

Порядок выполнения работы
Изучить конструкции и особенности работы реостатных силовых контроллеров, используя теоретические сведения лабораторной работы.
Изучить конструкцию реостатных силовых контроллеров на полигоне железнодорожного транспорта СамГАПС.
Произвести снятие диаграммы замыкания и размыкания контактов.
Содержание отчета
Цель работы.
Эскиз реостатного силового контроллера и его привода.
Технические параметры реостатного силового контроллера.
Расположение устройства низковольтных блокировок.
Диаграмма замыкания и размыкания контактов.
Выводы.
Лабораторная работа № 3
Контроллеры машиниста эпс переменного тока
Цель работы: изучить конструкции и принцип действия контроллера машиниста ЭПС переменного тока на примере КМ-80.
Теоретические сведения
Контроллер машиниста предназначен для дистанционного управления электровозом в режимах тяги и рекуперативного торможения. Контроллер машиниста КМ-80 (рис. 3.1, 3.2) представляет собой многопозиционный аппарат и состоит из следующих основных узлов: кулачковых валов, кулачковых контакторов, механической блокировки, сельсинов, панели резисторов, блока конденсаторов. Все эти узлы установлены в каркасе, который представляет собой четыре рамы, скрепленные уголками 1, 6, 10, 12 (рис. 3.2, а) и рейками 2, 9, и закрыты кожухами 5, 7, 11, 14.
Группы контакторов и соответствующие им кулачковые валы составляют переключатели: главный 2 (см. рис. 3.1), реверсивный 3, тормозной 1. Кулачковые контакторы закрепляются на рейках.
Для исключения ошибочных действий машиниста все переключатели сблокированы между собой механической блокировкой, которая состоит из дисков, установленных на каждом валу, рычагов и пружин.
Механическая блокировка обеспечивает следующее взаимодействие между валами:
а) поворот реверсивной рукоятки из нулевого положения в любое рабочее возможен только при нулевых положениях тормозной рукоятки и штурвала главного вала;
б) поворот тормозной рукоятки из нулевого положения в любое рабочее положение возможен только при нахождении реверсивной рукоятки в положении ПП (Вперед или Назад) и при нахождении штурвала в любом рабочем положении, кроме 0;
в) поворот штурвала в любое рабочее положение возможен при нахождении реверсивной рукоятки в любом положении, кроме 0, и тормозной рукоятки в положении 0;
г) поворот реверсивной рукоятки из положения ПП в положения ОП1, ОП2, ОПЗ возможен при нахождении тормозной рукоятки в положении 0 и штурвала в любом положении;
д) поворот штурвала из положения ПО в положения 0 и БВ невозможен при нахождении тормозной рукоятки в зоне Торможение.
Привод кулачковых валов всех переключателей ручной. Рукоятка реверсивного переключателя съемная. Усилие переключения валов регулируют натяжением пружин 8 и 15 (см. рис. 3.2) с помощью гаек 13. Зазоры между дисками и рычагами регулируют болтами 3 и тягами 4.
Главный переключатель служит для управления электровозом в тяговом и рекуперативном режимах и имеет следующие положения: 0 - нулевое; ПО - подготовка к работе схемы управления ВИП; HP - начало регулирования; П1-П4 – I-IV зоны регулирования; БВ - быстрое выключение. Положения 0 и ПО - фиксированные, HP, П1-П4, БВ - нефиксированные, при этом положение БВ - с самовозвратом в положение 0.
На валу главного переключателя установлены две профильные шайбы которые через рычаги связаны с сельсинами Тяга (ЗДТ) и Рекуперация (ЗДР). Реверсивный переключатель служит для подачи команд на изменение направления движения электровоза (Вперед или Назад). Вал реверсивного переключателя расположен соосно с валом тормозного переключателя. Положения реверсивного переключателя следующие: 0 - нулевое; ПП Вперед - полное возбуждение при движении вперед; ОП1-ОП3 - соответственно первая, вторая и третья ступени ослабления возбуждения; ПП Назад - полное возбуждение при движении назад. Все положения реверсивного переключателя фиксированные.
Тормозной переключатель служит для управления электровозом в режиме рекуперативного торможения и плавного регулирования тока возбуждения двигателей. Положения тормозного переключателя следующие: 0 - нулевое; П - сборка силовой цепи; Торможение. Положения 0 и П, - фиксированные. Позиции зоны Торможение - нефиксированные.
На валу тормозного переключателя установлена профильная шайба, которая через рычаг связана с сельсином Возбуждение (ЗДВ). Шкалы главного и тормозного переключателей поворачиваются вместе с рукояткой и штурвалом и имеют подсветку, колпачок подсветки является указателем положений.
Устройство кулачкового контактора КЭ-153 показано на рис. 3.3.
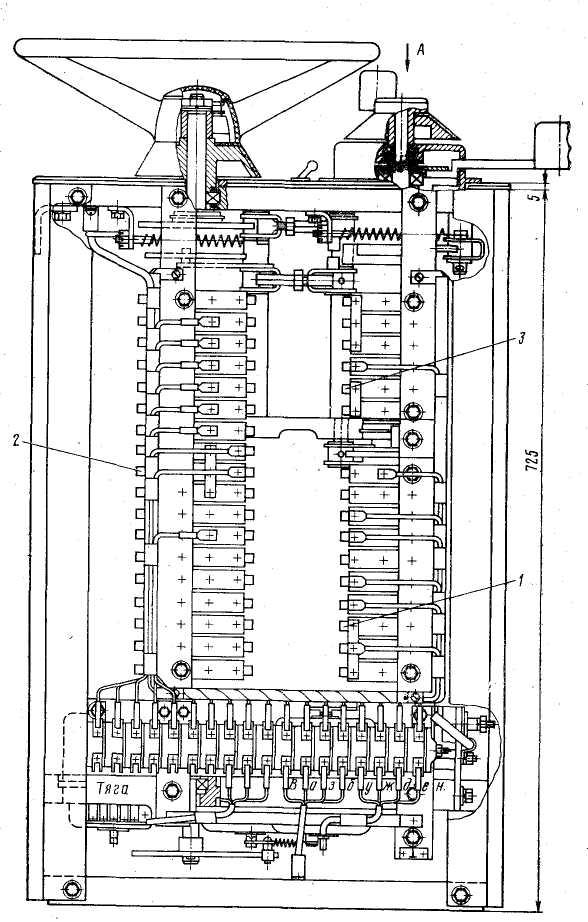
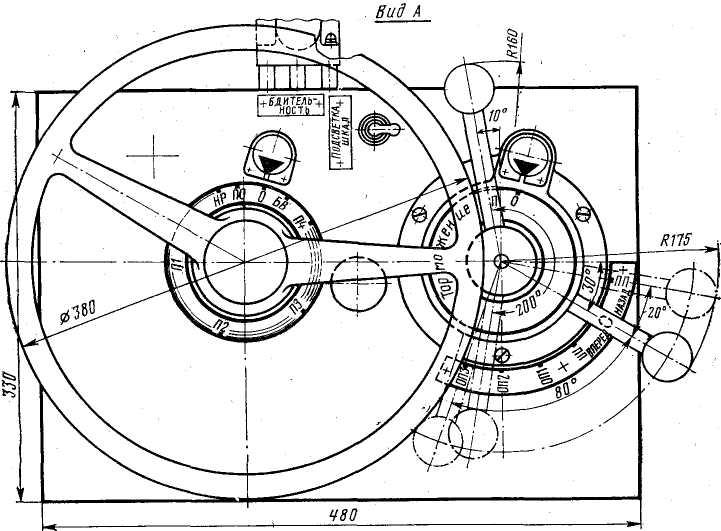
Рис. 3.1. Контроллер машиниста КМЭ-80
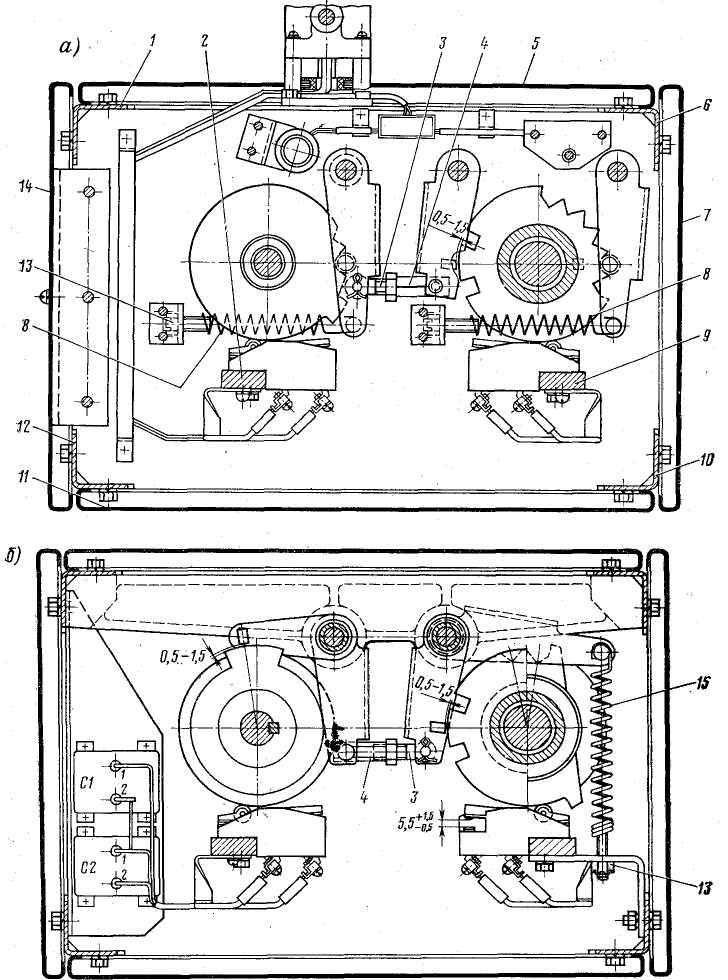
Рис. 3.2. Механическая блокировка валов контроллера машиниста КМЭ-80:
а — главного и реверсивного; б — главного, реверсивного и тормозного
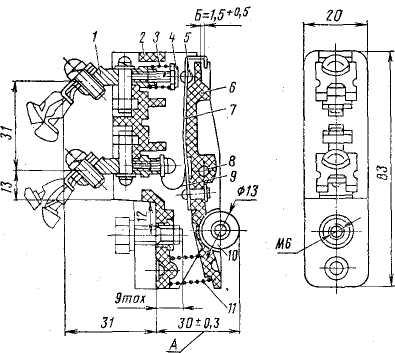
Рис. 3.3. Кулачковый контактор КЭ-153
Контактор состоит из изолятора, рычага, двух выводов, контактной системы и пружин. Латунные выводы подвижного и неподвижного контактов закреплены на изоляторе 2. Для удобства монтажа выводы наклонены по отношению к изолятору. В вывод 1 ввернут болт 4 с контактной напайкой из серебра. Пружина 3, опирающаяся на заплечик вывода 1 и головку болта 4, создает нажатие и предохраняет контактный болт от самоотвинчивания. За счет изменения степени ввинчивания болта в вывод регулируется положение ролика (размер А). Рычаг 6 из изоляционного материала вращается на оси 8 между щеками изолятора. От смещения в осевом направлении ось фиксируется пружинящим кольцом. На рычаге установлен ролик 10 и узел подвижного контакта. В качестве ролика применен закрытый подшипник. Подвижной контакт состоит из пружинящей пластины 7, серебряного контакта 5 и пластинчатого гибкого шунта 9. Формы рычага и пружинящей пластины выбраны так, что при замыкании контактов обеспечивается их провал и проскальзывание друг относительно друга. Провал контактов определяется зазором Б и обеспечивается подгибкой хвостовика пластины 7. Нажатие контактов создается включающей пружиной 11, воздействующей на хвостовик рычага 6. Для закрепления на аппарате изолятор армирован металлической гайкой. Контактор нормально замкнут. При воздействии кулачковой шайбы на ролик усилие включающей пружины преодолевается, и происходит размыкание контактов.
Устройство сельсина показано на рис. 3.4.
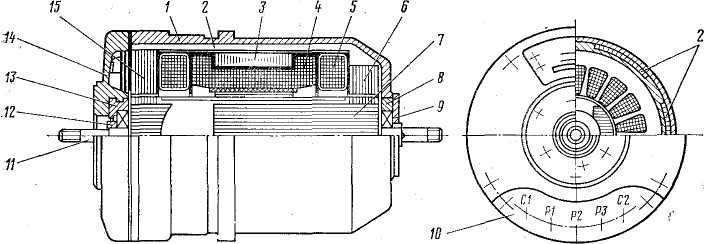
Рис. 3.4. Бесконтактный сельсин БД-501НА
Внутри корпуса 1, отлитого из алюминиевого сплава, запрессованы пластины внешнего магнитопровода 2, пакет статора 3 и кольцевые магнитопроводы 6 и 15. В пазы пакета статора уложены равномерно распределенные обмотки синхронизации 4, а между лобовыми частями этой обмотки и кольцевыми сердечниками магнитопроводов - катушки возбуждения 5, которые изолированы от лобовых частей обмотки и магнитопроводов 6 и 15 прокладками. В подшипниковом щите 14 и дне корпуса 1 установлены стальные втулки 13 и 8, обеспечивающие более надежную посадку подшипников. На подшипниковом щите винтами закреплена изоляционная панель 10 с зажимами: С1 и С2 — для подключения начала и конца катушек возбуждения, P1, Р2, РЗ — для выводов обмоток синхронизации.
Ротор 7 состоит из магнитопроводов с отверстиями, набранных из пластин электротехнической стали и склеенных клеем БФ-2. Внутрь этих магнитопроводов вставляют или целые валы 11 из немагнитного материала, или два коротких вала из конструкционной стали. Магнитопроводы и валы механически соединены между собой посредством заливки силумина. Для фиксации деталей на концах вала имеются кольца 12 с зубом. Подшипники с наружной стороны закрыты крышками 9.
Благодаря наличию отверстий в магнитопроводе ротора и немагнитного вала магнитный поток, создаваемый катушками возбуждения, имеет определенное направление. При повороте ротора меняется направление магнитного потока, а следовательно, и индуцированной в обмотках синхронизации ЭДС.