

VOYNA_1 / 4-3
.DOC-
АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ О ПОСТАНОВЩИКАХ ПОМЕХ
В условиях сложной помеховой обстановки, в которой ведется противовоздушная оборона войск все большее значение приобретает реализация в АСУ методов пассивной радиолокации, с помощью которой можно обнаружить и измерять координаты воздушно-космических, наземных и подводных объектов. Источниками излучения могут быть как работающие радиопередатчики объектов, так и сами объекты имеющие тепловой или иной радиолокационный контраст с окружающей средой.
Характерной чертой пассивной радиолокации является то, что дальность до целей не может быть определена по данным только одного пункта приема. Получение всех координат постановщиков помех оказывается возможным лишь в результате обработки информации, поступающей от нескольких РЛС.
Основным методом определения координат источников радиоизлучения в АСУ является триангуляционный метод (рис.2.14). Направления на цель должны быть получены одновременно от двух источников, разнесенных на некоторое расстояние Б, называемое базой. Местоположение цели определяется точкой пересечения двух прямых, каждая из которых является геометрическим местом тачек возможного местонахождения цели. Опустив перпендикуляр из точки Ц на ось 0Y из прямоугольных треугольников И1ЦЦ и И2ЦЦ ,получаем:
Б = И1Ц’ – И2Ц’ – h ctg 1 – h ctg 2 = h(ctg1 – ctg2),
где h = d1 sin1. Подставляя второе выражение в формулу для Б, получим
Б = d1 sin1 (ctg1 – ctg2) (2.17)
Отсюда ![]() (2.18)
(2.18)
При определении пространственных координат цели достаточно измерить азимуты β1 и β2 в двух пунктах, а угол места в одном. Так, если дополнительно к β1 я β2 и известен угол места ε1, то наклонная дальность до постановщика помех может быть найдена по формуле:
Рис. 2.14. Сущность
триангуляционного метода определения
координат постановщика помех.![]()

Определение координат целей триангуляционным методом сопряжено с ошибками. Основными причинами, снижающими точность определения координат, являются следующие:
-
ошибки измерения пеленгов β1, β2, ε1, ε2;
-
ошибки определения базы Б;
-
неодновременность пеленгования целей различными РЛС;
-
наличие ложных пеленгов от боковых лепестков диаграммы направленности РЛС.
Наибольшее влияние на точность результатов оказывают ошибки измерения пеленгов, которые зависят от большого числа факторов и могут составлять несколько градусов. Главными путями уменьшения ошибок являются сужение диаграммы направленности РЛС и компенсация ошибок ориентирования антенных систем. Величина базы существенно влияет на точность определения дальности до постановщика помех главным образом при больших удалениях целей. Минимальные ошибки координат имеют место в том случае, если угол пересечения пеленгов составляет 90˚. На практике этот угол значительно меньше. Поэтому область пространства, в которой целесообразно использовать метод триангуляции, всегда ограничена.
Неодновременность пеленгования целей различными РЛС может оказать заметное влияние на точность определения координат лишь при больших значениях периода обзора Т0. Влияние этого фактора уменьшается, когда при решении триангуляционной задачи учитываются скорости изменения пеленгов V β и V ε , измеряемые РЛС.
Дополнительные трудности при реализации триангуляционного метода в АСУ возникают в том случае, когда в воздухе имеется несколько постановщиков помех. Если имеется m РЛС и n помехоносителей, то общее число пеленгов составляет mn, а количество точек пересечения прямых, подлежащих машинному анализу, равно
![]() (2.20)
(2.20)
Подавляющая часть точек пересечения пеленгов представляет собой ложные цели. Возникает проблема отделения ложных целей от истинных. Для этого применяется критерий совпадения в одной точке нескольких пеленгов (не менее трех). Решение задачи сопровождения помехоносителей существенно усложняется.
В силу трудности высокой точности определения координат постановщиков помех и сложности отделения истинных целей от ложных триангуляционный метод нашел пока ограниченное применение в АС войск ПВО СВ. Он используется при работе командных пунктов некоторых типов по наиболее опасным целям.
Автоматизированные системы управления позволяют эффективно использовать то обстоятельство, что противнику, как правило, не удаются подавить помехами все без исключения средства ПВО. Часто имеет место такая ситуация, когда цель, являющаяся постановщик» помех для радиолокационных средств одного диапазона, разрешается по всем координатам средством, работающим в другом диапазоне час тот.
Постановщики помех уничтожаются в первую очередь. Целеуказания по ним передается огневым единицам методом скользящего пеленга, сущность которого поясняется рис2.15 и 2.16.
П
Рис. 2.15. Размещение вектора скорости
изменения пеленга поставщика помех на
составляющие.
Для захвата цели станции наведения выдается целеукаание с дискретностью 5,9 с. Поиск цели производиться в стробе с центром в точке А или В (рис. 2.15) шириной по азимуту ±5˚по дальности ±10 км. За цикл целеуказания центр строба перемещается из точки А в точку В. Положение исходной точки определяется азимутом постановщика помех в момент начала в момент начала выдачи целеуказания и дальностью, установленной командиром (если командир дальность не установил, то Dmin принимается равной 10 км.)
П
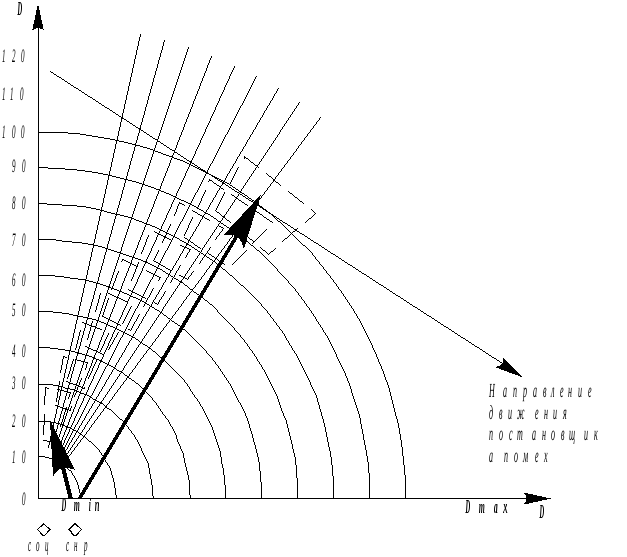 Рис.
2.16.
Рис.
2.16.
VD - скорость перемещения точки целеуказания по линии пеленга (принимается равной 1000 м/с);
- текущее значение азимута постановщика помех (рассчитывается путем преобразования прямоугольных координат точки, установленной оператором на линии пеленга);
D - текущее значение дальности до центра строба;
ω - угловая скорость перемещения азимута пеленга.
Значение ω рассчитывается по формуле
![]() (2.21)
(2.21)
где β2-β1 - азимуты постановщика помех, измеренные оператором в двух обзорах;
Т1, Т2 - моменты измерения азимутов оператором.
Алгоритм расчета координат очередной точки В включает определение составляющих скорости перемещения пеленга Vх, Vу и вычисление Хв, Yв:
Vх -
Vх β + Vх D
-
![]() βDsin
β + VD cosβ;
βDsin
β + VD cosβ;
Vy
- Vy β + Vy D
-
![]() βDsin
β + VD cosβ; (2.22)
βDsin
β + VD cosβ; (2.22)
Xb – Xa + Vx t цу
Eb – Ya + Vy t цу
где t цу - период решения задачи целеуказания.
Возможный вариант использования серии стробов, формируемых за время целеуказания по постановщику помех, показан на рис.2.16. В некоторых АСУ создаются две таких серии. В первой из них угол места цели принимается равным 8° (ширина строба поиска СНР по углу места составляет ±9° ), а дальность плавно изменяется от 20 до 110 км. Ко второй серии угол места равен 25°, а дальность изменяется от 20 до 60 км. Максимальное время занятости с учетом поиск и обстрела цели при этом составляет 209 с.
Применение в АСУ разнообразных способов обработки информации о постановках активных помех (отождествление пеленга и цели определение координат помехоносителей методом триангуляции, выдача целеуказания методом скользящего пеленга) позволяет существенно повысить качество управления огнем ЗРК войск ПВО СВ.