

3.6. Определение общего передаточного отношения заданного привода, а также простой и планетарной ступени зубчатого механизма.
Зубчатый ряд – механизм, в который входит два и более зубчатых колёс.
В зубчатом ряду колёса могут быть:
- ведущими – получают движение через вал, передают через зыбья;
- ведомыми – получают движение через зубья, передают через вал;
- промежуточные – получают и передают движения через зубья;
Передаточное отношение зубчатого ряда равно произведению передаточных отношений отдельных ступеней зубчатого ряда (равно дроби, в числителе которой записываем произведение чисел зубьев ведомых колёс, а в знаменателе – произведение чисел зубьев ведущих колёс).
Знак передаточного отношения зубчатого ряда будет (+), если число внешних зацеплений будет чётное; (-) – число зацеплений нечётное. Промежуточные колёса на величину передаточного отношения не влияют, но влияют на знак.
Эпициклическими – называются зубчатые механизмы с подвижными осями зубчатых колес. Эпициклические механизмы делятся на: планетарные (W=1) и дифференциальные (W>1).
Опорным – называется неподвижное центральное колесо.
Признаки планетарного механизма:
сателлиты и вадило (рычаг, который связан с сателлитом), наличие центрального (солнечного) неподвижного колеса.
Назначение планетарных механизмов – передача движения с заданным передаточным отношением. Назначение дифференциальных механизмов – сложение или разложение движений.
Обращённым – называется механизм (условный), который получается, если условно остановить водило, а угловые скорости всех остальные зубчатых колёс уменьшить на величину угловой скорости водила, тогда обращённый механизм представляет собой простой зубчатый ряд.
Комбинированный механизм – механизм, в состав которого входит одна или несколько планетарных ступеней или планетарная ступень и простые зубчатые ряды. Передаточное отношение комбинированного механизма определяется как произведение передаточных отношений отдельных ступеней этого механизма.
Замкнутым дифференциалом – называется зубчатый механизм, дифференциальная часть которого соединяется дополнительной кинематической цепью, представляющую собой чаще всего простой зубчатый ряд (W=1).
Вычерчиваем схему планетарного редуктора:
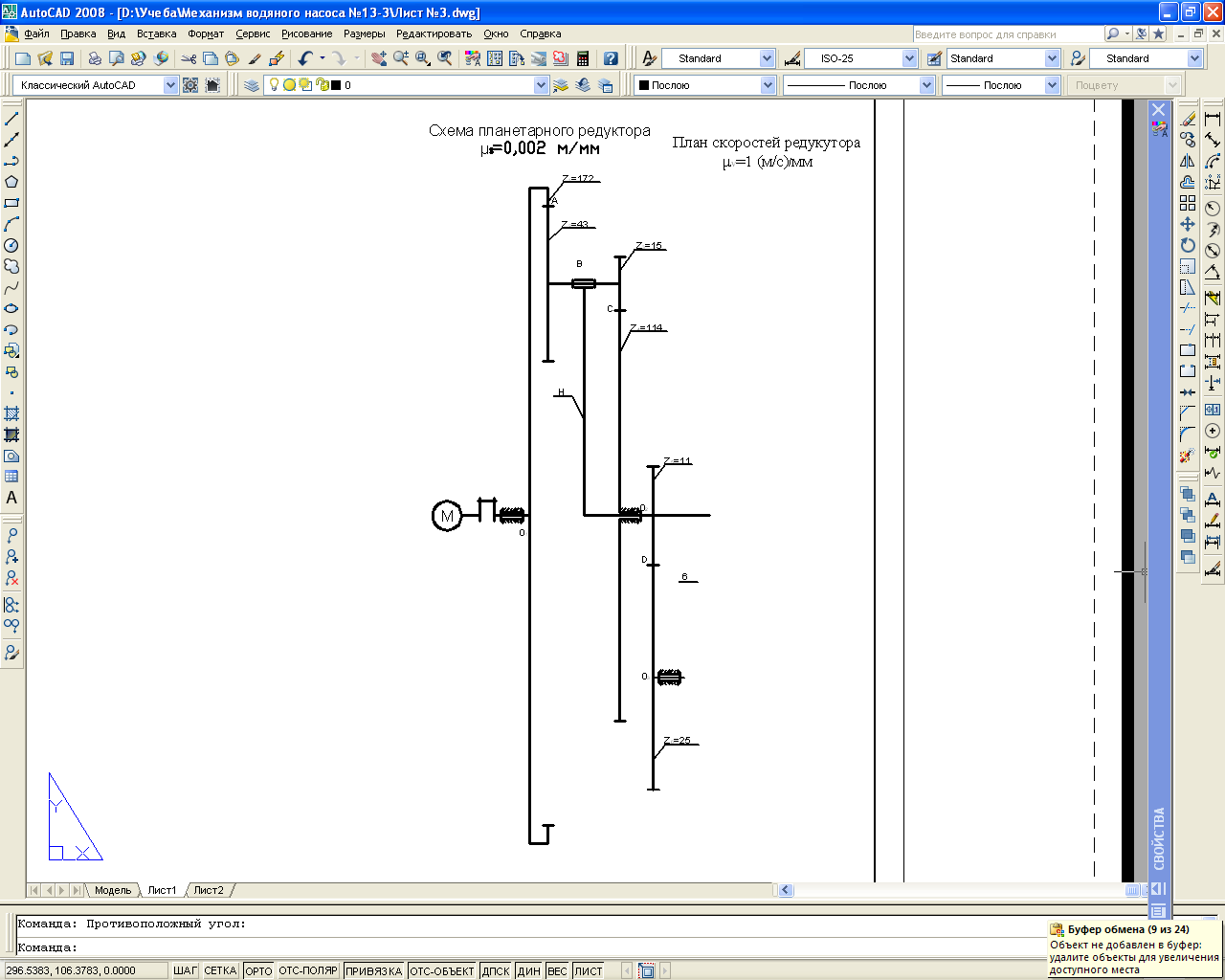
Рис.3.6.1. Схема планетарного редуктора.
Знак передаточного отношения – «+»;


m=10 мм; z5=11; z6=25;
 - общее передаточное
отношение;
- общее передаточное
отношение;
 - передаточное
отношение зубчатого ряда;
- передаточное
отношение зубчатого ряда;
 - передаточное
отношение планетарной части;
- передаточное
отношение планетарной части;
По формуле Виллиса:
 с.40 [4]
с.40 [4]
Для определения передаточного отношения планетарного механизма правую часть формулы Виллиса необходимо почленно на угловую скорость выходного планетарного механизма, и из полученного выражения определить требуемое передаточное отношение.
При синтезе планетарного механизма за основное условие принимали заданное передаточное отношение; в качестве дополнительного – условие соосности. Исходя из этих условий, подбираем числа зубьев всех колёс.
Проверяем, выполняется ли условие соосности.

Рассчитываем радиусы делительных окружностей:
Z1=172  мм;
мм;
Z2=43  мм;
мм;
Z3=15  мм;
мм;
Z4=114
 мм
мм
Для построения
планетарного редуктора выберем масштабный
коэффициент:

При синтезе планетарного механизма, в качестве дополнительного условия может быть также ипоьзовано:
условие соседства:
когда для обеспечения прочности и жёсткости зубчатого механизма, в редуктор устанавливается несколько сателлитов.
 где к – число
сателлитов; z2
– число зубьев сателлитов; z1
– число зубьев колеса, по которому
перемещаются сателлиты.
где к – число
сателлитов; z2
– число зубьев сателлитов; z1
– число зубьев колеса, по которому
перемещаются сателлиты.
условие сборки:
заключается в том, что при установке первого сателлита, солнечные колёса займут вполне определённое положение и может случиться так, что при установке следующего сателлита его зубья наложаться на зубья одного из центральных колёс, что воспрепятствует сборке.
условие:
 где к – число сателлитов;z1
и z3
– число зубьев центрального колеса; q
– целое число.
где к – число сателлитов;z1
и z3
– число зубьев центрального колеса; q
– целое число.
Сумма центральных солнечных колёс должна быть кратной числу сателлитов.