сигналу запуска, получаемому по радио, электроника начинает формировать частотномодулируемый сигнал (рис. 1.2), который подаётся на соленоид и на гидроусилитель рис. 1.1).
Гидроусилитель приводит в движение массу величиной в несколько тонн. Эта масса, соединённая с землей через опорную плиту, формирует сейсмическую волну.
При этом в связи с конечность скорости движения жидкости в гидроприводе и особенности верхнего слоя почвы происходит искажение необходимых амплитуды и фазы сигнала.
Для устранения разности фаз и амплитуд между сигналом сформированным электроникой и сигналом на опорной плите применяется разрабатываемая система управления.
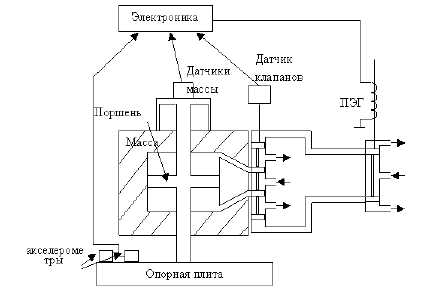
Рис. 1.1 Схема гидравлического сервопривода вибратора (стрелками показано направление движения жидкости).
Контроль смещения опорной плиты осуществляется посредством двух акселерометров, установленных на ней для регистрации сейсмического воздействия на опорной плите, которая плотно контактирует с грунтом и передает воздействие в землю. Сигнал от акселерометра, равен сигналу ускорения движения массы, т.е. второй производной от координаты. Координата изменяется по закону синуса, следовательно, вторая производная – минус синус, с той же частотой. Сигналы из акселерометров поступают в блок электронной аппаратуры вибратора, где подвергаются обработке и сравнивается по амплитуде и фазе с опорным сигналом вибратора. После этого в блоке электронной аппаратуры осуществляется фазовая коррекция сигнала, поступающего на соленоид, который управляет колебаниями опорной плиты, обеспечивая постоянство параметров во время всей генерации. Сигнал другого акселерометра используется для оценки идентичности сигналов одного или нескольких вибраторов и опорного сигнала в регистрирующем устройстве. Этот сигнал обычно использует для контроля и регистрации устройством управления, где он анализируется на предмет фазовых и нелинейных искажений.
Поскольку жесткая масса, с которой связана опорная плита вибратора, не бесконечно велика, появляется необходимость контролировать состояние массы, для чего на нее также устанавливается два акселерометра.
1.3 Виды генерируемых сигналов
При вибросейсморазведке применяют сигналы с изменяемыми во времени параметрами (СВИП), то есть у этих сигналов в различные моменты времени могут иметь место различные значения амплитуды и частоты.
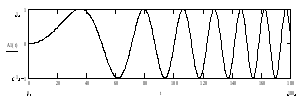
Рисунок 1.2 СВИП сигнал
Главное отличие СВИП сигналов друг от друга – это зависимость изменения параметра от времени. На рисунке 1.1 приведен пример типичного СВИП сигнала с линейной зависимостью частоты от времени.
Основными параметрами сигналов являются:
-
F1 – начальная частота
-
F2 – конечная частота
-
SL – время излучения
-
T – время
В настоящее время путем теоретической и практической проработки были определены наиболее предпочтительные виды СВИП сигналов, с помощью передачи и приема которых, получается наиболее полная геологическая картина при сейсморазведке. Эти законы изменения и их параметры общепризнанны и поэтому в разрабатываемом устройстве предполагается выполнить реализацию генератора со следующими законами изменения частоты от времени:
-
Линейный:
|
|
(1.0) |
|
где F1 – начальная частота, Гц; F2 – конечная частота, Гц; SL – время излучения, с; t – время, с.
|
|
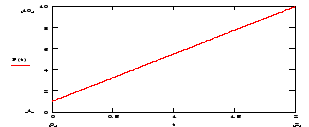
Рисунок 1.3 Линейный закон изменения частоты от времени
-
Т-Power:
|
|
( 1.0 ) |
|
где n изменяется (0,3…3) |
|
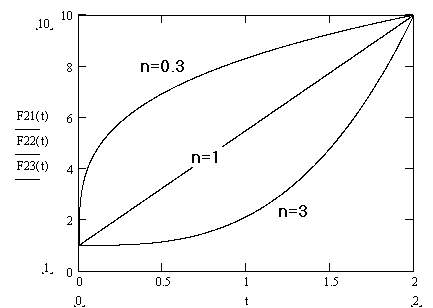
Рисунок 1.4 Вид изменения частоты от времени Т-Power
-
dB на октаву:
|
|
( 1.0 ) |
|
|
( 1.0 ) |
|
|
( 1.0 ) |
|
|
( 1.0 ) |
|
где dBOct изменяется ±(0,01…0,5) |
|




-
dB на Герц:
|
|
( 1.0 ) |
|
где a изменяется ±(0,001…0,5) |
|

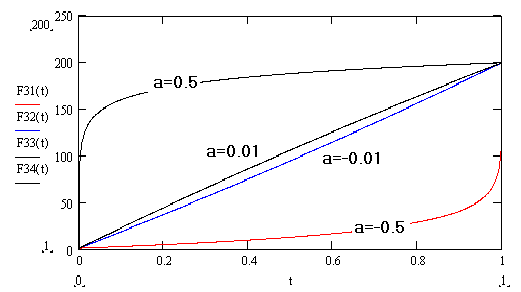
Рисунок 1.5 Зависимость закона изменения частоты от времени dB на
октаву от параметра
Зависимости dB на октаву и dB на Герц на малых частотах по виду близки к линейной зависимости, поэтому имеет смысл их использование на значительных интервалах частот.
Как было сказано выше, помимо изменения частоты во времени изменяется также и амплитуда сигнала по определенному закону.
|
|
( 1.0 ) |

Наиболее используемым является косинусоидальный закон изменения амплитуды (в формуле (1.8)), который распространяется на определенный период сигнала, что позволяет привести сигнал к форме (смотри рисунок 1.5). Это имеет важное значение, так как позволяет плавно ввести механическую часть источника к режиму максимальной амплитуды.
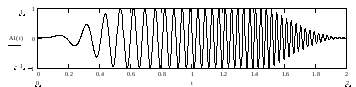
Рисунок 1.5 СВИП сигнал с применением косинусоидальной огибающей