

Ошибки расчета координат целей
|
l,км |
∆l, м |
∆Н, м |
|
20 50 100 200 500 |
0,065 1,02 8,14 65 1020 |
3,12 19,5 780 3120 19500 |
И
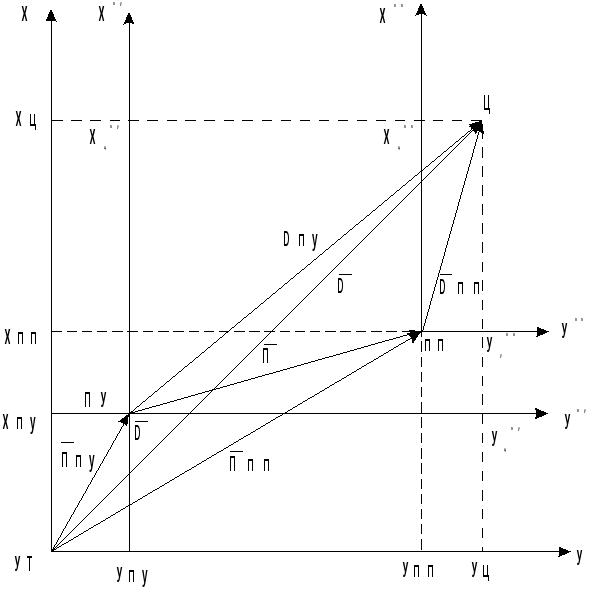 Рис.
2.12.
Взаимосвязь систем координат.
Рис.
2.12.
Взаимосвязь систем координат.
Перерасчёт координат целей производиться в два этапа (рис.2.12). Предположим, источником информации о воздушной обстановке является передающий пункт (ПП), а потребителем – пункт управления.
Измеряются
координаты цели в системе координат с
центром в точке
ПП. Как видно из
рис. 2.12, положение цели характеризуется
вектором дальностиDпп
![]() На пункте управления этой жецели
будет соответствовать другой вектор
Dпп(
На пункте управления этой жецели
будет соответствовать другой вектор
Dпп(![]() ),начинающийся
из точки ПУ.
),начинающийся
из точки ПУ.
Расстояние ПП от
ПУ характеризуется вектором горизонтального
параллакса
![]() .Для
перехода отDпп к Dпу можно
использовать векторное управление
.Для
перехода отDпп к Dпу можно
использовать векторное управление
![]()
однако предварительно необходимо найти вектор параллакса П. Это оказывается несложной задачей, если известны координаты точек ПП (Хпп, Yпп) и ПУ (Хпу, Yпу) в единой системе координат, связанной с некоторой условной точкой УТ. Ввиду того, что
![]()
модно записать
![]()
![]()
![]() Следовательно,
Следовательно,
![]()
Полученное векторное
уравнение можно решать как на пункте
управления,так и на
пункте передачи, если при решении
известны координаты всех трех точек
(УТ, ПУ и ПП). Поскольку пункты управления
и передачи информации в основном работают
в движении, непрерывная выдача
информации в канал связи их текущих
координат является нецелесообразной.
Двухэтапное решение задачи пересчета
данных о воздушной
обстановке в единую систему координат
состоит в том, что на первом этапе вектор
![]() пупреобразуется в вектор
пупреобразуется в вектор
![]() ,
а на втором векторе
,
а на втором векторе
![]() пересчитывается в искомый вектор
пересчитывается в искомый вектор
![]() пу.
В аналитической форме имеем:
пу.
В аналитической форме имеем:
![]() =
=
![]() пп+П
пп+П![]() пп;
пп;
![]() пу=
пу=
![]() -
-![]() пу.
пу.
Таким образом, на передающем пункте три координаты цели преобразуются по формулам:
Хц =ХцПП+Хпп;Уц =![]() +Упп;Нц
=НцПП+Нпп,
+Упп;Нц
=НцПП+Нпп,
а на приемном - Хцпу=Хц–Хпу,Уцпу =Уц–Упу,Нцпу=Нц–Нпу.
Прямоугольные координаты условной точки доводятся до всех пунктов управления боевым распоряжением. Текущие координаты ПП ПУ определяются с помощью аппаратуры топопривязки, устанавливаемой на объектах АСУ. Разность этих координат и есть Хпп,Упп,НппиХпу,Упу,Нпу.
При обмене данными о воздушной обстановке в пределах армии или фронта для учета кривизны Земли на командные пункты и пункты управления передается номер координатной зоны условной точки в картографической системе Гаусса - Крюгера. Номера зон ПП и ПУ также учитываются в измененном алгоритме пересчета координат цели. Общий порядок решения задачи преобразования координат цели при обмене информацией между ПУ подчиненного звена СКП следующий:
по известным прямоугольным координатам условных точек ПУ и СКП и номерам зон карт определяется географические координаты условных точек - широта долгота и вертикаль к поверхности земного эллипсоида;
по географическим координатам рассчитываются коэффициенты пересчета координат цели К11…К14,К21…К24, которые учитывают взаимный разворот осей смещение центров систем координат, связанных с двумя условными точками;
коэффициенты пересчёта используются в формулах преобразования координат цели в единую систему координат пункта сбора данных о воздушной обстановке.
![]()
 Рис.
2.13. К решению задачи приведения информации
о воздушной обстановке к единому
времени.
Рис.
2.13. К решению задачи приведения информации
о воздушной обстановке к единому
времени.
УцПУ = К12Хц + К11 (УцПП)’ + К13(НцПП)' + К14 + σ.
Здесь (УцПП)' и (НцПП)' отличаются от измеренных передающих пунктов координатУцППиНцППпоправочными коэффициентами; σ- дополнительный поправочный коэффициент.
При сборе и обобщении информации о воздушной обстановке в связи с асинхронной работой радиолокационных станций возникает задача приведения данных о целях к единому времени. Действительно механическое смешивание данных, получаемых в различные моменты времени, не повышает, а понижает точность усредненных координат. При решении данной задачи всегда какой-то один источник информации считается основным, а остальные - вспомогательными. Время поступления очередного сообщения о цели от основного источника является исходной точкой отсчета, по отношению к которой измеряется опережение или запаздывание поступления данных остальных источников.
Предположим, на автоматизированный командный пункт поступают данные об одной и той же цели от основного (И1) и вспомогательного (И2) источников информации (рис.2.13). Каждый источник выдает текущие координаты цели. Данные задерживаются в канале связи, однако среднее время задержки tксдля обоих источников одинаково и пренебрежимо мало (обычноtкссоставляет. 0,1... 0.01 с). Моменты поступления сообщений из канала связиtп1иtп2фиксируются путем считывания и запоминания показания электронного датчика времени КП. Из рис.2.13 видно, что имеет место запаздывание данных источника И2 по отношению к источнику И1 на величину
t зап=t п2– t п1.
Приведение данных о цели к единому времени состоит в компенсации этого запаздывания. Приведенные по времени относительно tп1координаты цели второго источника рассчитываются по формулам:
ХпрИ2=YИ2+VYИ2t ЗАП
YпрИ2=Yи2+VYИ2t зап;(2.16)
НпрИ2= НИ2+VнИ2t зап;
где ХИ2,Y И2,НИ2- текущие координаты цели, переданные вспомогательным источником;VxИ2,VуИ2,VнИ2- составляющие скорости цели, рассчитанные источником И2.
Необходимость решения задачи отождествления отметок цели вызвана тем, что источники информации могут выдавать данные как для одних и тех же, так и о разных целях. Разделение отметок позволяет усреднять координаты целей, которые сопровождаются одновременно несколькими источниками. Выявление новых целей, только входящих в объединенную зону обнаружения группировки средств ПВО позволяет своевременно поставить задачи подчиненным по ведению разведки воздушного противника.
При решении задачи отождествления выгодных целей применяются методы стробирования параметров траектории, аналогичные рассмотренным в п.2.3. Данные одного, наиболее надежного и точного, источника информации принимаются за основу. По отношению к каждой выдаваемой этим источником цели производится проверка условий попадания целей других источников в стробы отожествления:
|![]() |
<Хстр,|
|
<Хстр,|![]() |< Yстр;
|< Yстр;
|![]() |< Нстр;
|< Нстр;
где Хi (0),Yi(0),Нi (0)- текущие координаты отожествляемой цели по данным основного источника информации;Хi (j), Yi (j), Нi (j) - текущие координаты отождествляемой цели по даннымj-го вспомогательного источника;Хстр,Yстр,Нстр- размеры строба отождествления по координатамХ,У,Н.
Предварительно все координаты должны быть пересчитаны в единую систему координат и к единому времени.
Более надежное отождествление имеет место, если кроме координат сравниваются и составляющие скорости и характеристики цели при сравнении составляющих скорости используются неравенства
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
где Vхi(0),Vуi(0)Vнi(0) - составляющие скоростицелапо координатамX,Y,Нпо данным i-го основного источника;
Vxi(j),Vyi(j),Vнi(j)- составляющие скорости цели по координатам X, У, Н по даннымj-го вспомогательного источника;
Vxстр,Vyстр,Vнстр- размеры строба отождествления по составляющим скорости Vх,VyиVн.
При сравнении характеристик цели проверяется .совпадение признаков цели: свой (ПП), групповой (ПГ),маневрирующий (ПМ), постановщик помех (ППом) и т. д. Другими словами, проверяется справедливость равенств :
ППi(0)=ППi(j) ПГi(0)=ПГi(j)
ПМi(0)=Пмi(j) ППомi(0)=ППi(j)
Следует отметить, что размеры стробов в АСУ, как правило, изменяются от одного цикла решения задачи отождествления к другому. Размеры строба зависят от точности вспомогательного источника информации, наличия пропусков отметок цели. Характера движения цели и т.д. . в АСУ конкретные значения Хстр,Устр,Нстрсчитываются из ряда хранящихся в памяти чисел в зависимости от поступивших команд операторов нот результатов проверки выполнения нескольких условии (цель маневрирует или не маневрирует, съем координат автоматически или автоматизированный и пр.).
В каждой АСУ решение задачи отождествления целей имеет некоторые особенности, которые учитывают специфику источников и потребителей о воздушной обстановке.