

Графопостроитель ху Graph
Назначение:
Строит график одного сигнала в функции другого (график вида Y(X)).
Параметры:
x-min – Минимальное значение сигнала по оси X.
x-max – Максимальное значение сигнала по оси X
y-min – Минимальное значение сигнала по оси Y.
y-max – Максимальное значение сигнала по оси Y
Sample time – шаг модельного времени.
Блок имеет два входа. Верхний вход предназначен для подачи сигнала, который является аргументом (X), нижний – для подачи значений функции (Y).
На рисунке, в качестве примера использования графопостроителя, показано построение фазовой траектории колебательного звена.

Constant – из Commonly Used Blocks
Чтобы установить необходимые параметры блока необходимо дважды щелкнуть на блоке, в параметрах задать значение константы =1.
Transfer Fcn – Continuous. Представляет собой отношение степенных полиномов. В параметрах для нашего случая необходимо задать числитель: Numerator – [1], и знаменатель: Denominator – [1 0.5 1].
Derivative - Continuous. Блок вычисляет значение производной.
XY Graph – Sinks. Вывод результата на график в виде зависимости X от Y.
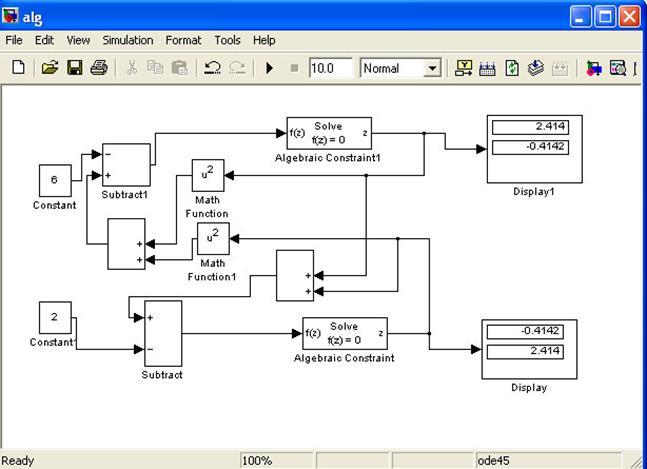
Блок алгебраического контура Algebraic Constraint
Назначение:
Выполняет поиск корней алгебраических уравнений.
Параметры:
Initial guess – Начальное значение выходного сигнала.
Блок находит такое значение выходного сигнала, при котором значение входного сигнала становится равным нулю. При этом входной сигнал должен быть прямо или опосредованно связан с входным сигналом.
На рисунке показан пример решения системы нелинейных уравнений вида:

Поскольку данная система уравнений имеет два решения, то начальные значения блоков Algebraic Constraint заданы в виде векторов. Для первого (верхнего) блока начальное значение задано вектором [1 -1], а для второго (нижнего) блока – вектором [-1 1].
Рассмотрим блоки, которые не использовались в предыдущем примере.
Subtract – Math Operations. В параметрах в окошке List of Signs надо поставить те операции, которые необходимы( - +).
Math Function - Math Operations. В параметрах в окошке Function надо выбрать square( чтобы был квадрат значения).
Algebraic Constant - Math Operations. В параметрах в окошке Initial guess задать начальное значение вектором [1 -1] или [-1 1].
Display – Sinks. Выводит результат.
Примеры:
alg.mdl
xyGraph.mdl
Дифференциальные уравнения и системы уравнений
Необходимо решить уравнение:
![]()
Попробуем решить его с помощью программы Simulink пакета MATLAB.
Метод решения дифференциальных уравнений отличается от традиционного. Нам необходимо создать схему уравнения. Необходимо будет создать обратную связь между выходными значениями интегратора и новым значением переменной. У нашего уравнения линейно изменяется x от 0 до 20. Поэтому для решения уравнения необходимо использовать блок Ramp. В конце обязательно должен быть интегрирующий блок, а из него результат выходит на осциллограф.
 Решение
уравнения выглядит так:
Решение
уравнения выглядит так:
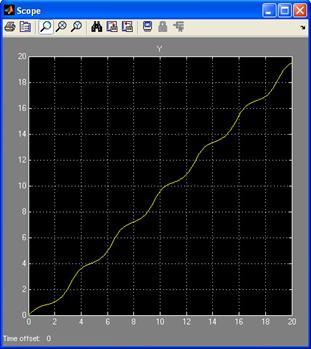 Результатом
будет график x
от y:
Результатом
будет график x
от y:
Рассмотрим из каких библиотек взяты использованные блоки.
Ramp – из Sources. Формирует линейный сигнал. В параметрах необходимо задать 1.
Add – Math Operations. В параметрах выбираем необходимые нам операции.
Gain – Math Operations. Коэффициент усиления сигнала. В параметрах ставим значение 3/2.
Sine Wave Function – Sources. Т.к. нам необходим косинус, то в параметрах Phase ставим pi/2.