

5.1 Классификация объектов управления.
5.1.1. Одномерные объекты
Эти объекты имеют одну выходную величину и характеризуются одним уравнением статики и одним уравнением динамики.
Fпр,Fр– входные величины
L– выходная величина
L=f(Fпр,Fр) – Ур-е статики
L=f(Fпр,Fр,t) – Ур-е динамики
Для одномерного объекта схема динамического канала имеет вид:
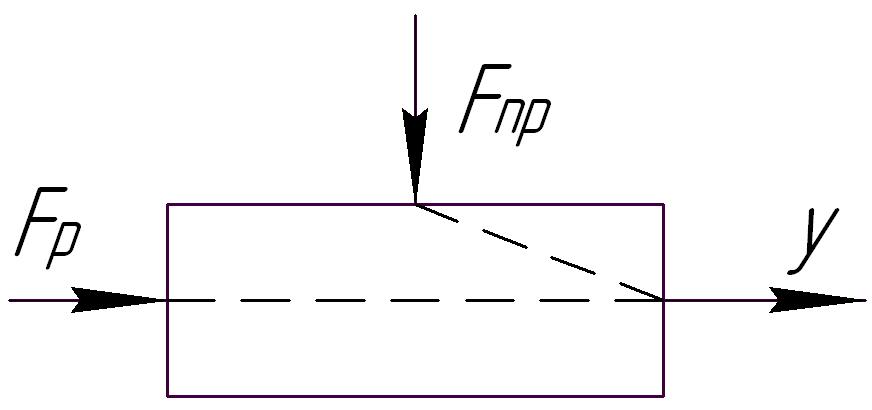
Рисунок 71
По данной схеме видно, что выходная величина определяется параметрами 2-х входных величин.
5.1.2 Многомерные объекты
Данные объекты содержат 2,3 и более выходных величин. Число уравнений должно соответствовать числу входных величин.
Объект с независимыми выходными величинами.
Изменение одной из входных величин приводит к изменению только своей выходной величины.
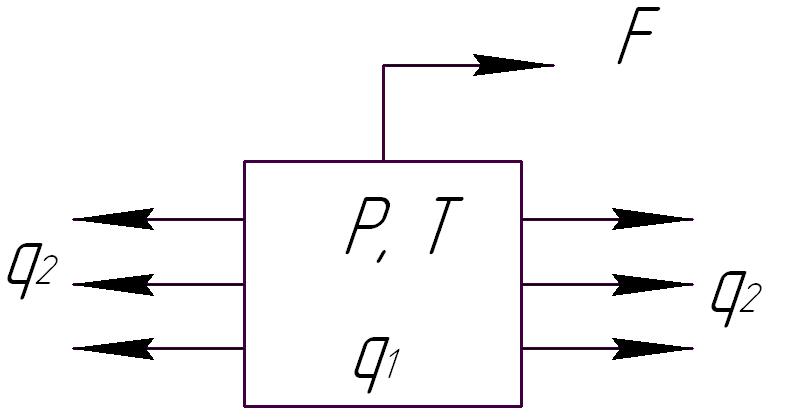
Рисунок 72
Данная схема соответствует процессу испарения однокомпонентной жидкости с непрерывным отбором
паровой фазы
F=f(q1,q2)T=f(P) – уравн. статистики
F=f(q1,q2,t)T=f(P,t) – уравн. Динамики
Схема динамического канала имеет вид:
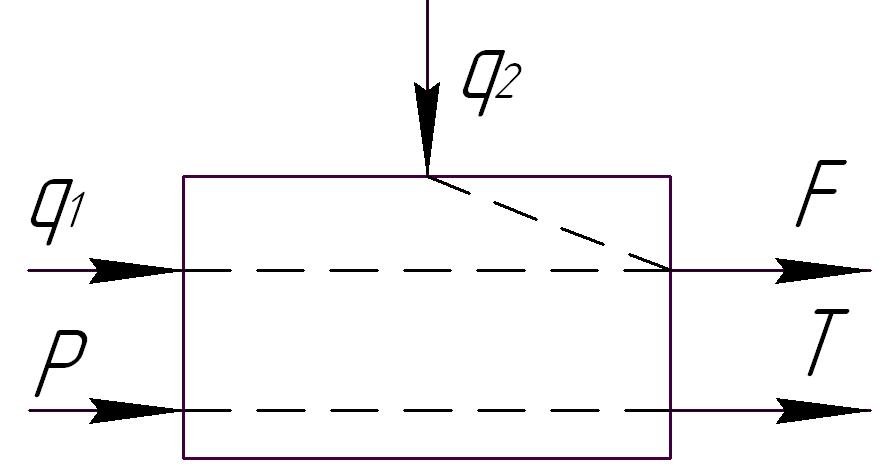
Рисунок 73
Объект со взаимосвязанными выходными величинами.
В данном объекте изменение входных величин приводит к одновременному изменению нескольких выходных величин.
Рассмотрим непрерывный экзотермический реактор идеального перемешивания.
В данном объекте имеются
5 входных величин: F,Qн,Tн,Tx,Fx
3 выходных величины: Q,T,F
Q=f(F,Fx,Qн,Tн,Tx,t)
T=f(F,Fx,Qн,Tн,Tx,t) уравнения динамики
Схема динамического канала имеет вид:

Рисунок 74
5.1.3 Объект с сосредоточенными параметрами.
У этих объектов регулируемые величины в данный момент времени имеют одно числовое значение. Динамика таких объектов описывается обыкновенными дифференциальными уравнениями с постоянными коэффициентами.
5.1.4 Объекты с распределенными параметрами.
У данных объектов одноименные параметры имеют разные числовые значения в разных точках аппарата в данный момент времени. Динамика таких объектов описывается дифференциальными уравнениями в частных производных. Для их решения используются методы разбивки на участки, где параметры являются сосредоточенными.
5.2 Свойства объектов управления.
Самовыравнивание– это свойство устойчивого объекта устанавливаться в равновесное состояние после изменения входной величины.
Скорость изменения выходной величины постепенно уменьшается до нуля, что связанно с наличием внутренней отрицательной обратной связи.
Самовыравнивание определяется степенью
самовыравнивания
![]() =
х /y∞
=
х /y∞
y∞ - равновесное состояние выходной величины.
Чем больше степень самовыравнивания, тем меньше отклонение выходной величины от первоначального положения.
Емкость объекта– способность аккумулировать рабочую среду, запасать её внутри объекта.
Емкость характеризует инерционность объекта, т.е. степень влияния входной величины на скорость изменения выходной.
Под емкостью понимается, такое изменение входной величины, которая приводит к изменению его выходной величины на единицу за единицу отрезка времени
![]() Δх =Fпр-Fрасх
Δх =Fпр-Fрасх
Чем больше емкость, тем меньше скорость изменения выходной величины и наоборот.
Запаздывание объекта.Заключается в том, что выходная величина начинает изменятся через
некоторый промежуток τ , который называется временем запаздывания.
τ = L/SL– расстояние для передачи сигнала;S- скорость прохождения сигнала.