

VOYNA_1 / 4-1-2
.DOC-
АВТОМАТИЗАЦИЯ ОБРАБОТКИ ИНФОРМАЦИИ ОБ ОБСТАНОВКЕ
-
ПЕРВИЧНАЯ ОБРАБОТКА РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Первичная обработка радиолокационной информации производится на радиолокационных станциях или объектах АСУ и состоит в выделении из суммарного сигнала, полученного на выходе приемника, полезного (отраженного от цели) сигнала. Факт обнаружения этого сигнала обычно связывают с обнаружением цели. Одновременно в устройстве, осуществляющем первичную обработку, производится нумерация целей, определяются, кодируются, записываются в память ЭВМ или подготавливаются для передачи на другие устройства координаты обнаруженной цели.
Первичная обработка может производиться ручным, автоматизированным или автоматическим способами.
При ручном способе, применяемом в планшетной схеме управления средствами ПВО, обнаружение и определение координат цели производит оператор РЛС. Естественно, что никаких вычислений он не выполняет. Действия оператора определяются результатами визуальной оценки изображения на экране и эвристическими критериями. Так, цель обнаруживается по яркости отметки относительно иона. Координаты цели оцениваются по взаимному положению ее отметки и линий (меток) азимута и дальности. Считанные оператором координата передаются по каналам связи на пункты приема.
При автоматизированном способе съема координат целей используется схема, показанная на рис.2.1.
Г
Рис. 2.1. Схема
автоматизированного способа съёма
координат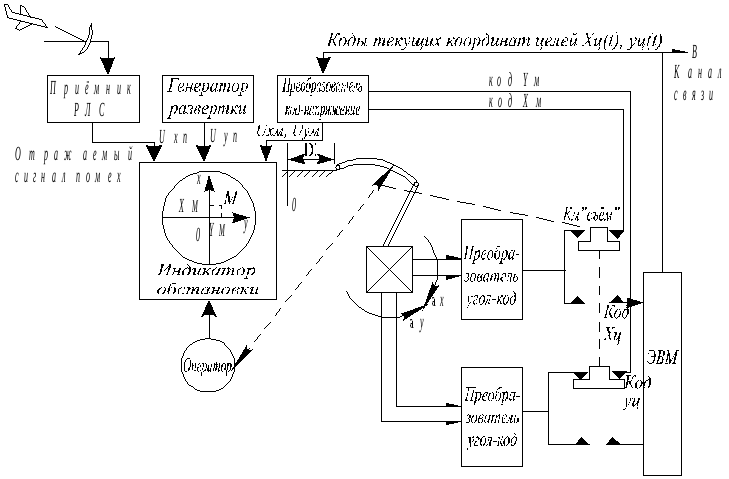
Обнаружив цель, оператор совмещает маркер с серединой переднего фронта отметки и нажимает кнопку СЪЕМ. Координаты маркера, равные в этот момент координатам цели, вводятся в ЭВМ. Вычислительная машина реализует алгоритмы вторичной обработки информации. По данным нескольких обзоров РЛС она рассчитывает составляющие скорости и текущие координаты цели, которые затем выдается на индикатор обстановки.
В зависимости от того, отображаются или но отображаются на экране индикатора текущие координаты целей, оператор АСУ работает в режиме максимальной производительности или в режиме по отклонению.
В
а) структурная
схема устройства; б) временные диаграммы.
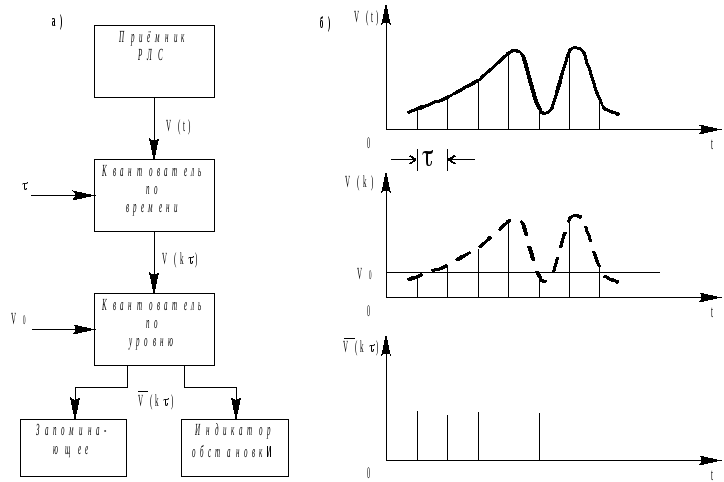 Рис.
2.2. Двоичное квантование радиолокационных
сигналов:
Рис.
2.2. Двоичное квантование радиолокационных
сигналов:
В режиме работы по отклонению оператор постоянно оценивает взаимное расположение на экране двух отметок: рассчитанного машиной текущего и измеренного РЛС фактического положения цели. Обнаружив рассогласование, оператор производит измерение координат и ввод их в ЭВМ. В этом режиме точность сопровождения цели обычно несколько выше и улучшаются условия работы оператора.
При автоматическом способе в АСУ используются специальная цифро-аналоговая аппаратура. Сущность процессов преобразования информации поясняется рис.2.2 и.2.3. О6работка радиолокационных сигналов начинается с их дискретизации. Процесс дискретизации разбивается на этапы квантования по времени и квантования по уровню. С введением временного квантования развертка дальности РЛС разбивается на элементарные участки размером
![]()
а общее число таких участков равно
![]() ,
,
где - период импульсов квантования;
с - скорость распространения электромагнитного излучения в атмосфере Земли;
Dmax - максимальная дальность обнаружения РЛС.
При выборе периода квантования учитывают ряд соображении.
Во-первых, необходимо обеспечить
максимальную вероятность пропуска
полезного сигнала. Для этого величина
не должна превышать
эффективную длительность отраженного
импульса.
Рис. 2.3. Обнаружение
пачки двоично-квантованных сигналов
![]() где кор -
интервал корреляции сигнала U(t),
получаемого с выхода приемника РЛС.
Квантование по уровню состоит в
сравнении входного сигнала U(k)
с пороговым уровнем U0.
Если U(k)
U0,
то квантователь выдает импульс стандартной
амплитуды и длительности, означающий
логическую единицу. Если U(k)
< U0,
то импульс в очередном временном
интервале длительностью отсутствует
(логический нуль). В
принципе в схеме квантователя могут
использоваться и несколько уровней
квантования, однако многоуровневые
устройства применения не нашли. В связи
с тем, что квантователи выдают только
два вида выходных сигналов, они получили
название бинарных или двоичных.
Двоично-квантовые сигналы поступают в
запоминающие устройства ЦВМ и на
индикаторы обстановки. При
вращении антенны с периодом Т0
и одновременной посылке зондирующих
импульсов с периодом Тn
зона обзора РЛС разбивается па элементарные
участки по азимуту (см. рис.2.3). Угловой
размер элементарного участка по азимуту
где кор -
интервал корреляции сигнала U(t),
получаемого с выхода приемника РЛС.
Квантование по уровню состоит в
сравнении входного сигнала U(k)
с пороговым уровнем U0.
Если U(k)
U0,
то квантователь выдает импульс стандартной
амплитуды и длительности, означающий
логическую единицу. Если U(k)
< U0,
то импульс в очередном временном
интервале длительностью отсутствует
(логический нуль). В
принципе в схеме квантователя могут
использоваться и несколько уровней
квантования, однако многоуровневые
устройства применения не нашли. В связи
с тем, что квантователи выдают только
два вида выходных сигналов, они получили
название бинарных или двоичных.
Двоично-квантовые сигналы поступают в
запоминающие устройства ЦВМ и на
индикаторы обстановки. При
вращении антенны с периодом Т0
и одновременной посылке зондирующих
импульсов с периодом Тn
зона обзора РЛС разбивается па элементарные
участки по азимуту (см. рис.2.3). Угловой
размер элементарного участка по азимуту
![]() Общее число таких участков
Общее число таких участков
![]()
Следовательно, при временном квантовании общее количество элементарных ячеек, на которые разбивается зона обзора РЛС, равно
![]() (2.1)
(2.1)
Каждой из ячеек в результате двоичного квантования амплитуд сигналов ставится в соответствие "1" или "0". Объем цифровых данных, подлежащих обработке в каждом обзоре станции, оказывается очень большим. Первоначально все данные запоминаются в оперативной памяти ЦВМ и отображаются на индикаторе обстановки. В дальнейшем они последовательно обрабатываются для каждого отдельно взятого кольца дальности. Обработка состоит в обнаружении пачки отраженных от цели двоично-квантовых сигналов и установлении границ н и к (начало и конец, см. рис.2.3).
В настоящее время основными способами обнаружения и фиксации границ пачки являются программные способы, сущность которых заключается в последовательном анализе двоичных сигналов, относящихся к выбранному кольцу дальности, и в проверке условий обнаружения начала и конца пачки. В качестве критерия начала пачки часто принимают появление некоторой совокупности их k единиц на заранеe зафиксированном количестве позиций l: "k из l (при k l)". Критерии типа "(k из l)" иногда называются программами (или логиками) начала пачки.
В качестве критерия конца пачки принимают наличие серия 1, 2 3, ..., s нулей подряд. Обнаружители, в которых для фиксации начала пачки используют программу "k из l", а для фиксации конца пачки - программу "s нулей подряд", называют программными обнаружителями типа "k/l – 0/s".
На рис.2.3 приведены временные диаграммы работы различных обнаружителей. Как видно из рисунка, с увеличением l и s возрастает систематическая ошибка измерения азимута
![]() (2.2)
(2.2)
В то же время при уменьшении l и s увеличивается вероятность обнаружения ложных целей и "расщепления" больших пачек на несколько малых.
Автоматическая обработка данных по описанным критериям может производиться аппаратными или программными средствами. Измеренные координаты цели, то есть D и , передастся с РЛС по каналам телекодовой связи на автоматизированные командные пункты для последующей обработки. Если первичная обработка информации производится в АСУ, то координаты D и записываются в специальные области памяти ЭВМ.