

L1a_Mag
.pdf41
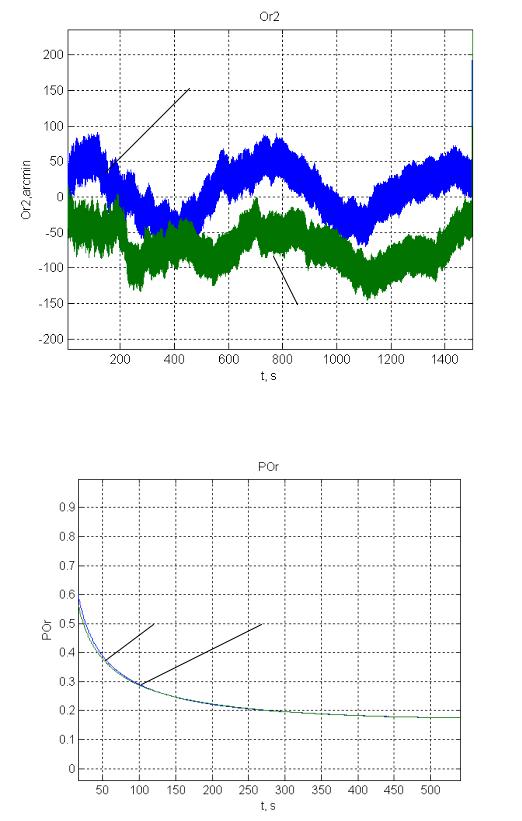
Обсервационный режим работы
без использования в измерениях дополнительных динамических слагаемых, обусловленных наличием линейных ускорений из-за вращения ОУ и отстояния ИБ БИИМ от оси вращения
1
2
Рис. 5.1в. Погрешности (угл.мин) ориентации по углам качки (1), (2)
2
1
Рис. 5.1г. Дисперсии погрешностей ориентации (расчетные нормированные значения - sqrt(P/P0))
42
при использовании в измерениях дополнительных динамических слагаемых, обусловленных наличием линейных ускорений из-за вращения ОУ и отстояния ИБ БИИМ от оси вращения
1
2
Рис. 5.1д. Погрешности (угл.мин) ориентации по углам качки (1), (2)
1 |
2 |
Рис. 5.1е. Дисперсии погрешностей ориентации (расчетные нормированные значения - sqrt(P/P0))
43
Результаты объектовых испытаний Задача навигации (с оценкой уровня сужения полосы пропускания системы слежения за несущей в ПА СНС)
Принцип формирования информационной поддержки ПА СНС от БИИМ
В используемой ПА СНС «Котлин» (разработка ОАО «РИРВ») реализован алгоритм двухэтапной обработки сигналов НСi. На первом этапе формируются оценки первичных навигационных параметров (радионавигационных параметров РНП) с помощью следящих измерителей (СИ) фаз несущих колебаний (систем слежения за несущей – ССНi) и задержек дальномерных кодов (систем слежения за задержкой – ССЗi). На втором этапе решается навигационная задача (НЗ) с формированием КСВ-решения.
В современных спутниковых приемниках взаимодействие системы слежения за задержкой и системы слежения за несущей организовано путем поддержки ССЗ по данным ССН. Что существенно снижает погрешности дальномерного канала и ПА СНС в целом. Особенно в случае, когда возможно повышение качества работы ССН, например, за счет сужения полосы следящей.
Подобное сужение полосы следящей ССН позволяет, помимо снижения времени поиска сигнала НСi (после его потери) существенно повысить помехоустойчивость ПА СНС и ИСОН в целом. Причем, для повышения качества работы ССН достаточно лишь линейной скорости перемещения фазового центра антенны (АУ) ПА СНС, полученной от БИИМ. При этом отдельной информационной поддержки ССЗ от БИИМ не требуется.
Иными словами в ИСОН вводится обратная связь по скорости от БИИМ для поддержки ПА СНС и обеспечения еѐ устойчивой работы.
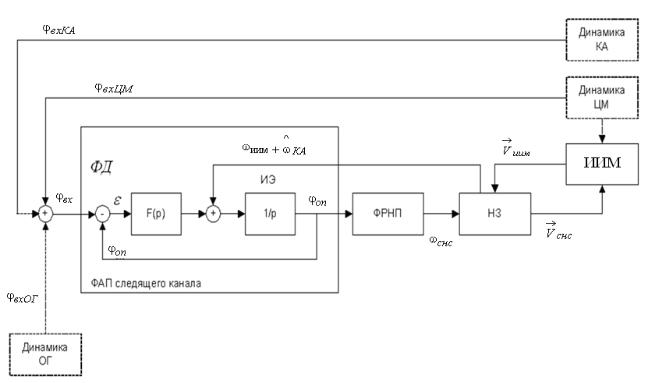
Определенность в данном случае достигается за счет известного вида передаточной функции ФАП (функции фазовой автоподстройки) следящего канала ССН. В общем случае данная передаточная функция для ПА СНС различных производителей может быть различной. Общая структура ФАП ПА СНС, входящей в состав экспериментального образца ИСОН, представленная ОАО «РИРВ», приведена на рис. 3.2.
Рис. 3.2 – Структура системы ССН с частотной (скоростной) поддержкой от ИИМ (БИИМ)

44
На рисунке использованы следующие сокращения и обозначения: ФАП – система фазовой автоподстройки частоты; НЗ – навигационная подзадача (подзадача выработки линейной скорости движения); ФД – фазовый дискриминатор; ИЭ – исполнительный элемент; ФРНП – блок формирования радионавигационных параметров; ОГ – опорный генератор; Ц.М. – центр масс объекта; вхКА , вхЦМ , вхОГ – фазы, обусловленные движением навигационного космического аппарата (далее космического аппарата), ц. м.
^
объекта и фаза ОГ соответственно; КА , иим – радиальная частота (радиальная скорость), обусловленная движением космического аппарата и центра масс БИИМ; снс –
радиальная частота (радиальная скорость), вырабатываемая ПА СНС и используемая в навигационной подзадаче ССН.
Информационная поддержка следящих измерителей ПА СНС от БИИМ реализуется введением в ССНi оценки радиальной скорости взаимного перемещения НСi и точки размещения АУ ПА СНС. Данная оценка представляет собой скалярное произведение значений вектора линейной скорости точки размещения АУ (формируемых в БИИМ) и вектора направляющих косинусов линии визирования i-го НСi из точки размещения АУ, поступающего из НЗ ПА СНС.
На вход ССН действуют три составляющих динамики изменения фазы, обусловленные следующими тремя факторами:
движением центра масс объекта,
движением КА,
изменением частоты опорного генератора.
Анализ рис. 3.2 показывает, что ФАП ССН представляет собой линейную систему, характеристики которой определяются видом передаточной функции F( p ) .
ССН ПА СНС имеет, как правило, третий порядок астатизма, ССЗ (с учетом поддержки от ССН) – первый порядок астатизма.
В системе ФАП ПА СНС рассматриваемой ИСОН (экспериментального образца) используется фильтр, обеспечивающий третий порядок астатизма.
Передаточная функция F ( p) имеет вид:
F( p ) k1 p2 k2 p k3 p2
где k1= 2 k, k2= 2 k2, k3= k3, |
k 1,2B |
, |
B |
– значение шумовой полосы ФАП |
|
ССН |
|
ССН |
|
(ширина полосы ССН), [рад/с].
Известно, что при наличии обратной связи по скорости в системе слежения за несущей динамическая ошибка может быть существенно уменьшена. Также можно сказать, что такая обратная связь придает фильтру ФАП свойства инвариантности по входному сигналу.
Полосы следящих измерителей в ПА СНС выбираются из компромисса динамической и шумовой составляющих ошибок. Снижение динамической ошибки за счет поддержки от БИИМ позволяет сузить полосу СИ и тем самым снизить шумовую ошибок, то есть повысить помехоустойчивость ПА СНС.
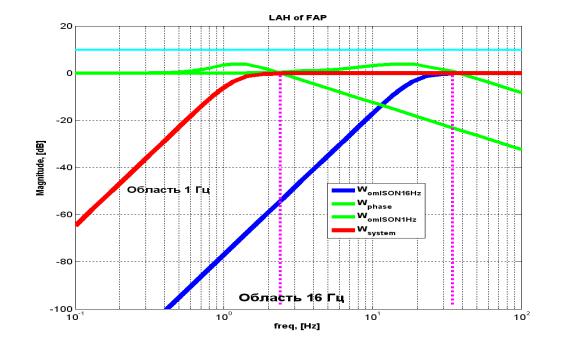
Механизм сужения полосы ССН i-го измерителя поясняет рис. 3.3.
45
Рис. 3.3 – ЛАХ ФАП для входа по фазе и радиальной скорости ИСОН к выходу ФАП
(зеленые линии – ЛАХ ФАП от входа по фазе к выходу ФАП, синяя и красная линии – ЛАХ ФАП от входа по радиальной скорости к выходу ФАП для 16 и 1 Гц
соответственно, бирюзовая линия – сумма ЛАХ сигналов для входа по фазе и амплитуде (для наглядности эта ЛАХ поднята вверх на 10 dB), пунктирные линии – границы областей 1 Гц и 16 Гц)
Из рис. 3.3 видно, что ФАП для входа по фазе к выходу ФАП является фильтром нижних частот, расширение полосы пропускания которого требуется для обеспечения слежения за сигналами наблюдаемых НСi и снижения искажений полезного сигнала.
Однако, одновременно с ростом ширины полосы пропускания увеличивается доля шумовой составляющей в измеряемом сигнале, снижается отношение сигнал/шум. В то же время, введение в ФАП дополнительной информации об относительной радиальной скорости (получаемой от БИИМ) позволяет существенно сократить полосу ФАП, практически устранив динамические искажения полезного сигнала и снизив влияние шумов измерений.
В то же время ФАП для входа по радиальной скорости от ИИМ к выходу ФАП является фильтром верхних частот, увеличивающим вклад погрешностей БИИМ по линейной скорости при сужении полосы слежения ФАП. Таким образом, существует некая оптимальная по ширине полоса слежения ФАП, при которой достигается существенное подавление шумов ПА СНС при допустимом росте вклада погрешностей БИИМ, что существенно повышает помехоустойчивость ПА СНС.
Величина установившегося значения динамической ошибки, вызванной толчком (Jerk - - вторая производная от скорости, характеризующая изменчивость ускорения) для следящего измерителя с астатизмом 3-го порядка, параметры которого выбраны по критерию минимума дисперсии шумовой ошибки для заданного уровня динамической ошибки [13 - Стиффлер Дж], определяется как
E 3.64 a j /( BСИ3 ) ,
46
где E – установившееся значение динамической ошибки (рад); a j – величина толчка
(м/c3); – длина волны несущего колебания сигнала (м); BСИ3 – шумовая полоса
следящего измерителя (Гц).
В [47] было показано, что при наличии информационной поддержки для ПА СНС динамическая ошибка ССН, вызванная толчком Jerk, может быть существенно уменьшена. При малых транспортных задержках снижение динамической ошибки достигает K-1 раз, где K= V/V – относительная погрешность информационной поддержки, V – значение погрешности информационной поддержки.
Так в [47] было показано, что в ИСОН с БИИМ на микромеханических датчиках с уровнем шума 0.02 м/с2/Гц и 0.05 º/с/ Гц удается достичь снижения уровня шума в 5-6 раз.
Результаты испытаний
При испытаниях экспериментального образца ИСОН на автомобиле при его движении в городских условиях имитировалась работа интегрированной сильносвязанной системы в условиях управляемого полета высокоманевренного объекта вблизи поверхности Земли. При этом на маршруте движения (рис. 5.2а) имели место в ПА СНС (разработка РИРВ) частые срывы слежения за навигационными спутниками ( НСi ) и
«сбои» в первичных измерениях ПА СНС, обусловленные маневрированием автомобиля и затенением приемной антенны.
Исходные данные:
запись массива данных ИБ (текущих значений сигналов ММГ и ММА) БИИМ производилась на частоте 100 гц;
формирование откорректированных значений (с учетом поправок на тропосферную и ионосферную задержки, с учетом сдвига шкал времени НСi и ПА СНС)
дальностей и приращений дальностей на шаге измерений, а также эфемеридной информации для каждого из 6-ти наблюдаемых НСi осуществлялось на частоте 10 гц с привязкой всех данных к синхроимпульсу от ПА СНС;
отбраковка недостоверных измерений от ПА СНС производилась в соответствии с критерием (5.20);
Результаты решения навигационной задачи в реальном времени приведены на рис. 5.2а и рис.5.2г.

47
Рис. 5.2а (здесь: крас.- навигационное решение от ПА СНС; син. – от ИСОН по слабосвязанной
схеме)
48
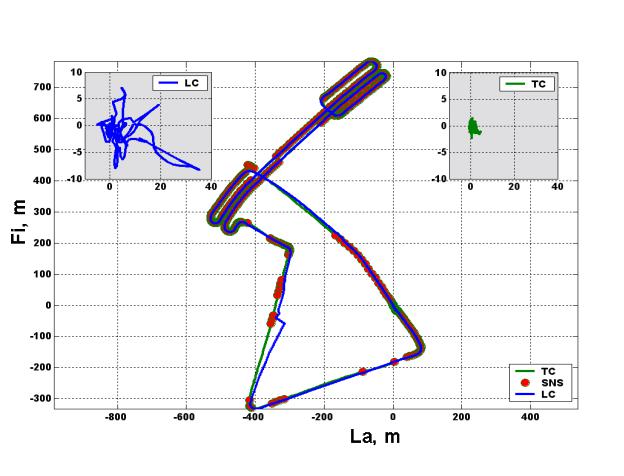
Рис.5.2б
(здесь: LC - данные ИСОН по слабосвязанной схеме; TC - данные ИСОН по сильносвязанной схеме)

49
Рис.5.2в. Геометрический фактор для наблюдаемых НС
N
Рис.5.2г. Траектория движения
50
Для отработки и экспериментальной проверки алгоритма и аппаратнопрограммной платформы информационной поддержки по скорости ПА СНС от БИИМ в рамках экспериментальных исследований ИСОН был выполнен ряд специальных динамических испытаний в условиях циклического действия перегрузок. Движение автомобиля осуществлялось сначала по замкнутой трассе большого радиуса, а затем по окружности малого радиуса с максимально возможной в условиях эксперимента скоростью (рис. 5.2г).
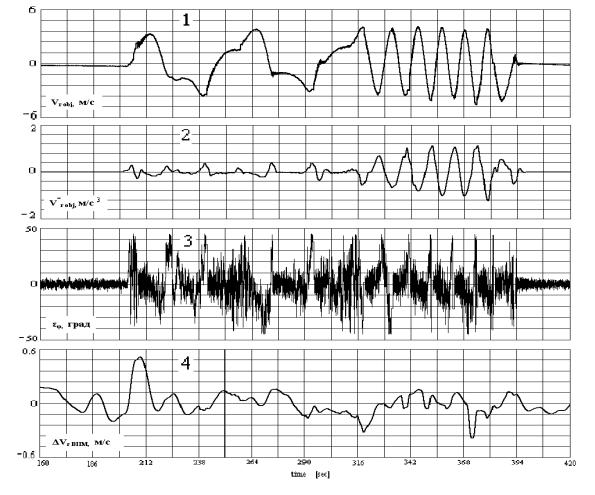
Результаты, характеризующие работу ССН МПВ1 при динамических испытаниях, приведены на рис. 5.3. На рис. 5.3а представлена узкополосная ССН (ВССН = 2 Гц) для случая отсутствия поддержки ПА СНС от БИИМ, на рис. 5.3б та же ССН при наличии поддержки от БИИМ (где 1- составляющая радиальной скорости, обусловленная движением объекта, 2 - составляющая радиального толчка (Jerk), обусловленная движением объекта, 3- выход фазового дискриминатора ССН, 4- радиальная составляющая скоростной погрешности БИИМ).
Как видно из рис. 5.3а на участках трассы, соответствующих экстремальным значениям динамического воздействия (толчка), в ССН без поддержки от БИИМ возникают срывы слежения, а ССН с поддержкой в аналогичных условиях слежения за сигналом не теряет (рис. 5.3б).
Полученные в ходе экспериментов количественные оценки погрешностей ССН и БИИМ соответствуют ожидаемым расчетным показателям.
Рис. 5.3а. ССН без скоростной поддержки от БИИМ