

2.6.4 Основные сведения о выборе, установки и защите от агрессивных сред, приборов для измерения давления.
Измеряемое давление не должно превышать 3/4 шкалы прибора (для обеспечения долговечности прибора, точности измерений);
Перед прибором давления необходима установка трехходового крана: кран обеспечивает следующие функции:
- плавное включение прибора в работу
- поверка рабочего прибора с помощью образцового
- продувка импульсной линии сжатым воздухом.
3 Если измеряемая среда – жидкость, то место отбора измеряемого давления выбирается ниже продольной оси трубопровода, если газ или пар, то выше продольной линии. Импульсная линия соединяет прибор давления с местом отбора, должна выполняться с уклоном не менее 1:50. Уклон в сторону прибора – измеряемая среда жидкость. Уклон в сторону отбора – газ или пар.
4 Для защиты приборов давлений от высоких температур применяются U-образные или кольцевые сильфонные трубки.
5 Для защиты приборов давления от агрессивных сред применяются разделительные сосуды и предохранительные мембраны.


Рисунок 21
Измерение уровня.
Уровнем называется высота столба жидкости в технологическом аппарате.
Поплавковые измерители уровня.

Рисунок 22
В общем случае выталкивающая сила:
![]()
Переходя к частным случаям, когда
![]() =0
и сечение поплавка постоянно по высоте,
то получим:
=0
и сечение поплавка постоянно по высоте,
то получим:
![]()
В зависимости от способов создания уравновешивающей силы, различают следующие виды поплавковых систем:
1) F=G
![]()
![]() -
глубина погружения.
-
глубина погружения.
F=G,x=const– поплавок постоянного погружения.
F=L,
![]() ,
,
![]() ,
,
![]()
![]() -
поплавок переменного погружения,
буйковый. 13УБ08- уровнемер буйковый.
-
поплавок переменного погружения,
буйковый. 13УБ08- уровнемер буйковый.
Гидростатические уровнемеры.
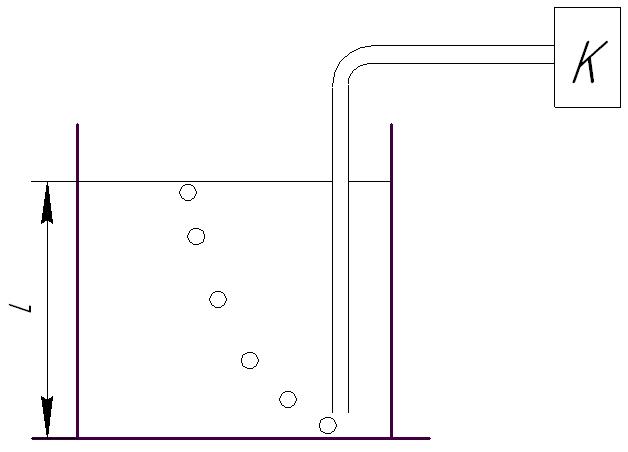
Рисунок 23
Принцип действия основан на уравновешивании давления, подаваемого в барботажную трубку давлением в аппарате. Принято считать, что уравновешивание произошло, если частота барботажа не превышает 1 пузырька в секунду.
2.7.3 Электрические уровнемеры.
Подразделяются на две основные группы:
- емкостные;
- омические.

Рисунок 24
Рассмотрим емкостной измеритель уровня:
электрическая емкость чувствительного
элемента определяется по формуле:
![]() ,
,
Где S- площадь,![]() -
диэлектрическая проницаемость среды,
-
диэлектрическая проницаемость среды,![]() -
диэлектрическая проницаемость вакуума,
-
диэлектрическая проницаемость вакуума,![]() -
расстояние между пластинами.
-
расстояние между пластинами.
- Система позволяет во всем диапазоне изменения уровня контролировать его величину;
- Система позволяет осуществлять либо сигнализацию, либо регулирование по величине верхнего уровня.
3 Основы теории автоматического управления
3.1 Общая структурная схема систем автоматического управления.
Автоматическое управление - совокупность автоматических воздействий, выбранных из множества возможных на основании определенной информации.

Рисунок 25
Объект управления - это динамическая система, изменяющая свои параметры под влиянием внутренних и внешних возмущающих воздействий. Система управления - это совокупность автоматических устройств связанных общей задачей управления. Внешнее возмущающее воздействие поступает на объект управления из вне и с помощью системы управления могут ликвидироваться, регулироваться и стабилизироваться. Внутреннее возмущающее воздействие возникает внутри объекта управления и не зависит от системы управления.
f1, f2…fn- внешнее возмущающее воздействие;q1,q2…qn- внутреннее возмущающее воздействие;x….- входные величины объекта управления;y….- выходные величины объекта управления;z….- заданное значение выходных величин; ε….- управляющее или регулирующее воздействие.
I- система автоматического контроля (САК),II- система автоматического регулирования (САР).