Сбор и обобщение данных о воздушной обстановке
Данные о воздушной обстановке, поступающие от одного источника, как правило, не дают полной картины о положении и характере действий целей и своих самолетов. Возможности радиолокационной станции по ведению разведки определяются не только по ее тактико-техническими характеристиками, но и зависят от занимаемой позиции радиоэлектронного противодействия противника, технического состояния аппаратуры, уровня подготовленности боевого расчета и других факторов. Поэтому полное представление о воздушной обстановки можно получить лишь в результате обобщения данных, поступающих с нескольких автоматизированных РЛС, связанных со станциями пунктов обработки информации.
Состав и форма представления данных, поступающих на пункты сбора информации, в разных системах управления могут существенно отличаться. В качестве примера рассмотрим один из нескольких типов сообщений, 'выдаваемых РЛС на машину обработки информации, структура которого показана на рис.2.9. В этом сообщении наряду с координатами целиX, Y и Н содержится и время локацииt1, а такжепризнаковхарактеризующих цель (ПП, ПГ), точность измерения координат(ПРС, ПНС), режим работыРЛС (ПТ) и системы передачи данных (ПОП).
Обработка поступающих данных начинается с распаковки сообщения и записывается в отдельную ему зону памяти оперативного запоминающего устройства. Дальнейшая обработка собранной информации производится в соответствии с алгоритмом, схема которого показана на рис. 2.10.
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
... |
16 |
17 |
... |
24 |
25 |
... |
36 |
37 |
... |
48 |
|
ПОП |
ПРС |
|
ПНС |
ПГ |
ПП |
ПТ |
tл |
Н(ПЭ) |
X |
Y | |||||||||
Содержание передаваемых данных:
ПОП - признак оповещения (ПОП=1, если в кодограмме передаютсяXиY);
ПРС - признак ручного съёма координат цели (ПРС=1, если съём ручной);
ПНС - признак немодулированного сигнала (ПНС=1, если РЛС работает в режиме
немодулированного сигнала);
ПГ - признак групповой цели (ПГ=1, если цель групповая);
ПП - признак принадлежности цели (ПП=01, если «чужой» и 10 или 11, если «свой»);
ПТ - признак текущего обзора (через обзор РЛС ПТ изменяется с 0 на 1, с 1 на 0);
tл - время локации цели (цена мл. разряда 0,16с; макс. значение 40с);
Н(ПЭ)- высота цели (цена мл. разряда 200м, макс. значение 51км), признак эшелона высоты (позиционный код четырёх эшелонов высоты);
X- координата целиX(цена мл. разряда 100м, макс. значение 204,7км);
Y- координата целиY (цена мл. разряда 100м, макс. значение 204,7км);
Рис. 2.9 Пример сообщения о воздушной обстановке (кодограмма №1)
Н
Рис.
2.10. Схема алгоритма решения задач сбора
и обобщения информации о воздушной
обстановке.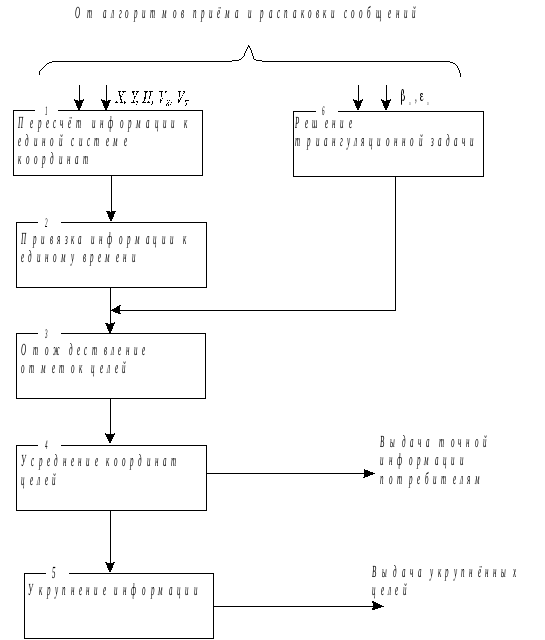
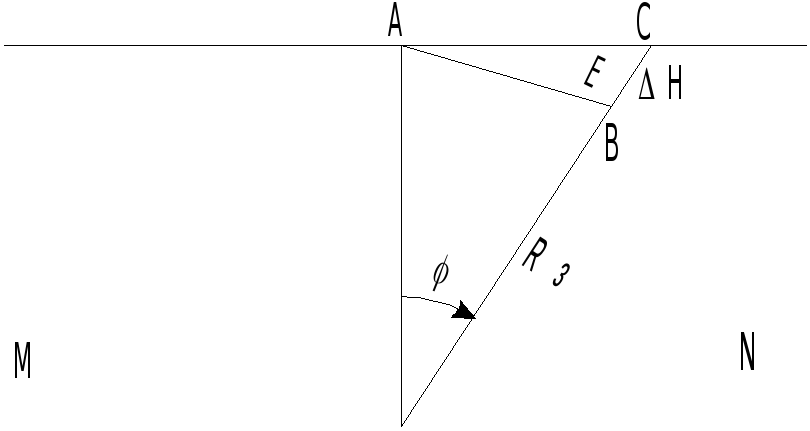
В АСУ ПВО СВ применяются несколько способов приведения данных единой системе координат. Выбор способа зависит от того, в каком звене управления применяется АСУ и какое максимальное расстояние может быть между источниками информации. При больших взаимных удаленьях источников может сказываться кривизна Земли.Оценим возникающие при этом ошибки пересчета координат целей.
Пусть в точках А и В расположены два источника информации, каждый из которых работает в прямоугольной топографической системе координат: ось Хнаправлена вдоль осевого меридиана зоны карты на север, осьХ- на восток, осьН-вверх перпендикулярно поверхности земного геоида, причем начало отсчета соответствует уровню Балтийского моря. На рис. 2.11 дуга МNпредставляет собой разрез земной поверхности вертикальной плоскостью, проходящей через пункты А и В.
Расстояние между пунктами А и В мало по сравнению с радиусом Земли Rз, поэтому угол φ является малым. Из рис.2.11 видно, что если вместо дуги 1, равной АВ .будет взята прямая АС касательная в точке А, то горизонтальное расстояние между точками А и В будет измерено с ошибкой
![]() = AC – АB
= Rзtgφ -1
= AC – АB
= Rзtgφ -1
Длину дуги l найдём по формуле1 = Rз φ
Разлагая tgφ в ряд и пренебрегая ввиду малостиφчленами выше третьей степени, получим
tg φ =φ+1/3φ3
Тогда ошибка определения горизонтального расстояния между точками А и В составит
 (2.13)
(2.13)
Угол САВ, образованный касательной и хордой в точке А, равен 1/2φ . В силу малости отрезок ∆Нможно рассматривать как дугу радиусаl.
Тогда
![]() (2.14)
(2.14)
Результаты расчета ∆1и ∆Нпредставлены в таблице 2.2.
Таблица 2.2
Рис.
2.11.
К определению ошибок пересчета координат
цели.