

L1a_Mag
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
|
|
|
|
|
|
|
|
||
Линеаризация измерений (5.3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
i _ pr (k 1) i _ m (k 1) i _ pr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
i _ m |
(k 1) i |
|
(k 1) e i |
(k 1) e |
i (k 1) e , |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
e1 |
|
|
|
1 |
|
|
e2 |
|
|
|
|
|
|
2 |
|
|
e3 |
|
|
3 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
i _ pr (k 1) i _ m (k 1) i _ pr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
i _ m |
(k 1) |
i |
|
(k 1) e |
|
|
i |
|
(k 1) e |
2 |
|
i |
(k 1) e |
|
(5.4) |
|||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
e1 |
|
|
|
1 |
|
|
e2 |
|
|
|
|
|
|
|
|
e3 |
|
|
3 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
i |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
(k 1) e1 |
|
|
(k 1) |
e2 |
|
|
|
(k |
1) |
e3, |
|
|
|
|
|
||||||||||||||||||
e1 |
|
e2 |
e3 |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
3 |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
z i (k 1) |
|
(k 1) e j D i ; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
j 1 |
e |
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
3 |
|
i |
|
|
|
|
|
|
|
3 |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
z |
|
(k 1) |
|
e |
|
|
(k 1) e |
|
|
|
|
e |
|
(k |
1) e |
|
D |
; |
|
(5.5) |
|||||||||||||||||
i |
|
|
|
|
j |
|
|
|
j |
|
|
j |
|
|
|
|
|
|
|
j |
|
|
i |
|
|
|
|||||||||||
|
|
|
|
|
|
j 1 |
|
|
|
|
|
|
|
|
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где для частных производных получим следующие выражения:
|
i |
(k 1) |
|
e ji |
e j _ pr |
|
|
, |
|
|
|
|
|
|
|
|
|||||
e j |
|
|
|
i _ pr |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
i |
(k 1) |
|
i _ pr (e |
|
e |
|
|
) |
1 |
(e |
|
e |
|
) ; |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ji |
|
|
|
j _ pr |
|
|
|
ji |
|
j _ pr |
|
|
e j |
|
i2_ pr |
|
|
|
|
i _ pr |
|
|
|
|||||||||||
|
j _ pr |
|
|
; |
|
|
|
|
|
|
(5.6) |
||||||||||
i |
(k 1) |
|
|
ji |
e |
|
|
( j 1,2,3 ); |
|
|
|
||||||||||
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
e j |
|
|
|
|
|
i _ pr |
|
|
|
|
|
|
|
|
|
|
|
|
|||
e j , e j ( j 1,2,3) |
- |
погрешности |
БИИМ |
в выработке декартовых координат и |
|||||||||||||||||
составляющих вектора относительной линейной скорости объекта в проекциях на гринвичские оси.
Погрешности e j , e j ( j 1,2,3) БИИМ были представлены через погрешности , , h выработки географических координат места и погрешности VE , VN , VH в
выработке составляющих вектора относительной линейной скорости объекта в проекциях на географические оси.
e1 fe1 _ + fe1 _ + fe1 _ h h ;
e2 |
fe2 _ + fe2 _ + fe2 _ h h ; |
(5.7) |
e3 fe3 _ + fe3 _ h h ; |
|
|
где fej _ , |
fej _ , fej _ h - соответствующие функции связи между |
e j ( j 1,2,3) и |
, , h ; |
|
|
e1 fe1_VE VE + fe1_VN VN + fe1_VH VH + fe1 _ + fe1 _ + fe1 _ h h ;
e |
f |
e2_VE |
V |
+ f |
e2 _VN |
|
V |
+ f |
e2 _VH |
V |
+ f |
+ f |
+ f |
h ; |
|||||||
2 |
|
|
|
|
E |
|
|
N |
|
|
|
H |
e2 _ |
e2 _ |
e2 _ h |
|
|||||
e |
f |
e3 _VE |
|
V |
+ f |
e3 _VN |
|
V |
+ f |
e3_VH |
V |
+ f |
+ f |
+ f |
h ; (5.9) |
||||||
3 |
|
|
|
E |
|
|
|
N |
|
|
|
H |
e3 _ |
e3 _ |
e3 _ h |
|
|||||
где |
f |
|
, |
f |
ej _VN |
, f |
ej _VH |
, |
f |
|
, |
f |
, |
f |
- соответствующие функции связи между |
||||||
|
|
ej _ VE |
|
|
|
|
|
ej _ |
|
|
ej _ |
|
ej _ h |
|
|
|
|
||||
e j ( j 1,2,3) |
|
и VE , VN , VH , |
, , h . |
|
|
|
|
||||||||||||||
22
Расчетная модель погрешностей
При формировании расчетной модели погрешностей ИСОН использовались следующие аппроксимации:
смещения нулей гироскопов i (i xb, yb, zb) и акселерометров ai , изменения систематических составляющих погрешностей масштабных коэффициентов M gi ВОГ (ММГ) и акселерометров M ai от запуска к запуску и их изменчивость в пуске - были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
погрешности D, D ПА СНС были представлены следующей расчетной моделью
d (D) / dt D w1, |
d (D) / dt k 2 w2 , |
|
|
где коэффициент k2 , характеризующий дрейф частоты опорного генератора, был аппроксимирован соответствующим винеровским процессом;
шумы ei , vi ПА СНС аппроксимированы дискретными белыми шумами с известными дисперсиями на частоте 1/ Tz .
Вэтом случае расчетная модель погрешностей ИСОН будет иметь вид
|
xk 1 k 1/ k |
xk k 1 wk , |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.11) |
||||||||
|
zk 1 Hk 1 xk 1 vk 1, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xT V |
E |
V |
N |
V |
H |
h |
xb |
|
yb |
|
zb |
a |
xb |
a |
yb |
a |
zb |
(5.12) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
M gx |
M gy |
M gz |
|
M ax |
M ay |
M az |
D D k2 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- вектор состояния |
системы, |
здесь ,, - погрешности |
( |
- по |
курсу, |
, - в |
||||||||||||||||||
моделировании вертикали места) задачи ориентации в построении географического трехгранника ENH (вычислении матрицы ориентации Chb );
k / k 1 |
- переходная на шаге Tz |
матрица состояния системы (5.11), |
|||
j / j 1 |
En n F(t j ) dT |
1 |
F(t j ) dT 2 ...; |
||
2 |
|||||
|
|
|
|
||
k / j 1 |
j / j 1 k / j ; |
|
|
(5.13) |
|
при j k
k / j 1 k / k 1; - искомое значение переходной матрицы k 1 ;
k / j En n ;
здесь En n |
- |
единичная матрица размерности (24 24) ; j – оператор дискретности на |
||||||||||||
рабочей частоте dT ; |
k |
- оператор дискретности на частоте измерений Tz ; |
|
|||||||||||
F (t j ) fi, |
j , i, j |
|
- матрица динамики системы, соответствующая вектору |
|
||||||||||
1,24 |
|
|||||||||||||
состояния (5.12) модели погрешностей БИИМ и ПА СНС; |
|
|||||||||||||
k 1 |
k 1 dT |
|
|
|
|
|
|
|
|
(5.14) |
||||
- матрица, определяющая влияние вектора входных шумов wk с ковариациями Qk . |
||||||||||||||
H k 1 - матрица измерений, соответствующая уравнениям (5.3)…(5.10). |
|
|||||||||||||
Ковариационный канал ФК |
|
|
|
|
||||||||||
P |
|
|
|
|
P T |
|
|
|
Q T |
, |
|
|||
k / k 1 |
|
k / k 1 k |
|
k / k 1 |
k / k 1 k |
k / k 1 |
|
|
||||||
K |
k 1 |
P |
|
H T |
[H |
|
P |
H T |
R |
] 1, |
|
|||
|
|
k / k 1 |
k 1 |
|
|
k 1 k / k 1 |
k 1 |
k 1 |
|
|
||||
Pk 1 |
[En n Kk 1H k 1 ]Pk / k 1[En n Kk 1H k 1 ]T Kk 1Rk 1K T k 1. |
(5.15) |
||||||||||||
|
23 |
Оценочный канал ФК |
|
xˆk 1 Kk 1zk 1 |
(5.16) |
для составляющих вектора состояния (погрешности выработки параметров ориентации, линейной скорости и координат места), оценки которых на каждом шаге подаются в обратной связи на входы соответствующих интеграторов;
xˆk 1 k / k 1xˆk Kk 1zk 1 |
(5.17) |
для составляющих вектора состояния (дрейфы и погрешности масштабных коэффициентов гироскопов, инструментальные погрешности акселерометров и т.п.), оценки которых на каждом шаге подаются в обратной связи в выходные сигналы соответствующих измерителей;
Выходные данные задачи фильтрации (управления, вырабатываемые в ФК),
подаются в обратную связь:
X(1:24);
X1=X(1:9,1);
X2=X(10:24,1);
Xpr=Fkp(k+1/k)*X(k);
При k=0
Xpr=0;
x1pr=[0;0;0;0;0;0;0;0;0];
Xpr=[x1pr;X2pr];
X(k+1)=Xpr+KF*z(k+1); (5.18)
Выходные данные задачи фильтрации (управления, вырабатываемые в ФК),
подаются в обратную связь:ˆ =X(1,1);
ˆ =X(2,1);ˆ =X(3,1);
FKOr=[ ˆ ; ˆ ; ˆ ] - со знаком «-» и весом 1/Tz (с обнулением управлений через интервал времени Tz) на вход алгоритма задачи ориентации;
ˆE =X(4,1);
V
ˆ
VN =X(5,1);
ˆH =X(6,1);
V
ˆ =X(7,1);ˆ =X(8,1);
ˆ =X(9,1); - со знаком «-» и весом dT/Tz (с обнулением управлений через интервал h
времени Tz) на входы соответствующих интеграторов алгоритма задачи преобразования сигналов акселерометров на навигационные оси и интегрирования;
ˆ |
ˆ |
ˆ |
xb = - X(10,1); yb = - X(11,1); zb = - X(12,1); |
||
ˆ |
ˆ |
ˆ |
axb =X(13,1); |
ayb =X(14,1); |
azb =X(15,1); |
ˆ |
ˆ |
ˆ |
M gx = - X(16,1); M gy = - X(17,1); M gz = - X(18,1); |
||
ˆ |
ˆ |
ˆ |
Max =X(19,1); |
May =X(20,1); Maz =X(21,1); |
|
- со знаком «-» в выходные сигналы соответственно гироскопов и акселерометров; |
||
ˆ |
ˆ |
|
|
|
|
D =X(22,1); D =X(23,1); - со знаком «-» в измеренные и откорректированные ПА GPS
значения дальности и радиальной скорости соответственно для каждого НСi .
24
Критерий отбраковки недостоверных измерений
Вопросу контроля целостности СНС посвящены многочисленные работы. Их обзор приведен в работе [9]. В данной работе использовался известный безынерционный алгоритм контроля, основанный на анализе невязки разностных измерений, т.е. анализе превышения разностных измерений (учитывая факт включения оценок в обратную связь на каждом шаге обработки измерений) допустимым значениям, рассчитываем по текущим значениям ковариационной матрицы Pk / k 1 ошибок оценок фильтра Калмана:
вычисление расчетных значений СКО измерений Zi (с дискретностью Tz ) для каждого НСi
|
Zi(k 1) |
(diag(H |
i(k 1) |
P |
H T |
R |
))1/ 2 , |
(5.19) |
|
|
k / k 1 |
i(k 1) |
k 1 |
|
|
где Zi [z i ; z i ] , Hi - матрица измерений с ненулевыми строками для конкретного
НСi ; diag - функция, формирующая диагональные элементы соответствующей матрицы;
отбраковка недостоверных измерений при условии
|
Zi(k 1) |
kz Zi(k 1) , |
(5.20) |
для некоторой строки вектора Zi |
измерений, где kz 4...6 , |
||
осуществляется отбраковка недостоверных измерений.
2. Аналитические решения для погрешностей автономного режима работы ИСОН на конечном интервале времени
По параметрам ориентации
При разложении в степенной ряд погрешностей (t), (t), (t) БИИМ в решении задачи ориентации для автономного режима работы на конечном интервале времениt t t0 получим следующие приближенные решения:
(t, t0 ) (t0 ) [N (t0 ) E (t0 ) |
tg |
VE (t0 ) ( cos |
VE |
|
)(t0 ) H ]t ... , |
|
R |
R cos2 |
|
||||
|
|
|
(t, t |
|
) (t |
|
) [ |
|
|
|
|
|
|
|
|
|
1 |
V |
|
(t |
|
) ]t ..., |
|
|
|||||||||||
0 |
0 |
N |
0 |
|
0 |
|
|
|
N |
0 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
H |
|
|
R |
|
|
|
|
E |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(t, t |
|
) (t |
|
) [ |
|
|
|
|
|
|
|
|
|
1 |
|
V |
|
(t |
|
) sin (t |
|
) |
]t ... , |
(2.1) |
||||||||
0 |
0 |
E |
0 |
H |
0 |
|
|
|
E |
0 |
0 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
N |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( ) cos , H ( ) sin ; |
|||||
E , N |
|||||
По навигационным параметрам |
|
||||
Можно |
показать, |
что при |
разложении в степенной ряд погрешностей |
||
SE R cos , |
SN |
R |
БИИМ для автономного режима ее работы в |
||
выработке плановых координат на конечном интервале времени t t t0 в соответствии с
моделью погрешностей БИИМ, ограничиваясь при этом полиномом третьего порядка, будем иметь
S |
|
(t, t |
|
) S |
|
(t |
|
) V |
|
(t |
|
|
) t [n |
|
(t |
|
) n |
|
(t |
|
) a |
|
] |
1 |
t 2 |
|||||
E |
0 |
E |
0 |
E |
0 |
N |
0 |
h |
0 |
E |
2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
nh sin (t0 ) N |
|
1 |
|
|
|
t |
|
|
|
|
|
t 1 |
|
|
|
|
||||||||||||||
|
|
3 |
|
( )d 1d nh |
|
|
||||||||||||||||||||||||
|
|
t |
|
aE |
N |
( )d 2d 1d, |
||||||||||||||||||||||||
6 |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t0 t0 |
|
|
|
|
|
|
t0 t0 t0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
25
S |
|
(t, t |
|
) S |
|
|
(t |
|
) V |
|
|
(t |
|
|
) t [n |
|
(t |
|
|
) n |
|
(t |
|
) a |
|
] |
1 |
|
t 2 |
||||||||||||||||||
N |
0 |
N |
0 |
N |
0 |
E |
0 |
h |
0 |
N |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
t 1 |
|
|
|
|
|
|
(2.2) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
nh * cos (t0 ) E |
|
|
|
t |
|
|
aN |
( )d 1d nh E |
( )d 2d 1d, |
||||||||||||||||||||||||||||||||||||||
6 |
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t0 t0 |
|
|
|
|
|
|
|
|
|
|
|
|
t0 t0 t0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
h(t, t |
|
) h(t |
|
|
) V |
|
(t |
|
|
) t [n |
|
(t |
|
) n |
|
|
(t |
|
) a |
|
g] |
1 |
|
t2 …; |
|||||||||||||||||||||||
0 |
0 |
H |
0 |
E |
0 |
N |
0 |
H |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
(t0 ), (t0 ), (t0 ) ; |
VE, N (t0 ), SE, N (t0 ) |
- |
|
погрешности |
|
начальных условий по |
||||||||||||||||||||||||||||||||||||||||
параметрам ориентации и навигационным параметрам, обусловленные погрешностями
обсервационного режима работы ИСОН; a, и a , - соответственно систематические и флуктуационные составляющие погрешностей акселерометров и гироскопов ИБ БИИМ.
3. Особенности построения ИСОН для объектов управления, двигающихся на начальном участке по баллистической траектории вне атмосферы[10]
Примеры построения интегрированных систем для малоразмерных динамичных объектов типа управляемых снарядов и блоков к настоящему времени известны. Например, в работе [11] приведено описание ИСОН с БИИМ на микромеханических гироскопах и миниатюрной ПА GPS. При этом преследуется цель обеспечения не только соответствующего уровня информационной автономности системы, но и решение задачи повышения помехоустойчивости ПА GPS.
Рассмотрим особенности построения ИСОН для объектов управления (ОУ), обладающих быстрым вращением вокруг продольной оси и возможным коническим движением, полет которых в начальный период времени осуществляется по баллистической траектории вне пределов атмосферы.
При этом следует учитывать тот факт, что при решении задачи ориентации объекта на участке баллистической траектории использование данных стандартной ПА СНС для интеграции с БИИМ неэффективно. Обусловлено это тем, что на баллистической траектории вне пределов атмосферы практически отсутствует связь между моделями погрешностей БИИМ в решении задач ориентации и навигации. Так как в этих условиях значение вектора кажущегося ускорения, измеряемого акселерометрами БИИМ в центре масс (ц.м.) объекта, практически равно нулю (если не учитывать торможение в остатках атмосферы). И, следовательно, отсутствует наблюдаемость и возможность оценки и коррекции нарастающих во времени погрешностей БИИМ в решении задачи ориентации при использовании данных стандартной ПА СНС.
Известное решение данной задачи требует применения либо прецизионного БИИМ, либо использования в составе ИСОН астровизирующих устройств или мультиантенной ПА СНС, использующей фазовые измерения на несущей частоте.
Применение БИИМ на лазерных или волоконно-оптических гироскопах ведет к значительной стоимости, существенным массогабаритным характеристикам и энергопотреблению.
Использование астровизирующих устройств или мультиантенной ПА СНС в динамических условиях движения ОУ рассматриваемого класса в ближайшее время не представляется возможным.
Особенности построения ИСОН для объектов рассматриваемого класса обусловлены также достаточно жесткими условиями движения (маневрированием) ОУ вблизи поверхности Земли, что будет приводить к частым срывам слежения за навигационными спутниками ( НСi ) и «сбоям» в первичных измерениях ПА СНС.
Вработе [10] рассматривается возможность обеспечения стационарного характера
иограниченного уровня погрешностей ИСОН, содержащей БИИМ на ММГ и
миниатюрную ПА СНС, в выработке параметров ориентации ОУ на участке
26
баллистической траектории его движения в течение длительного времени. Поставленная цель в решении данной проблемы достигается тем, что создаются условия, при которых появляется и используется существенная связь на участке баллистической траектории между моделями погрешностей БИИМ в решении задач ориентации и навигации.
Существо предлагаемого решения сводится к следующему. |
|
|
|
|
|
|
|
Если измерительный блок (ИБ) БИИМ разместить на ОУ в точке m с некоторым |
|||||||
отстоянием xo , yo , zo T в осях связанного с ОУ трехгранника |
xo yo zo |
от его ц.м., |
|||||
|
|
|
|
|
|
|
|
то вектор nm кажущегося ускорения в точке m при допущении, что объект является |
|||||||
|
|
, |
|
, |
|
]T (из-за |
|
абсолютно жестким и обладает вектором угловой скорости [ |
xo |
yo |
zo |
||||
o |
|
|
|
|
|||
вращения вокруг продольной оси и возможного конического вращения относительно ц.м.)
может быть представлен виде [1]: |
|
|||||||||
|
|
|
|
|
|
|
|
|
(3.1) |
|
|
nm no |
o o |
( o ) , |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где no |
- значение вектора кажущегося ускорения в ц.м. ОУ (на безатмосферном участке |
|||||||||
баллистической траектории его значение равно нулю). |
|
|||||||||
|
|
|
|
[n |
|
,n |
|
,n |
]T - есть значение вектора кажущегося ускорения точки m |
|
|
Пусть n |
|
xo |
yo |
||||||
|
|
mo |
|
|
zo |
|
|
|||
установки акселерометров ИБ БИИМ в осях объекта, тогда его проекции на оси географического сопровождающего трехгранника ENH будут равны:
|
|
|
|
, |
(3.2) |
n |
h |
C o n |
mo |
||
|
h |
|
|
||
где Co |
|
- матрица ориентации, характеризующая положение связанных |
с ОУ осей |
||
h
относительно осей географического сопровождающего трехгранника.
Из выражения (3.1) следует, что при соответствующем отстоянии ИБ БИИМ от ц.м. ОУ, т.е. при 0 в условиях быстрого вращения объекта и (или) конического движения
nh 0 .
Покажем, что данное условие h приводит к наличию связи на баллистической n 0
траектории между моделями погрешностей БИИМ в решении задач ориентации и навигации, что является необходимым условием для положительного решения рассматриваемой проблемы.
В соответствии с алгоритмом задачи преобразования сигналов акселерометров на
навигационные оси |
ENH |
согласно выражению (3.2) |
погрешности формирования по |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
данным акселерометров вектора кажущегося ускорения |
nh _ pr |
в осях географического |
|||||||||||||||||
сопровождающего трехгранника будут равны |
|
|
|
|
|
|
|
|
|||||||||||
|
|
Cho |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nh |
nmo |
Cho ao , |
|
|
|
|
|
|
|
|
|
|
|
(3.3) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где ao - вектор инструментальных погрешностей акселерометров в осях объекта. |
|||||||||||||||||||
Учитывая, |
что |
C o C h |
C o , |
|
где |
Co |
|
- |
кососимметрическая |
матрица, |
|||||||||
|
|
|
|
|
|
h |
o |
h |
|
|
|
h |
|
|
|
|
|
|
|
соответствующая вектору ho |
погрешностей задачи ориентации [1], получим |
|
|||||||||||||||||
|
|
|
|
|
Co |
|
|
|
|
|
|
|
|
|
|
|
|
, |
(3.4) |
n |
h |
Co n |
h |
a |
o |
или n |
h |
|
ho |
n |
h |
Co a |
o |
||||||
|
|
h |
h |
|
|
|
|
|
|
h |
|
|
|||||||
где ho - вектор погрешностей задачи ориентации.
Записав алгоритм выработки БИИМ составляющих вектора линейной скорости точки m объекта (соответствующий алгоритму идеальной работы) в осях географического трехгранника
|
|
t |
|
|
ˆ |
ˆ |
|
Vh (t) Vh (t0 ) |
nh _ pr ( ) ge _ h Wcor _ h ( ) d , |
||||||
|
|
t0 |
|
|
|
|
|
27
ˆ ˆ
(где ge _ h ,Wcor _ h - расчетные значения ускорения нормальной силы тяжести и кориолисова
ускорения)
в приращениях (полагая погрешности малыми и ограничиваясь линейными членами в разложении), получим с учетом соотношения (3.4) для погрешностей БИИМ
|
|
|
|
o |
|
|
|
|
|
|
|
|
ˆ |
, |
(3.5) |
||||
Vh |
ho nh |
Ch |
ao |
Wcor _ h ge _ h |
|||||
ˆ |
|
|
|
|
|
|
|
|
|
где Wcor _ h , |
ge _ h |
- |
погрешности |
формирования соответственно оценок |
кориолисова |
||||
ускорения и ускорения силы тяжести, включая и аномалии гравитационного поля Земли.
Из уравнения (3.5) следует, что погрешности Vh БИИМ в выработке вектора линейной скорости ОУ в точке m размещения блока акселерометров в проекциях на
навигационные оси в условиях баллистической траектории при nh 0 будут зависеть
также и от вектора ho погрешностей БИИМ в выработке параметров ориентации
объекта.
Следовательно, если БИИМ (при соответствующем выборе динамических характеристик инерциальных элементов и частоты решения задач ориентации и навигации), будет обеспечивать измерение динамических составляющих в векторе линейной скорости, обусловленных быстрым вращением ОУ вокруг продольной оси и его коническим движением при соответствующем отстоянии его ИБ от ц.м. объекта, то из разностных измерений с опорой на данные ПА СНС (где также должна содержаться
информация о вращении объекта) путем наблюдения за погрешностью Vh БИИМ на
конечном интервале времени можно найти оценки искомых погрешностей ho БИИМ в выработке параметров ориентации объекта, движущегося по баллистической траектории.
4. Результаты моделирования работы ИСОН в пакете Matlab(Simulink)
Моделирование осуществлялось при следующих исходных данных:
характеристики Земли и гравитационного поля
R 6378163 - средний экваториальный радиус Земли, (м);
Ue 7.2921151467 10-5 , (рад/с); tgr 0 =0;
g |
3.98603 1014 - гравитационная постоянная Земли, ( м3 / c2 ); |
2.634 10 25 ( м5 / c2 ) |
||||
и 6.773 1036 ( м7 / c2 ) - коэффициенты разложения гравитационного потенциала; |
||||||
|
|
|
начальные значения параметров орбиты НСi (1…6) |
|
||
t |
0 |
0 ; |
a (6378.163 19100) 103 (м); |
e 0 ; |
|
|
|
|
|
0 |
0 |
|
|
|
|
|
- i10 =60*pi/180; 10 =0*pi/180; 10 =0; u10 =30*pi/180; |
|
||
|
|
|
- i20 =60*pi/180; 20 =0*pi/180; 2 0 =0; u20 =75*pi/180; |
|
||
|
|
|
- i30 =60*pi/180; 30 =120*pi/180; 30 =0; u30 =30*pi/180; |
|
||
|
|
|
- i40 =60*pi/180; 40 =120*pi/180; 40 =0; u40 =75*pi/180; |
|
||
|
|
|
- i50 =60*pi/180; 50 =240*pi/180; 50 =0; u50 =30*pi/180; |
|
||
|
|
|
- i60 =60*pi/180; 60 =240*pi/180; 60 =0; u60 =75*pi/180; |
|
||
для каждого НСi : |
|
|
||||
u0 0 |
0 ; |
|
|
|||
p |
|
a |
(1 e2 ) ; |
|
|
|
|
0 |
0 |
0 |
|
|
|

28
r0 |
|
|
|
|
p0 |
|
- модуль радиус-вектора при t t0 ; |
|||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
1 |
e0 cos 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
V |
|
|
|
g |
|
1 e cos |
|
, |
V |
|
|
|
|
g |
|
e |
sin |
|
; |
|||
|
|
|
|
0 |
r0 |
|
0 |
|||||||||||||||
0 |
|
|
|
p0 |
0 |
|
|
|
|
0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p0 |
|
|
|
|||||
rin1 m (t0 ) r0 (cos 0 cos u0 |
sin 0 cos i0 sin u0 ) ; |
|||||||||||||||||||||
rin2 m (t0 ) r0 (sin 0 cos u0 |
cos 0 cos i0 sin u0 ) ; |
|||||||||||||||||||||
rin3 m (t0 ) r0 sin i0 sin u0 ; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Vin1 m (t0 ) Vr0 |
rin1 _ m (t0 ) / r0 |
V 0 (cos 0 sin u0 |
sin 0 cos i0 cos u0 ) ; |
|||||||||||||||||||
Vin2 m (t0 ) Vr0 |
rin2 _ m (t0 ) / r0 |
V 0 (sin 0 sin u0 cos 0 cos i0 cos u0 ) ; |
||||||||||||||||||||
Vin3 m (t0 ) Vr0 |
rin3 _ m (t0 ) / r0 |
V 0 sin i0 cos u0 ; |
|
|||||||||||||||||||
Погрешности ВОГ (ММГ) в проекциях на оси xb yb zb ИБ: |
||||||||||||||||||||||
|
Mgx, Mgy, Mgz - нестабильность масштабных коэффициентов ВОГ - случайные |
|||||||||||||||||||||
|
величины с уровнем (1 ); |
|
|
|
|
|
|
|
|
|
||||||||||||
|
xb , yb , zb - |
систематические |
составляющие дрейфов ВОГ в проекциях на оси |
|||||||||||||||||||
xb yb zb ИБ, которые характеризуют смещение нулей от пуска к пуску - случайные величины
суровнем (1 );
xb , yb , zb - случайные составляющие дрейфов ВОГ, которые характеризуют дрейф
нуля в пуске - марковские процессы первого порядка 1gi , gi ( i xb , yb , zb );
флюктуационные составляющие дрейфов ВОГ в проекциях на оси ИБ – дискретные белые шумы на рабочей частоте 2gi ;
|
xy , xz , yx , yz , zx , zy - |
погрешности |
ортогонализации |
осей чувствительности |
||
|
гироскопов - случайные величины с уровнем (1 ) 10 угл.с.; |
|
||||
Погрешности линейных акселерометров в проекциях на оси xb yb zb ИБ: |
||||||
|
Max, May, Maz |
- нестабильность масштабных коэффициентов линейных |
||||
|
акселерометров - случайные величины с уровнем (1 ); |
|
||||
|
a xb, a yb, azb |
- смещение |
нулей линейных |
акселерометров |
- случайные величины с |
|
|
уровнем (1 ); |
|
|
|
|
|
|
a xb, a yb, azb |
- дрейфы нулей линейных акселерометров - марковские процессы первого |
||||
порядка 1ai , ai ;
флюктуационные составляющие погрешностей акселерометров в проекциях на оси xb yb zb
ИБ - дискретные белые шумы на рабочей частоте 2ai .
ПА СНС
погрешности (систематические составляющие) измерений ПА GPSD =100; (м); D =10; (м/с)
шумы измерений (1 )
i =10; (м); |
i =0.1; (м/с) |
ТТХ ИБ БИИМ
29
отстояние ИБ БИИМ от центра масс ОУ
x0 0.1м; y0 0.2 м; z0 0
Модель погрешностей акселерометров (MMA) |
|
|
|
|
|
|
||||||
Max =-1*1e-2; |
May =1*1e-2; |
Maz=1*1e-2; |
|
|
|
|
|
|
||||
axb =-0.1 (м/с2); |
a yb =0.1 (м/с2); azb =0.1 (м/с2); |
|
|
|
|
|
|
|||||
1 =0.03 (м/с2); |
|
ai |
=0.01 (с-1); |
2 |
ai |
=0.4 (м/с2); ( i x |
b |
, y |
b |
, z |
b |
) |
ai |
|
|
|
|
|
|
|
|||||
Модель погрешностей гироскопов (ММГ)
Mgx =0.6*1e-2; Mgy =-0.6*1e-2; Mgz =0.6*1e-2;
xb =300*5e-6 (рад/с); yb =250*5e-6 (рад/с); zb =-300*5e-6 (рад/с);1gi =30*5e-6 (рад/с); gi =1/600 (с-1); 2gi =300*5e-6 (рад/с); ( i xb , yb , zb )
погрешности начальной выставки БИИМ (t=0)
|
0 |
=-10*pi/180; |
|
0 |
=10*pi/180; |
|
0 |
=-10*pi/180; |
||
|
|
|
|
|
|
|
|
|||
VE 0 =0.1 (м/с); |
VN 0 =-0.1 (м/с); |
VH 0 =0.1 (м/с); |
||||||||
0 =40м/R; |
0 =-45м/(R*cos(fio*pi/180)); |
h0 =40м; |
||||||||
Рабочие частоты при моделировании
dt=0.001 с; - дискретность имитационного моделирования движения ОУ по траектории
(1000 гц);
dT=0.005 с; - дискретность работы алгоритмов БИИМ (200 гц); dT1=dT; - дискретность работы ковариационного канала ФК
Tz=0.2 с; - дискретность обработки измерений в ФК (дискретность данных GPS – 5 гц)
4.1. Движение ОУ на безатмосферном участке баллистической траектории
Начальные условия по параметрам движения (рад; м; м/с):
0 =600*pi/180; 0 =300*pi/180; ho=0.3*106 (м);
Vo=6000 (м/с); Wto=0; |
|
|
|
|
|
|
|
|
|
|
|
||||||||
K (t) Aor0 Kr sin(k t K ) ; |
Aor0 |
40*pi/180; Kr ; |
|
K 90*pi/180; |
|||||||||||||||
60*pi/180; |
|
k |
0.5...1.0 (рад/с); |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t) |
cm 0 |
|
r |
sin( t |
|
) ; |
|
cm 0 |
400*pi/180; |
|
r |
; |
|
00 |
; |
||||
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
||||||
0 =0 |
0 |
*pi/180; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
8...10 (рад/с); |
|
|
|
|
|
|
|
|
|
|||||||||
30
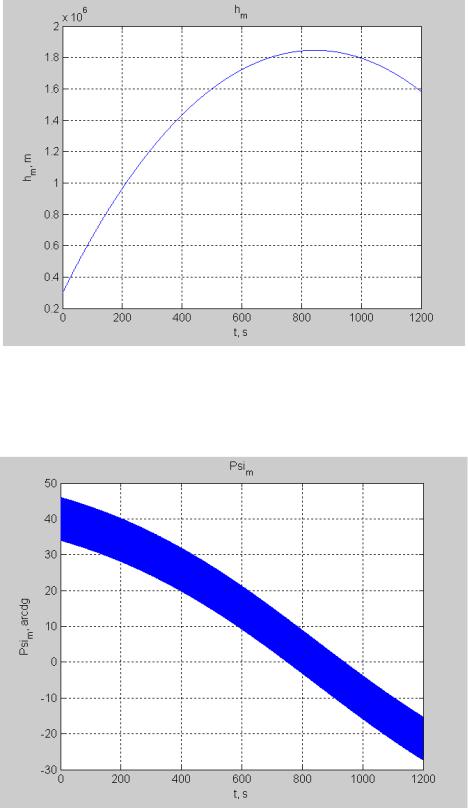
Результаты моделирования
Рис.4.1а. Изменение высоты (м) баллистической траектории (при изменении азимута от 400 до 1200)
Рис.4.1б. Изменение угла тангажа (град.) баллистической траектории (с учетом конического движения)