

I. Структура привода и исходные данные
Задание на курсовой проект можно рассматривать как часть реального технического задания. Оно содержит структурную схему привода (включая схему передаточного механизма) и исходные данные (рисунок 2).

1 – электродвигатель; 2 – передаточный механизм (редуктор, коробка скоростей, вариатор); 3 – исполнительный орган (барабан, тяговая(ые) звездочка(и), питатель); 4 – муфта, ременная или цепная передача; 5 – муфта, цепная передача или открытая зубчатая передача
Рисунок 2 – Структурная схема привода
Исходные данные:
![]() -
окружная сила на барабане или звездочке,
кН;
-
окружная сила на барабане или звездочке,
кН;
V - скорость тягового органа, м/с;
D - диаметр приводного барабана, м (для ленточного конвейера);
Р - шаг тяговой цепи, мм;
z - число зубьев приводной звездочки цепного конвейера.
II. Элементы и кинематические схемы редукторов и мотор-редукторов
Условные обозначения элементов приведены в таблице 1.
Пример кинематической схемы приведен на рисунке 3.
Варианты схем редукторов приведены на рисунке 4.
Таблица 1 – Условные обозначения элементов кинематических схем
по ГОСТ 2.770
|
Наименование элемента |
Условное обозначение |
Наименование элемента |
Условное обозначение |
|
Вал, ось |
|
Муфта. Общее обозначение без уточнения типа |
|
|
Цилиндрические колеса |
Муфта нерасцепляемая | ||
|
с левым зубом |
|
глухая |
|
|
с правым зубом |
|
упругая |
|
|
шевронные |
|
компенсирующая |
|
|
Подшипники качения и скольжения (без уточнения типа) | |||
|
радиальные |
|
упорные |
|
|
Подшипники скольжения |
Подшипники качения | ||
|
радиальные |
|
радиальные |
|
|
радиально-упорные односторонние |
|
радиально-упорные односторонние |
|
|
радиально-упорные двухсторонние |
|
радиально-упорные двухсторонние |
|
|
упорные односторонние |
|
упорные односторонние |
|
|
упорные двухсторонние |
|
упорные двухсторонние |
|
|
Передачи гибкой связью | |||
|
Передача ремнем |
Передача цепью | ||
|
без уточнения типа ремня |
|
общее обозначение без уточнения типа цепи |
|
|
плоским ремнем |
|
круглозвенной |
|
|
клиновидным ремнем |
|
пластинчатой |
|
|
круглым ремнем |
|
зубчатой |
|
|
зубчатым ремнем |
| ||






























Рисунок 3 – Кинематические схемы приводов:
а - общая кинематическая схема привода; б - глухая или упругая муфты;
в - ременная передача; г - цепная передача; д - компенсирующая муфта;
е - цепная передача; ж - открытая зубчатая передача.
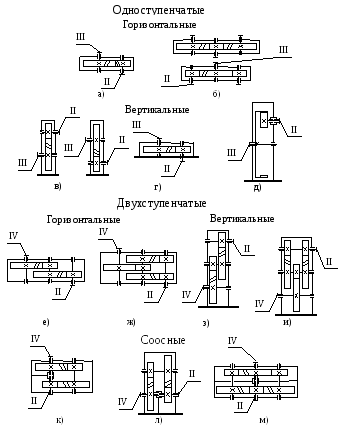
Рисунок 4 – Кинематические схемы редукторов (см. также с.9-10):
а, б – одно- и двухпоточные; в, г - с горизонтальными и вертикальными валами; д - с внутренним зацеплением; е, з - по развернутой схеме; ж, и - с раздвоенной быстроходной ступенью; к – горизонтальный; л – вертикальный;
м - двухпоточный
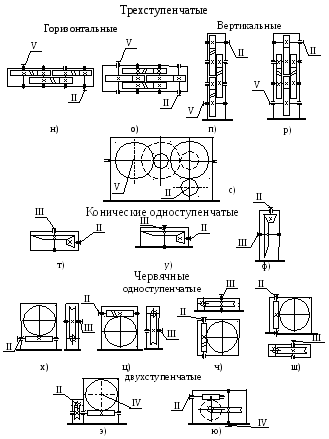
Рисунок 4 – Продолжение
н, п - несимметричные; о, р - симметричные; с - с вертикальной быстроходной ступенью; т, э - горизонтальные; у - с вертикальным валом; ф - с вертикальным валом шестерни; х - с верхним валом; ц - с нижним валом; ч - с вертикальным валом колеса; ш - с боковым червяком; ю - вертикальный
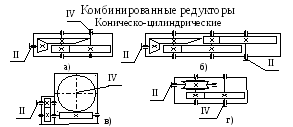
Рисунок 4 – Окончание
а - двухступенчатые; б - трехступенчатые; в - цилиндрическо-червячные; г - червячно-цилиндрические