

L1a_Mag
.pdf
|
|
11 |
|
|
|
N |
|
in 3, e3, m 3 |
|
||
|
|
|
|
H |
|
|
|
|
|
m2, E |
|
|
|
|
|
||
t p(t0) (t t0) |
|
O |
|
|
|
|
|
|
e2 |
||
|
|
|
|
* |
|
in1 |
|
|
|
in2 |
|
|
|
|
|||
e1 |
|
|
|
m1 |
|
|
|
|
|
|
|
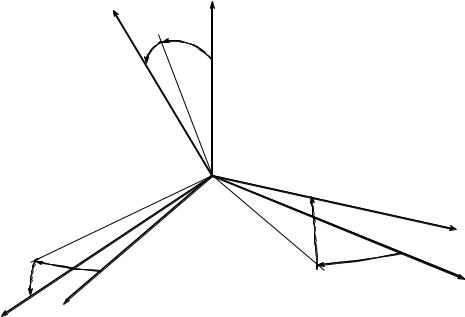
Рис.2.3. Ориентация географического трехгранника ENH относительно системы |
|||||
|
координат Oee1e2e3 |
|
|
|
|
Ориентация связанной |
с объектом системы |
координат xo yo zo |
относительно |
||
трехгранника ENH задается тремя углами Крылова (рис.2.4): - курсом, - углом продольных колебаний (угол тангажа) и - углом боковых колебаний (угол крена) либо матрицей Cho направляющих косинусов
|
|
cosK cos sin K sin sin |
sin K cos |
cosK sin sin K sin cos |
|
|
|
o |
|
|
|
|
|
|
|
Ch |
|
sin K cos cosK sin sin |
cosK cos |
(sin K sin cosK sin cos ) . |
(2.3) |
||
|
|
|
cos sin |
sin |
cos cos |
|
|
|
|
|
|
|
|
|
|
либо кватернионом Lho Lhb Lbo , где Lbo - кватернион привязки осей измерительного блока БИИМ к осям объекта.
12
zo H
|
O |
yo |
|
|
|
||
|
|||
|
|||
|
|
N |
|
xo E |
|
||
|
|
Рис.2.4.
Параметры поступательного движения ц.м. объекта – навигационные параметры (составляющие вектора линейной скорости относительно инерциального пространства в проекциях на оси географического сопровождающего трехгранника и оси гринвичской навигационной системы координат ПЗ-90, а также географические и декартовые координаты) формируются интегрированием кинематических уравнений поступательного
движения путем задания соответствующих начальных условий Co (t |
|
|
|
|
|
, |
|
, h |
|
0 |
) , V |
(t ) , |
0 |
0 |
0 |
||||
h |
h |
0 |
|
|
|
иследующих линейных ускорений в проекциях на географические оси:
на баллистической траектории:
|
|
|
|
|
|
|
||
- ускорения от силы тяжести - ge _ h [0,0, ge ]T |
|
|||||||
g |
e |
( , h) |
g0a2 |
[1 sin2 |
1 |
e2 sin2 2 ] , [Бромберг] |
|
|
(a h)2 |
|
|
||||||
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
|||
где g0 =9.78049 – ускорение силы тяжести на экваторе земного эллипсоида (м/с2); |
||||||||
=0.005317 (безразмерная величина, имеет порядок малости ); a, b |
– большая и малая |
|||||||
полуоси эллипсоида вращения Земли; |
e2 (a2 b2 ) / a2 2 2 |
– квадрат первого |
||||||
эксцентриситета эллипсоида вращения Земли; (a b) / a - сжатие; |
|
|||||||
(параметры общеземного эллипсоида ПЗ-90: |
|
|||||||
a =6378136 (м); |
=1/298.25784; |
R =6378163 - средний экваториальный радиус |
||||||
Земли, (м); U =7.2921151467e-5 - угловая скорость суточного вращения Земли (рад/с))
-кориолисова ускорения - Wcor _ h ( h Uh ) Vh ;
на траектории спуска объекта в плотные слои атмосферы:
|
|
|
|
- ускорения от силы тяжести ge _ h [0,0, ge ]T ; |
|
||
|
|
|
|
- кориолисова ускорения - Wcor _ h ( h |
Uh ) Vh ; |
||
- торможения корпуса в атмосфере - Wt _ h ;

13
- ускорения от аэродинамических сил при использовании крыльев и рулей управления -
Wup _ h .
Могут быть заданы также линейные вибрации объекта и аномалии гравитационного поля. Составляющие вектора линейной скорости относительно Земли формируются как
|
|
t |
|
|
|
|
|
||||
Vh _ cm (t) Vh _ cm (t0 ) (ge _ h Wcor _ h Wt _ h )d , |
(2.4) |
||||
t0
аугол тангажа для вектора линейной скорости ц.м. на баллистической траектории
cm arcsin(VH _ cm /Vh ) .
Текущие значения (истинные) координат местоположения ц.м. объекта формируются как
_ cm (t)
_ cm (t)
h_ cm (t)
t |
V |
N _ cm |
( ) |
|
|
|
|
_ cm (t0 ) |
|
|
d , |
|
|
||
|
|
|
|
||||
|
R ( ) |
|
|
||||
t0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
VE _ cm ( ) |
|
|
|||
_ cm (t0 ) |
|
|
d , |
||||
R ( ) cos |
m |
( ) |
|||||
t0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
h_ cm (t0 ) VH _ cm ( )d , |
|
(2.5) |
|||||
t0 |
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
R |
a(1 e2 ) |
|
h , |
R |
|
a |
h , - радиусы кривизны нормальных |
|
(1 e2 sin2 ) |
32 |
(1 e2 |
sin2 ) 12 |
|||||
|
|
|
|
сечений соответственно в меридиональной плоскости и в плоскости первого вертикала. Вращательное движение объекта (текущие значения параметров ориентации)
формируется путем задания начальных значений углов курса K0 (равен расчетному пеленгу траектории полета объекта), тангажа 0 и крена 0 , и их колебательных составляющих с учетом:
на баллистической траектории:
-быстрого вращения вокруг продольной оси и конического движения относительно ц.м.
K(t) K0 Kr sin(k t K ) , (t) 0 cm r sin(k t ) ;
где Kr , |
r , |
0 |
0 |
; |
k 0.7 |
0 |
, |
0 |
0 |
|
(рад/с); |
5 ...6 |
|
рад/с; K 90 |
|
; 8.7 |
на траектории спуска объекта – возможно различное маневрирование по курсу,
тангажу и крену. |
|
|
|
|
|
|
|
|
Текущие (истинные, модельные) значения навигационных параметров точки |
||||||||
размещения ИБ БИИМ на объекте формируются с учетом ее отстояния x0 , y0 , z0 |
T |
|||||||
|
[ |
|
, |
|
, |
|
]T угловой скорости объекта: |
|
от ц.м. объекта и значений вектора |
xo |
yo |
zo |
|
||||
o |
|
|
|
|
|
|||
для составляющих вектора относительной линейной скорости в проекциях на
связанные с объектом оси |
|
|
|||||
|
|
|
|
|
|
|
|
V |
V |
( |
U |
o |
) , где V |
Ch V |
; |
o |
o _ cm |
o |
|
o _ cm |
o h _ cm |
|
|
и оси географического сопровождающего трехгранника
|
|
|
V |
Co V |
; |
h _ m |
h o |
|
для составляющих вектора абсолютной линейной скорости (т.е. относительно инерциального пространства) будем иметь

14
VaE _ m VE _ m R U cos m ; VaN _ m VN _ m ; VaH _ m VH _ m ,
|
[e |
, e |
, e |
]T Ch |
|
|
[V |
|
|
]T ; |
V |
V |
; где V |
,V |
,V |
||||||
ae _ m |
1m |
2m |
3m |
e _ m |
ah _ m |
ah _ m |
aE _ m |
aN _ m |
aH _ m |
|
для координат местоположения объекта
|
|
|
|
SN |
, |
|
m |
|
_ cm |
|
S E |
, |
|
m |
_ cm |
R cos |
|||||||||||
|
|
R |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
hm h_ cm SH , |
|
|
|
|
|
|
|
(2.6) |
|||||
где [ SE , SN , SH ]T Cho x0 , y0 , z0 T . |
|
||||||||||||
Истинные (модельные) значения декартовых координат e1, e2 , e3 (проекций радиус-
вектора R объекта на гринвичские оси Oee1e2e3 ) получим из следующих соотношений: e1m (N h) cos m cos m , e2m (N h) cos m sin m ,
e |
[N(1 e2 ) h |
]sin |
m |
, |
(2.7) |
||||
3m |
|
|
m |
|
|
|
|||
где N |
|
|
a |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
 1 e2 sin2
1 e2 sin2
На выходе имитационной (восстанавливаются из кинематических значения векторов угловой скорости БИИМ на объекте.
модели движения объекта формируются параметров движения объекта) текущие истинные и кажущегося ускорения точки размещения ИБ
|
[ |
|
, |
|
, |
|
]T |
угловой скорости вращения ИБ БИИМ |
Вектор |
xb |
yb |
zb |
|||||
b m |
|
|
|
|
|
относительно инерциального пространства формируется из кинематического уравнения
[1]:
b |
|
|
b |
|
|
|
b |
|
|
|
b |
T |
|
b |
|
|
|
|
|
|
|
(2.8) |
||
Cin _ m |
Cin _ m b _ m , Cin _ m (t0 ), |
b _ m (Cin _ m ) |
|
Cin _ m , |
|
|
|
|
||||||||||||||||
|
|
|
0 |
zb |
yb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
zb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где b _ m |
|
|
0 |
|
|
xb |
- |
кососимметрическая |
|
матрица, |
соответствующая |
|||||||||||||
|
|
|
|
xb |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
угловой скорости вращения трехгранника |
x |
|
|
y |
|
z |
|
; |
Cb |
|
(t |
|
) - начальное |
|||||||||
вектору |
b _ m |
b |
b |
b |
|
0 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
in _ m |
|
|
||||||||
значение матрицы Cb |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
in _ m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как ИБ БИИМ жестко установлен в осях объекта, то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Cb |
|
Ch |
Co |
|
Cb , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.9) |
||
in _ m |
|
in _ m |
h _ m |
|
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Cob - матрица привязки осей ИБ к осям объекта.
Матрица Co |
формируется по заданным значениям параметров K(t),(t),(t) |
согласно |
||||||||||||||
h _ m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выражению |
(2.3), |
а |
|
|
матрица |
Ch |
- |
по текущим значениям |
|
m |
, |
|||||
|
|
|
|
|
|
|
|
|
|
in _ m |
|
|
|
|
|
|
m m U (t t0 ) tgr (t0 ) |
|
согласно |
(2.2), |
где |
вместо координаты m |
следует |
||||||||||
использовать m . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор |
|
[n |
|
, n |
|
, n |
|
]T |
кажущегося |
ускорения (измеряемый |
|
блоком |
||||
n |
xb |
yb |
zb |
|
||||||||||||
|
b m |
|
|
|
|
|
|
|
|
|
|
|
|
|||
акселерометров) в месте установки ИБ БИИМ при допущении, что объект является абсолютно жестким, может быть представлен виде:
ncm _ h
no _ m
|
|
|
|
|
|
|
|
o |
T |
|
|
|
W |
|
|
AGP, |
(C |
; |
|||||
V |
|
g |
e _ h |
n |
) |
|
n |
||||
cm _ h |
cor _ h |
|
|
cm _ o |
|
h |
|
cm _ h |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
ncm o o |
o ( o ) |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
15
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
(2.10) |
||
n |
|
Con |
|
|
|
|
|
|
|
|
|
|
|
|||||||
b m |
|
|
b |
o m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
[0,0, g |
|
]T ; AGP - аномалии гравитационного поля |
||||||
где W |
|
( |
U |
h |
) V ; |
g |
e _ h |
e |
||||||||||||
cor _ h |
|
|
|
h |
|
|
|
|
h |
|
|
|
|
|
|
|
||||
|
[ |
|
|
, |
|
|
, |
|
T |
- вектор угловой скорости вращения объекта |
|
C |
b |
|
||||||
Земли; |
xo |
yo |
zo |
] |
|
|
; |
|||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
o |
o |
b |
||||||
[ x , y , z ]T |
- радиус-вектор, характеризующий отстояние ИБ БИИМ от ц.м. объекта в |
|||||||||||||||||||
связанных осях xo yo zo . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1.3. Формирование выходных данных ИБ БИИМ |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Текущие значения |
векторов |
|
b m , nb m |
|
(из задачи имитационного моделирования |
|||||||||||||||
движения |
объекта) |
|
суммируются |
либо с массивами данных стендовых испытаний |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гироскопов |
|
и |
|
акселерометров либо с |
динамическими моделями b , |
nb |
их |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
погрешностей, реализуя, тем самым, виртуальные приборные значения Gb , |
nb _ pr данных |
|||||||||||||||||||
ИБ БИИМ с учетом динамики движения объекта.
|
|
|
|
Gb b m b ; |
|
||
|
|
|
|
nb pr nb m nb . |
(3.1) |
||
1.4. Дискретные рекуррентные алгоритмы основных функциональных задач БИИМ Предварительная обработка данных линейных акселерометров (ЛА) и гироскопов (ВОГ или ММГ)
Алгоритм задачи, решаемой с дискретностью dt (оператор i ) внутри рабочего цикла dT :
b1a (i 1) b1a (i) na _ pr (i 1)dt ; |
|
|
b2a (i 1) b2a (i) (b1a (i 1) b1a (i))dt / 2 ; |
при i 0 |
b1a (i) 0; b2a (i) 0; |
в конце цикла dT (оператор j ) получаем значения первых и вторых интегралов в осях чувствительности ЛА на шаге dT :
b1a ( j 1) b1a (i 1) , b2a ( j 1) b2a (i 1) ;
-учет паспортных значений смещений нулей, погрешностей масштабных коэффициентов
ипривязки измерительных осей ЛА к осям ИБ
b1b ( j 1) Cba [(E Ma0 )b1a ( j 1) a0dT ] ;
b2b ( j 1) Cba [(E Ma0 )b2a ( j 1) a0 (dT )2 / 2];
где Ca - матрица привязки измерительных осей ЛА к осям ИБ (учет неортогональностей); |
|||||||||||
b |
|
|
|
|
|
|
|
|
|
|
|
- учет оценок из фильтровой задачи |
|
|
|
|
|
|
|
||||
b1 ( j 1) b1 |
( j 1) aˆ |
b |
( j)dT , b2 |
b |
( j 1) b2 |
b |
( j 1) aˆ |
( j)dT 2 / 2 , |
(4.1) |
||
b |
b |
|
|
|
|
b |
|
|
|||
где aˆb |
- текущие значения оценок смещений нулей ЛА, поступающие из фильтровой |
||||||||||
задачи; |
|
|
|
|
|
|
|
|
|
|
|
для ВОГ (ММГ): |
|
|
|
|
|
|
|
|
|
||
f g (i 1) f g (i) (Gg (i 1) Gg (i))dt / 2 , |
при i 0 f g (i) 0; |
|
|||||||||
в конце цикла dT (оператор |
j ) |
|
|
|
|
|
|
|
|||
f g ( j 1) f g (i 1) ; |
|
|
|
|
|
|
|
|
|
||
-учет паспортных значений смещений нулей, погрешностей масштабных коэффициентов
ипривязки измерительных осей ВОГ (ММГ) к осям ИБ
fb ( j 1) Cbg [(E M g0 ) f g ( j 1) g0dT ] ;
|
|
|
|
|
|
16 |
|
где C g |
- |
матрица |
привязки |
измерительных осей гироскопов |
к осям ИБ (учет |
||
b |
|
|
|
|
|
|
|
неортогональностей); |
|
|
|
|
|
||
- учет оценок из фильтровой задачи |
|
|
|
||||
|
|
ˆ |
0 |
0 |
|
|
|
|
M gx |
|
|
||||
|
|
|
ˆ |
|
|
ˆ |
|
fb ( j 1) |
E 0 |
0 |
|
(4.2) |
|||
M gy |
fb ( j 1) bdT , |
||||||
|
|
|
|
ˆ |
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
M gz |
|
|
|||
ˆ |
ˆ |
- текущие значения |
оценок погрешностей масштабных |
|
где M gi (i x, y, z) , |
b |
|||
коэффициентов и смещений нулей дрейфов ВОГ(ММГ) в осях |
xb yb zb , поступающие из |
|||
фильтровой задачи; |
|
|
|
|
Задача пространственной ориентации объекта |
|
|
||
(входная информация: |
Lhb0 |
- начальное значение |
кватерниона |
ориентации из задачи |
начальной выставки; |
fb ( j 1) - от блока гироскопов после предварительной обработки; |
||||||||
|
E _ |
N _ |
H _ T |
|
|
|
|
|
|
h _ ( j) |
- |
значения вектора |
угловой |
скорости географического |
|||||
|
|
|
|
|
|
|
ˆ |
ˆ |
T |
|
|
|
|
|
|
|
|
|
|
трехгранника |
ENH - |
из навигационной задачи; |
h ( j) [ , ˆ, ˆ ] - оценки погрешностей |
||||||
ориентации из фильтровой задачи) |
|
|
|
||||||
Искомый кватернион Lh ( j 1) , определяющий ориентацию измерительного блока |
|||||||||
|
|
|
b |
|
|
|
|
|
|
xb yb zb относительно осей ENH , ищем в виде |
|
|
|
||||||
Lh |
( j 1) F~i ( j 1) H i |
( j 1) |
|
|
|
||||
b |
|
h |
|
b |
|
|
|
|
|
или |
|
|
|
|
|
( j) H i ( j) HH i ( j 1) , |
|
||
Lh |
|
~ |
|
~ |
|
||||
( j 1) FFi ( j 1) Fi |
|
||||||||
b |
|
h |
|
h |
b |
b |
|
|
|
~i |
|
i |
1) приращение кватернионов на шаге dT ; |
||||||
где FFh ( j 1), HHb ( j |
|||||||||
для дискретного алгоритма получим |
|
|
|
||||||
h |
|
~i |
( j 1) |
h |
i |
|
|
(4.3) |
|
Lb |
( j 1) FFh |
Lb ( j) HHb ( j 1) , |
|
|
|||||
Вычисление приращений |
~i |
i |
|
|
|
||||
FFh |
, HHb кватернионов может быть осуществлено |
||||||||
следующим образом. |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
- формирование приращения вектора Эйлера b |
|
|
|
||||||
|
|
Приведем рекуррентный алгоритм задачи ориентации при использовании дискретного |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
y |
z |
Т |
|
алгоритма |
4-го |
порядка |
[2] |
для |
вычисления |
вектора Эйлера |
b |
|
по |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
b |
b |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
квазикоординатам fb ( j |
1) |
и их разностям: |
|
1 f |
|
( j 1) 3 f |
|
( j 1) ..., (4.4) |
|||||||||||||||||||||
|
|
( j 1) f |
|
( j 1) 1 |
f |
|
( j 1) 2 f |
|
( j 1) |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
b |
|
|
|
b |
|
|
|
|
|
|
b |
|
|
|
b |
|
|
|
|
b |
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
24 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где 2 fb ( j 1) |
fb ( j |
1) fb ( j) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
3 |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
fb ( j 1) |
|
fb ( j 1) |
|
fb ( j). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HH |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- формирование кватерниона HH |
HH 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HH |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HH 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
HH0 f3, HH1 |
f4 x |
b |
|
|
j 1 , HH2 |
f4 y |
b |
j 1 , |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
HH3 f4 z |
b |
|
j 1 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
cos b |
j 1 |
|
1 0,5b j 1 2 |
|
0,5b j 1 4 |
|
..., |
|
|
|
|
|
|
(4.5) |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2! |
|
|
|
|
|
|
|
|
|
|
|
|
4! |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 |
|
|
|
b j 1 |
|
|
1 |
|
|
|
|
0,5b j 1 2 |
|
|
|
|
0,5b j 1 4 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
f4 |
|
b |
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
3! |
|
|
|
|
|
|
|
|
|
5! |
... , |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
2 |
j 1 2 |
|
|
|
|
|
j 1 2 |
|
|
|
|
|
|
j 1 2 j 1 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
b |
|
|
|
|
|
|
|
x |
b |
|
|
|
|
|
|
|
|
|
|
|
|
y |
b |
|
|
|
|
|
|
|
|
z |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
по значениям |
|
|
|
- |
|
|
формирование |
|
|
приращения вектора |
Эйлера |
T |
E |
|
N |
|
H |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вектора угловой скорости h _ ( j) |
из задачи преобразования сигналов акселерометров на |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
навигационные оси и первого интегрирования (в соответствии с разложением (4.4)): |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
h ( j) h _ ( j) h ( j) / Tz ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j dT; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
fh ( j |
1) |
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2 f |
h |
( j 1) f |
h |
( j 1) f |
h |
( j) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
1) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
fh ( j 1) |
|
|
|
|
|
fh ( j |
|
|
|
fh ( j). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FF0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
- формирование кватерниона FF |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
FF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FF3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
FF0 f5 , FF1 f6 E j 1 , |
|
FF2 f6 N j 1 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
FF3 f6 H j 1 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
5 |
|
|
|
|
|
|
h |
j 1 |
1 |
|
0,5 |
h |
j 1 2 |
|
|
0,5 |
h |
j 1 4 |
|
..., |
|
|
|
|
|
|
(4.6) |
||||||||||||||||||||||||||||||||||||||
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2! |
|
|
|
|
|
|
|
|
4! |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
1 |
|
|
|
h j 1 |
|
|
|
1 |
|
|
|
0,5 h j 1 2 |
|
|
|
|
0,5 h |
j 1 4 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
f6 |
|
|
h |
|
|
sin |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
3! |
|
|
|
|
|
|
|
|
5! |
... , |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
2 |
j 1 2 |
|
|
j 1 2 |
|
|
j 1 2 |
j 1 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
h |
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
- формирование кватерниона |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
~i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
( j) |
|
|
i |
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.7) |
||||||||||
Lb ( j 1) _ |
FFh ( j 1) |
|
|
Lb |
HHb ( j 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
при |
|
j 0 |
|
Lh ( j) Lh |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
b0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
- коррекция нормы кватерниона |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
L( j 1) L( j 1) _ 0,5ML( j 1) _, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
где M 1 |
|
|
|
L _ |
|
|
|
2 , |
|
|
|
L _ |
|
|
|
|
2 |
L |
|
|
2 |
L |
|
2 L |
|
2 |
L |
2 |
– норма кватерниона. |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 _ |
|
|
|
1 _ |
|
|
|
|
|
|
2 _ |
|
|
|
3 _ |
|
|
|
|
|
|
|
|
||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- формирование матрицы направляющих косинусов Cb |
j 1 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
L2 L2 |
L2 |
L2 |
2 L L L L |
|
|
|
2 L L L L |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
0 |
|
1 |
|
2 |
|
|
3 |
1 |
2 |
|
|
0 |
3 |
|
|
|
0 |
2 |
1 |
3 |
|
|
|
|
|
|
|
|
|
|
||||
Chb |
2 L0 L3 L1L2 |
|
L20 L22 L12 L23 |
2 L2 L3 L0 L1 |
|
|
; |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
2 L L L L |
|
2 L L L L |
|
|
|
L2 |
L2 L2 |
L2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
1 |
3 |
0 |
|
2 |
|
0 |
1 |
|
|
2 |
3 |
|
|
0 |
|
3 |
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
- формирование углов , , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
d11 |
|
d12 |
d13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Co d |
21 |
|
d |
22 |
d |
23 |
|
C bCo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
h |
|
|
|
|
|
|
|
h b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
d |
31 |
|
d |
32 |
d |
33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
cosK cos sin K sin sin |
|
sin K cos |
|
cosK sin sin K sin cos |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin K cos cosK sin sin |
|
cosK cos |
|
(sin K sin cosK sin cos |
; |
|||||||||||||||||||||||||||||||
|
|
|
|
cos sin |
|
|
|
|
|
sin |
|
|
|
|
cos cos |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Co |
- матрица привязки осей |
x |
b |
y |
b |
z |
b |
ИБ БИИМ к осям |
x |
o |
y |
o |
z |
o |
объекта. |
|||||||||||||||||||||
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Из элемента d 32 находим выражение для угла тангажа (килевой качки) :
arctg |
|
d32 |
|
; |
|
|
|
|
|||
1 d 2 |
|||||
|
|
|
|||
|
32 |
|
|
||
Элементы d31 и d33 позволяют определить угол крена (бортовой качки) :
arctg d31 .
d33
(4.8)
(4.9)
(4.10)
Поскольку модули углов и меньше |
, то приведенные выше |
||
|
2 |
|
|
выражения однозначно определяют значения углов килевой и бортовой |
|||
качек. |
|
|
|
Для нахождения соотношения, однозначно определяющего курс |
, |
||
воспользуемся элементами матриц d12 , d22 и функцией Matlab atan2: |
|
||
K a tan 2(d12 / d22 ) |
|
|
|
при a tan 2(d12 / d22 ) 0 , |
K a tan 2(d12 / d22 ) 2 . |
|
(4.11) |
Задача преобразования сигналов акселерометров на навигационные оси и первого интегрирования
(входная информация: Vh0 - начальное значение; b1b ( j 1), b2b ( j 1) - от блока ЛА после
предварительной обработки; |
Cb ( j 1) - из задачи ориентации; |
|
|
( j 1) |
[0,0, g |
|
]T |
- из |
|||||||
g |
h |
e |
|||||||||||||
|
|
|
|
|
|
|
h |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
задачи формирования модели поля силы тяжести Земли; Vh ( j) |
- оценки погрешностей |
||||||||||||||
из фильтровой задачи) |
|
|
|
|
|
|
|
|
|
|
|||||
Алгоритм задачи [1]: |
|
|
|
|
|
|
|
|
|
|
|||||
- формирование «вредных» ускорений |
|
|
|
|
|
|
|
||||||||
g |
e |
|
g0a2 |
[1 sin 2 ( j) |
1 |
e2 sin 2 2( j)] (Бромберг); |
|
|
|
|
|
|
|
||
(a h)2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
aBE ( j 1) VH |
( j) 2U ( j) cos ( j) VN ( j) 2U ( j) sin ( j) gE , |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aBN ( j 1) VE |
( j) 2U ( j) sin ( j) VH ( j) ( j) gN , |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aBH ( j 1) gH VE ( j) 2U ( j) cos ( j) VN ( j) ( j),

19
( gE g0 g ; g N g0 g ; gH (ge g) ;)
BA [aBE , aBN , aBH ]T ;
- вычисление составляющих вектора относительной линейной скорости и приращений линейных перемещений в географических осях
Chb ( j 1) (Chb ( j 1) Chb ( j)) / dT ;
Vk _ h ( j 1) Chb ( j 1) b1b ( j 1) Chb ( j 1) b2b ( j 1) ;Vh ( j 1) Vk _ h ( j 1) BA dT ;
Vh ( j 1) |
|
|
|
ˆ |
(4.12) |
|||
Vh ( j) Vh ( j 1) Vh ( j) dT / Tz ; |
||||||||
при |
j 0 |
Vh ( j) Vh0 ; |
|
|
|
|||
[V ,V ,V ]T V ( j 1) ; |
|
|
|
|||||
E |
N |
H |
h |
|
|
|
||
S |
k _ h |
( j 1) Cb ( j 1) b2 |
b |
( j 1) ; |
|
|||
|
|
|
h |
|
|
|||
Sh ( j 1) Vh ( j) dT Sk _ h ( j 1) BA dT 2 / 2 ;
[ SE , SN , SH ]T Sh ( j 1) ;
Задача навигации
(входная информация: |
0 , 0 , h0 - начальные значения координат; |
Sh ( j 1) - из задачи |
|||||||||||||
преобразования сигналов акселерометров и их интегрирования; |
ˆ |
ˆ |
ˆ |
- |
|||||||||||
( j), ( j), h( j) |
|||||||||||||||
оценки погрешностей из фильтровой задачи) |
|
|
|
|
|||||||||||
- вычисление географических координат |
|
|
|
|
|||||||||||
N ( j 1) |
|
|
|
a |
|
|
; R ( j 1) N ( j 1) h( j) ; |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
(1 e2 sin2 |
( j)) 12 |
|
|
|
|
||||||
R ( j 1) |
|
a(1 e2 ) |
|
|
h( j) ; |
|
|
|
|
||||||
(1 e2 |
sin2 ( j)) |
32 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
( j 1) ( j) SN ( j 1) / R ˆ ( j) dT / Tz ; |
|
|
|
|
|||||||||||
( j 1) |
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
||
( j) SE ( j 1) / R cos ( j 1) ( j) dT / Tz ; |
|
|
|
|
|||||||||||
h( j 1) |
|
|
|
|
|
|
|
|
ˆ |
|
|
(4.13) |
|
||
h( j) SH ( j 1) h( j) dT / Tz ; |
|
|
|
||||||||||||
при |
j 0 |
|
( j) 0 ; ( j) 0 ; h( j) h0 ; |
|
|
|
|
||||||||
- вычисление угловых скоростей |
|
|
|
|
|||||||||||
( j 1) VN ( j 1) / R ; |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( j 1) VE ( j 1) /(R cos ( j 1)); |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E ( j 1) ( j 1) ; |
|
|
|
|
|
|
|
|
|||||||
N |
( j 1) (U ) cos ( j 1) ; |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
( j 1) (U ) sin ( j 1) ; |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
H T ; |
|
|
|
|
|
|
|
|
h ( j) E |
|
|
|
|
|
(4.14) |
|
||||||||
- вычисление декартовых координат (составляющих радиус - вектора ц.м. объекта в |
|
||||||||||||||
проекциях на оси гринвичского навигационного трехгранника) |
|
|
|
|
|||||||||||
e1 _ pr (N h( j 1)) cos ( j 1) cos ( j 1) ; |
|
|
|
|
|||||||||||
e2 _ pr (N h( j 1)) cos ( j 1) sin ( j 1) ; |
|
|
|
|
|||||||||||
e |
|
[N (1 e2 ) h( j 1)]sin ( j 1) ; |
|
|
(4.15) |
|
|||||||||
3 _ pr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20
- вычисление составляющих вектора относительной линейной скорости ц.м. объекта в проекциях на оси гринвичского навигационного трехгранника
|
|
|
|
sin |
|
cos |
0 |
|
|
||
Che ( j 1) |
|
|
|
|
|
|
|
|
|
||
sin cos |
sin sin |
cos |
; |
||||||||
|
|
|
cos cos |
|
cos sin |
|
|
|
|||
|
|
|
|
sin |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
[e |
,e |
|
,e |
|
]T (Ce )T V ( j 1) ; |
|
(4.16) |
||||
1_ pr |
2 _ pr |
3_ pr |
|
h |
h |
|
|
|
|||
1.5. Задача совместной обработки с использованием алгоритмов обобщенного фильтра Калмана данных БИИМ и ПА СНС
(входная информация: i _ z , |
i _ z - измеренные и |
откорректированные |
значения |
дальности и радиальной скорости, а также эфемериды |
e ji и e ji ( j 1,2,3 ) |
(значения |
|
декартовых координат и составляющих вектора линейной скорости относительно Земли в проекциях на гринвичские оси) для каждого НСi от ПА СНС; e j _ pr , e j _ pr ( j 1,2,3 ) –
приборные значения координат, составляющих вектора относительной линейной скорости объекта от БИИМ);
Формирование с дискретностью Tz tk 1 tk 0.10.2c по модельным данным движения НСi и объекта и с учетом модели погрешностей ПА СНС измеренных и откорректированных значений дальности и радиальной скорости для каждого НСi
из орбитальной группировки ( i 1...10 )
|
i _ m |
(k 1) sqrt((e |
e |
)2 (e |
e |
)2 (e |
e |
)2 ), |
|
1i |
1m |
2i |
2m |
3i |
3m |
|
|
i _ z (k 1) i _ m (k 1) D ei , |
|
|
|
|
||||
i _ m (k 1) |
1 |
[(e1i e1m )(e1i e1m ) (e2i e2m )(e2i e2m ) (e3i e3m )(e3i e3m )], |
||
|
||||
i _ m |
||||
|
|
(5.1) |
||
i _ z (k 1) i _ m (k 1) D vi , |
||||
|
|
|
|
|
где
D, D - смещения соответственно шкалы времени (в единицах дальности) и частоты опорного генератора (в единицах радиальной скорости) в ПА СНС относительно данных
НСi ;
ei , vi - шумы ПА СНС.
Формирование по данным БИИМ и эфемеридной информации НСi расчетных значений дальности и радиальной скорости для каждого НСi
|
i _ pr |
(k 1) sqrt((e |
e |
|
|
)2 |
(e |
e |
)2 (e |
e |
)2 ), |
|||||||
|
|
|
|
|
1i |
1_ pr |
|
2i |
2 _ pr |
3i |
3 _ pr |
|
|
|||||
i _ pr |
(k 1) |
|
1 |
[(e1i e1 _ pr )(e1i e1 _ pr ) (e2i e2 _ pr )(e2i |
e2 _ pr ) |
|||||||||||||
|
|
|||||||||||||||||
i _ pr |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.2) |
|||
|
|
|
(e3i e3 _ pr )(e3i |
e3 _ pr )], |
|
|
|
|
||||||||||
Формирование измерений |
|
|
|
|
|
|
|
|
||||||||||
z i (k 1) i _ pr (k 1) i _ z (k 1) ; |
|
|
|
|
|
|||||||||||||
z |
(k 1) |
|
|
(k 1) |
|
(k 1) ; |
|
|
|
|
(5.3) |
|||||||
i |
|
|
i _ pr |
|
|
|
i _ z |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||