

L1a_Mag
.pdf31
Погрешности ИСОН
1
2
Рис.4.1в. Погрешности (угл.мин) ориентации (1), K(2) при отсутствии отстояния блока акселерометров БИИМ от центра масс объекта
2
1
Рис.4.1г. Погрешности (угл.мин) ориентации (1), K(2) при наличии отстояния блока акселерометров БИИМ от центра масс объекта
32
3
1 2
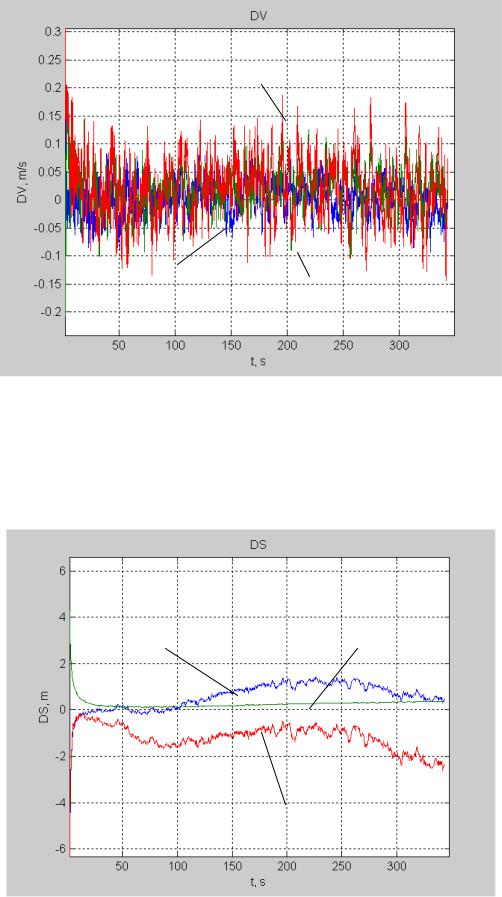
Рис.4.1д. Погрешности (м/с) по относительной линейной скорости
VE (1), VN (2), VH (3)
1 |
2 |
3
Рис.4.1е. Погрешности (м) по координатам (1), (2), h(3)
33
1
2
3
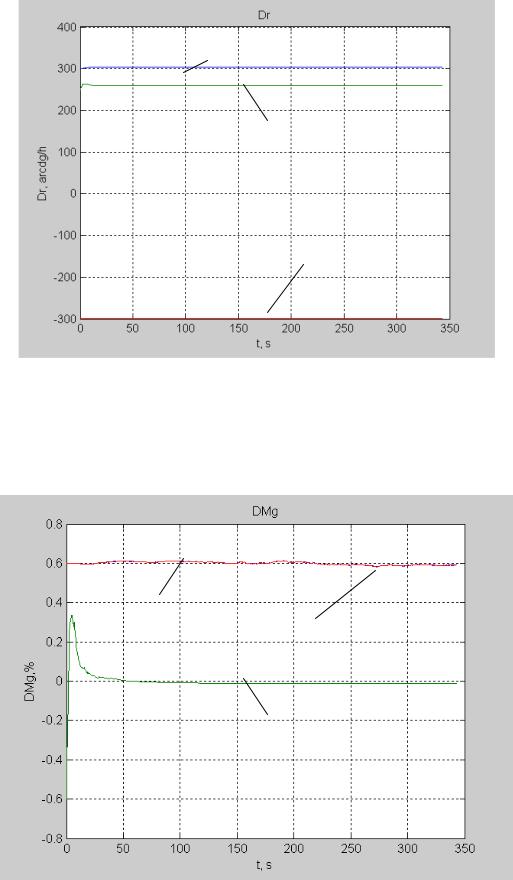
Рис.4.1ж. Ошибки (0/ч) оценки систематических дрейфов ММГ |
||
~ |
~ |
~ |
xb (1), |
yb (2), |
zb (3) |
1
3
2
Рис.4.1з. Ошибки (%) оценки погрешностей масштабных коэффициентов ММГ |
||
~ |
~ |
~ |
Mgx (1), |
Mgy (2), |
Mgz (3) |
34
3 |
2 |
|
1 |
2 |
~ |
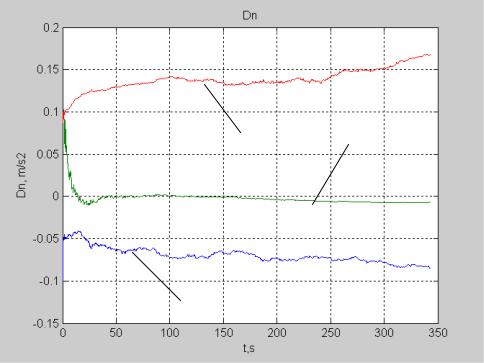
Рис.4.1и. Ошибки (м/с ) оценки смещений нулей ММА axb
4.2. Движение ОУ в атмосфере в условиях управляемого спуска
Начальные условия по параметрам движения (рад; м; м/с):
0 =700*pi/180; 0 =1150*pi/180; ho=3*105 (м);
~ |
~ |
(1), ayb (2), |
azb (3) |
h_dop1=1.5*105 (м) - высота, с которой начинается торможение в атмосфере; h_dop=1*105 (м) - высота, с которой начинается торможение и управление (от рулей);
Vo=5000 (м/с); Wto=1 (м/с2);
dWt=0.1 (м/с2) - уровень ускорения (торможения) в атмосфере;
Wupo_H=300 (м/с2) – максимальный уровень ускорения (торможения) от рулей;
K (t) A |
|
|
K |
r |
sin( |
t |
K |
) ; A |
1160*pi/180; K |
r |
; |
|
K |
900*pi/180; |
||||
or |
|
|
|
k |
|
or0 |
|
|
|
|
|
|
||||||
60*pi/180; |
|
k |
0.5..1.0 рад/с; |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t) cm |
r sin(k t ) ; |
cm 0 |
-600*pi/180; |
r |
; 00 ; |
|||||||||||||
0 =0 |
0 |
*pi/180; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
8...10 (рад/с); |
|
|
|
|
|
|
|
||||||||||
При h ≤ h_dop1 (с началом торможения в атмосфере) амплитуда конического движения уменьшается постепенно до 00.
ТТХ ИБ БИИМ:
смещения нулей (остаточные) акселерометров (MMA)
axb =-0.01 (м/с2); |
a yb =0.01 (м/с2); |
azb =0.01 (м/с2); |
смещения нулей (остаточные) гироскопов (ММГ)
xb =60*5e-6 (рад/с); yb =100*5e-6 (рад/с); zb =-30*5e-6 (рад/с);
начальные погрешности
|
0 |
=-20*pi/180; |
|
0 |
=20*pi/180; |
|
0 |
=-20*pi/180; |
|
|
|
|
|
|
35
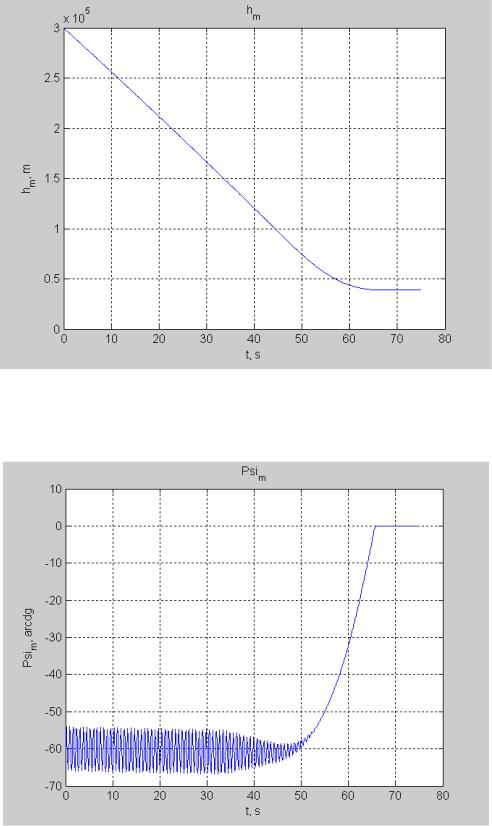
Рис.4.2а. Изменение высоты (м) баллистической траектории (при изменении азимута от 1160 до 1200)
Рис.4.2б. Изменение угла тангажа (град.) баллистической траектории (с учетом демпфирования в атмосфере конического движения)
36
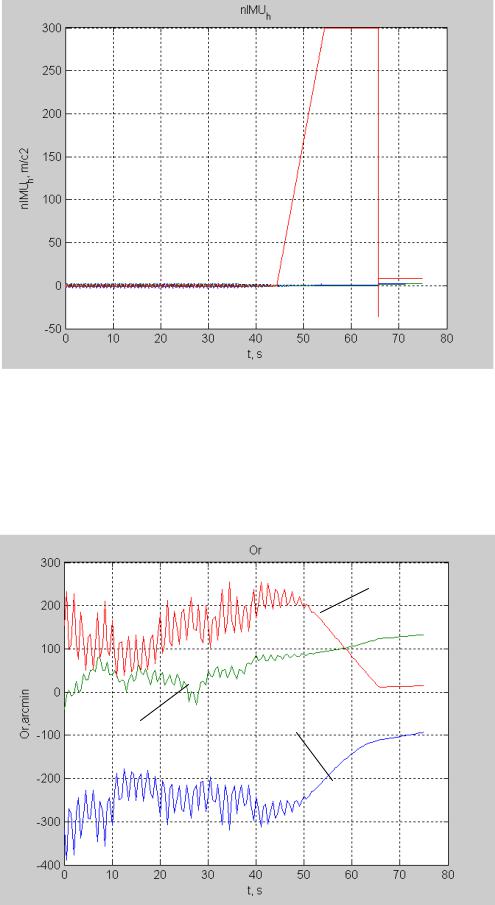
Рис.4.2в. Ускорения (м/с2) от управления движением ц.м. ОУ, измеряемые акселерометрами
Погрешности ИСОН а) режим работы: обсервационный режим по 6 НС - 42 с (до резкого торможения),
затем автономный режим
3
2 |
1 |
Рис.4.2в. Погрешности (угл.мин) ориентации (1), (2), K(3)
37
2
3
1
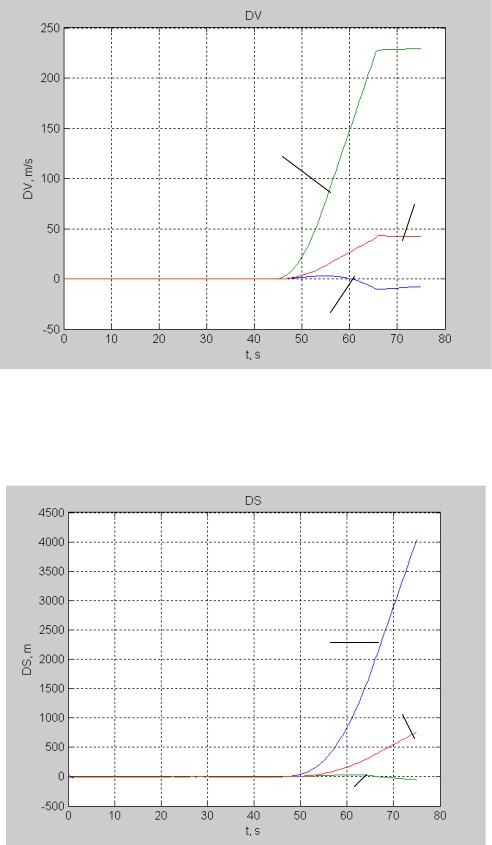
Рис.4.2г. Погрешности (м/с) по относительной линейной скорости
VE (1), VN (2), VH (3)
1
3
2
Рис.4.2д. Погрешности (м) по координатам (1), (2), h(3)

38
б) режим работы: обсервационный режим №2 по 6-и НС - 42 с, затем автономный режим – 10 с, затем с 52 с - обсервационный режим №2 по 3-м НС
3 
2 |
1 |
Рис.4.2в. Погрешности (угл.мин) ориентации (1), (2), K(3)
3
2 1
Рис.4.2г. Погрешности (м/с) по относительной линейной скорости
VE (1), VN (2), VH (3)

39
3 2
1
Рис.4.2д. Погрешности (м) по координатам (1), (2), h(3)
5. Результаты стендовых и объектовых испытаний экспериментального образца ИСОН Результаты стендовых испытаний
В условиях стенда имитировалась работа ИСОН в обсервационном режиме на баллистической траектории полета объекта (т.е. в условиях отсутствия в сигналах ММА ИБ БИИМ значений ускорения силы тяжести Земли).
Исходные данные:
опытный образец БИИМ на микромеханических гироскопах и акселерометрах
(разработка ЦНИИ «Электроприбор») был установлен на стенде ф. «Acutronic» и вращался вокруг вертикальной оси с угловой скоростью 8000/c;
отстояние ИБ БИИМ от оси вращения:
x0 0.08 м; y0 0 м;
запись массива данных ИБ (текущих значений сигналов ММГ и ММА) БИИМ производилась на частоте 100 гц, (при этом из сигналов ММА были исключены проекции ускорения силы тяжести Земли);
полагаем, что в точке размещения блока ММА установлена приемная антенна СНС (формировались имитационные данные ПА СНС);
осуществлялась камеральная обработка данных в пакете Matlab(Simulink).
40
Автономный режим работы
 nH
nH
nE |
nN |
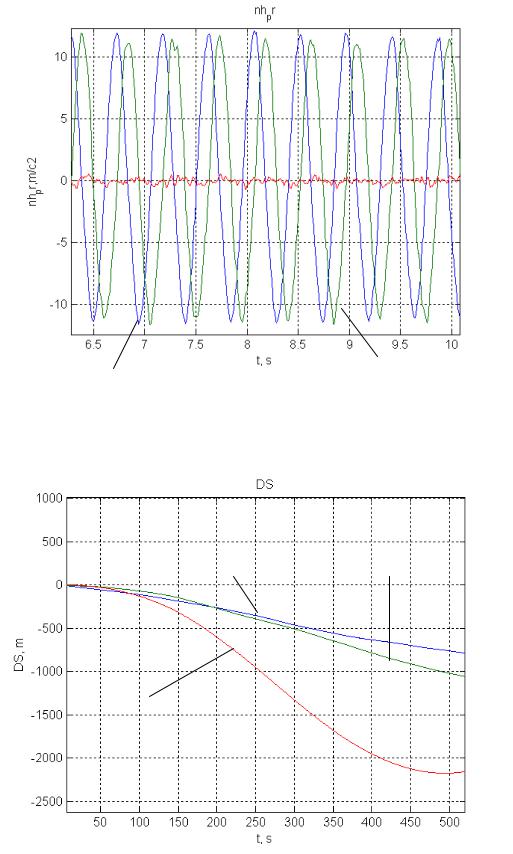
Рис.5.1а. Линейные ускорения (м/с2), измеряемые акселерометрами, в проекциях на географические оси (из-за вращения объекта =8000/с и отстояния ИБ от ц.м. ОУ)
1 |
2 |
3
Рис. 5.1б. Погрешности (м) ИСОН по координатам (1), (2), h(3)