

5. Анализ неоднородности магнитного поля над дефектом
Привяжем прямоугольную систему координат к полю дефекта, направив ось z перпендикулярно поверхности ферромагнетика по центру трещины, ось х – параллельно поверхности, ось y – вдоль центрального сечения трещины (рис. 21). Очевидно, что составляющая Ну поля Нд над деталью равна нулю. Рассмотрим изменение поля по осям х и z по отдельно взятой кривой напряженности Hд в точках 1 – 5. Разложим вектор Hд в этих точках на составляющие вдоль линии намагничивающего поля (тангенциальная составляющая Нt) и перпендикулярную к нему (нормальная составляющая Нп).
Н
Рис. 21. Иллюстрация
неоднородности магнитного поля над
дефектом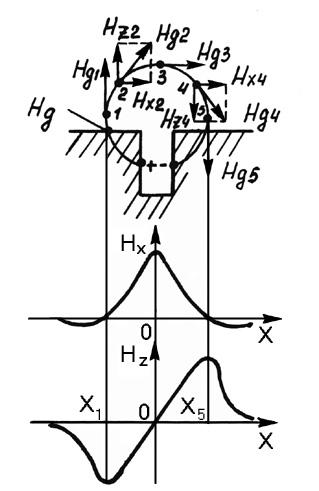
Видно, что тангенциальная состав-ляющая напряженности поля Hхимеет максимум в центральном сечении дефекта, а нормальная составляющаяHz, проходя через нуль в этом сечении, имеет максимальные положительные и отрицательные значения в точках, рас-стояние между которыми несколько превышает ширину (раскрытие) трещины. Таким образом, изменения двух параметров – Нхи Нz– в пределах нескольких миллиметров (обычно 10 – 12 мм) в направлении намагничивания в зоне дефекта дают полную характеристику неоднородности магнитного поля дефекта.
Значения нормальной и тангенциальной составляющих соизмеримы в точках экстремумов. Сканирование деталей при поиске с регистрацией дефектов при их обнаружении приводит к формированию импульсов, форма и длительность которых будет зависеть примерно в равной степени для Нп и Нt от конфигурации, размеров и глубины залегания трещины, а также от напряженности приложенного магнитного поля и магнитной проницаемости ОК. Тем не менее в практике контроля предпочитают иметь дело только с функцией Нz(х), которая за пределами дефекта «быстро» становится равной нулю. Это повышает достоверность контроля, к тому же постоянная составляющая функции Нх(х) является помехой.
Известно, что в слабых
магнитных полях, когда дифференциальная
проницаемость металла велика (участок
крутого подъема основной кривой
намагничивания), значительная часть
магнитного потока проходит в слое
металла под трещиной, вследствие этого
уменьшается индукция В0
в зоне трещины, кроме того, само значение
индукции мало. Все это приводит к
незначительному уровню магнитного поля
рассеяния над трещиной. В сильных
магнитных полях (область насыщения,
![]() )
это приводит к ослаблению магнитной
поляризации и, следовательно, к уменьшениюHд.
Существуют оптимальные величины
намагничивающего поля и магнитной
проницаемости металла, когда магнитное
поле Нд
при прочих равных условиях становится
наибольшим. Такой режим соответствует
магнитной индукции в металле порядка
0,8 – 0,9 Тл.
)
это приводит к ослаблению магнитной
поляризации и, следовательно, к уменьшениюHд.
Существуют оптимальные величины
намагничивающего поля и магнитной
проницаемости металла, когда магнитное
поле Нд
при прочих равных условиях становится
наибольшим. Такой режим соответствует
магнитной индукции в металле порядка
0,8 – 0,9 Тл.
Обратим внимание на то, что между точками х1 и х5 над дефектом, которые соответствуют экстремумам сигнала дефекта по Нz(х) (см. рис. 21), крутизна Нz(х) больше, чем в бездефектных зонах. Эта особенность может быть положена в основу метода магнитного контроля: измерять в каждой точке и сравнивать с порогом не значения функции Нz(х), а ее производной по координате х. Такая производная обозначается через Gz(х) и называется градиентом напряженности магнитного поля.
Представляется возможным, что, сравнивая функцию Нz(х) с некоторым фиксированным уровнем (порогом), можно безошибочно обнаружить дефект. в действительности же вне дефекта Нz(х) ≠ 0, а над дефектом Нz(х) значительно отличается от вида, представленного на рис. 22. Причинами этого можно назвать конечность размеров контролируемой детали, магнитные пятна, структурную неоднородность, резкие изменения сечения, шероховатость поверхности и др.
Реальная функция Нz(х) показана на рис. 22. Она представляет собой сумму Нz(х) сигнала дефекта (см. рис. 21) и случайной функции от названных выше причин, которую называют помехой. Помеха приводит к двум основным ошибкам дефектоскописта – пропуску (недобраковке) и ложному обнаружению дефекта (перебраковке). Очевидно, что невысокому значению отношения «сигнал/помеха» будет соответствовать большее количество ошибок.
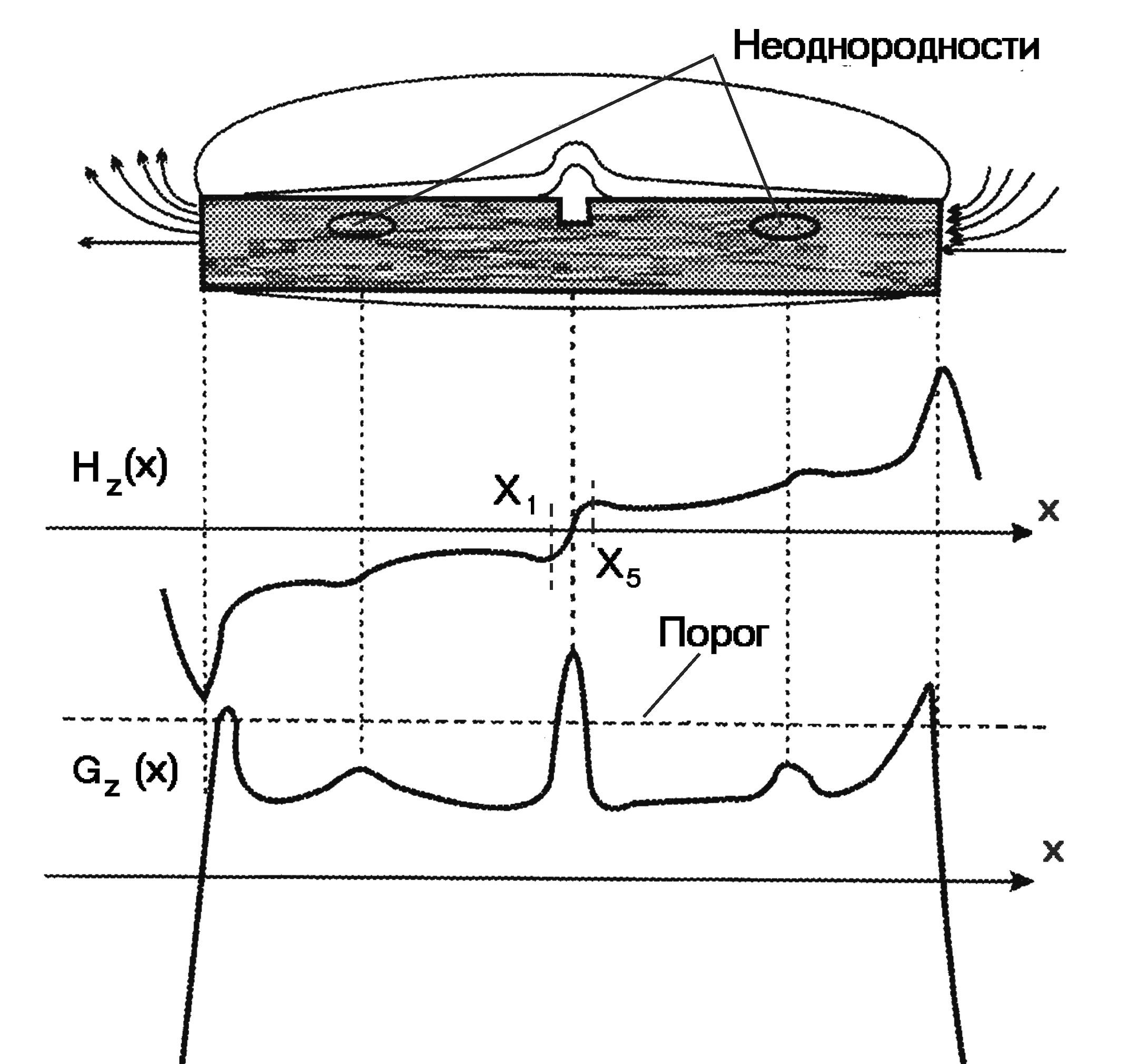
Рис. 22. Реальная функция градиента Hz(x)
На практике измерять градиент в виде производной сложнее и к тому же необязательно. Его величину оценивают как частное от деления разности значений напряженности в двух его соседних точках (последующей и предыдущей) в направлении намагничивания детали на расстояние между этими точками. Для однородных полей значение градиента равно нулю, для неоднородных – отлично от нуля. Различают градиенты по тангенциальной и нормальной составляющим, определяемым соответственно как
![]() и
и![]() .
(32)
.
(32)
Например, по рис. 21 определим
градиент нормальной составляющей поля
дефекта в точке 2 (i
= 2):
![]() Видно, что он будет отрицательным, так
как
Видно, что он будет отрицательным, так
как![]() ,
а
,
а![]() .
Следовательно, в направлении оси х
нормальная составляющая
поля убывает. Из рис. 22 видно, что
дифференцирование дало существенное
увеличение отношения «сигнал/помеха».
В магнитной дефектоскопии используют
градиент Gz(х),
который более четко характеризует
неоднородность магнитного поля рассеяния
над дефектом.
.
Следовательно, в направлении оси х
нормальная составляющая
поля убывает. Из рис. 22 видно, что
дифференцирование дало существенное
увеличение отношения «сигнал/помеха».
В магнитной дефектоскопии используют
градиент Gz(х),
который более четко характеризует
неоднородность магнитного поля рассеяния
над дефектом.