

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Государственное образовательное учреждение
высшего профессионального образования
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ АЭРОКОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ
ОСНОВЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания
к выполнению лабораторных работ
Санкт-Петербург
2004
Составители: А. И. Таранчук, Г. А. Сапожников
Рецензент доктор технических наук, профессор С. В. Богословский
Методические указания предназначены для выполнения лаборатор- ных работ, связанных с процессом моделирования различных систем автоматического регулирования с помощью графической части пакета программ MATLAB – Simulink – в курсе дисциплин “Основы автомати- ческого управления”, “Автоматика и управление”, “Теория автомати- ческого управления”, “Основы автоматики и системы автоматического управления”.
Приводятся три лабораторные работы с краткими методическими рекомендациями по их выполнению.
Подготовлены кафедрой аэрокосмических приборов и измеритель- но-вычислительных комплексов и рекомендованы к изданию редакци- онно-издательским советом Санкт-Петербургского государственного университета аэрокосмического приборостроения.
© ГОУ ВПО СПбГУАП, 2003
Подписано к печати 10.02.04. Формат 6084 1/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 1,2. Уч. -изд. л. 1,4. Тираж 200 экз. Заказ №
Редакционно-издательский отдел
Отдел электронных публикаций и библиографии библиотеки
Отдел оперативной полиграфии
СПбГУАП
190000, Санкт-Петербург, ул. Б. Морская, 67
2
1. КРАТКИЕ РЕКОМЕНДАЦИИ К ПРИМЕНЕНИЮ ПАКЕТА SIMULINK
Simulink – это графическое расширение к Matlab для моделирования, анализа и синтеза систем управления. Системы управления в Simulink представляются в виде структурных схем, состоящих из блоков и ли- ний. Блоки используются для генерирования, преобразования и вывода сигналов. Линии используются для передачи сигналов от одного блока
к другому. Simulink интегрирован с Matlab, и все данные могут легко передаваться между программами.
Simulink вызывается из командной строки Matlab набором команды
Simulink или нажатием соответствующей пиктограммы.
При запуске Simulink открывает два окна.
Первое окно содержит библиотеку блоков (рис. 1.1).

Рис. 1.1
Второе чистое окно с именем untitled используется для построения
модели и выполняет функцию рабочего поля (рис. 1.2).
В библиотеке блоков содержатся следующие классы блоков:
Sources. Используются для генерирования сигналов.
Sinks. Используются для вывода информации или представления ее на экране.
Discrete. Линейные, дискретные во времени блоки (передаточные функции, модели в пространстве состояний и т. д.).
Linear. Линейные непрерывные блоки.
Nonlinear. Нелинейные операторы (квантователи, логические функ- ции, функции насыщения и т. д.).
Connections. Объединители и разделители векторов, блоки типа goto, from и т. д.
Для открытия любого класса блоков достаточно дважды щелкнуть левой кнопкой мыши по соответствующей пиктограмме. Назначение
1
всех блоков приведено в описании пакета Simulink. Необходимые блоки при нажатой левой кнопки мыши перетаскиваются из библиотеки на рабо- чее поле, например так, как показано в следующем окне (см. рис. 1.2).
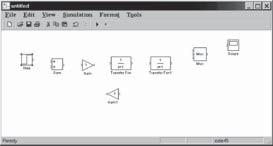
Рис. 1.2
Simulink автоматически присваивает имена блокам, появляющимся
на рабочем поле. Для одинаковых блоков Simulink добавляет цифры, так как это показано для двух передаточных функций. Для изменения имен блоков достаточно щелкнуть по ним левой кнопкой и ввести но- вое имя. Для изменения свойств блоков необходимо двойным щелчком мыши вызвать диалоговое окно. Например, после двойного щелчка по блоку Step появляется диалоговое окно (рис. 1.3).
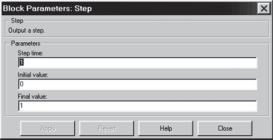
Рис. 1.3
2
В случае необходимости можно изменить заданные по умолчанию параметры:
время приложения ступенчатого воздействия (Step time = 1);
начальное значение (Initial time = 0);
величину ступени (Final value = 1).
Подробные сведения о свойствах блока и вводе параметров можно получить нажав клавишу Help в нижней части диалогового окна.
Для утверждения изменений следует нажать кнопки Apply и Close или просто дважды нажать ENTER.
Аналогично вызываем диалоговое окно для сумматора и последова- тельность + + заменяем на + - . В этом случае блок будет вычитать из величины, подаваемой на верхний вход (первый), величину, подавае- мую на нижний (второй) вход. Для сложения или вычитания более двух величин достаточно в диалоговом окне поставить соответствующее ко- личество знаков + и - .
Дважды щелкнем по блоку Gain и изменим коэффициент передачи на 2,5 и закроем диалоговый блок.
В первой передаточной функции Transfer Fcn изменим числитель (numerator) на [1 2], что соответствует полиному S+2, а знаменатель (denominator) на [1 0], что соответствует полиному S.
Во второй передаточной функции Transfer Fcn1 сохраним числи- тель [1], а знаменатель заменим на [1 2 4], что соответствует полиному S2 + 2S + 4.
Дважды щелкнем по блоку Mux и изменим количество входов с трех на два. Для разворота блока Gain 1 необходимо один раз щелк- нуть по нему мышью для выделения, открыть меню Format и выб- рать команду Flip Block. Другие команды из меню Format позволяют изменить тип и размер шрифта (Font…), переместить название (Flip Name), спрятать название (Hide Name), развернуть блок на 90° (Rotate Block), показать тень от блока (Show Drop Shadow), изменить цвет блока (Foreground Color), изменить цвет фона (Background Color), цвет экрана (Screen Color).
После корректировки параметров блоков и изменения подписей под ними рабочее поле примет вид, показанный на рис. 1.4.
Для соединения блоков перемещаем указатель линии к выходу блока
«Возмущение» до появления символа + , нажимаем левую кнопку мыши
и перемещаем мышь к верхнему (положительному) входу сумматора. Аналогично соединяются остальные блоки.
3

Рис. 1.4
Для проведения сложных по конфигурации линий можно временно
отпускать левую кнопку для фиксации отрезка и затем продолжать пе- ремещение при нажатой кнопке. Для образования ответвления от уже существующей линии, например для присоединения к блоку Mux (Объе- динитель) необходимо воспользоваться правой кнопкой мыши.
После соединения блоков на рабочем поле получается следующая схема, приведенная на рис. 1.5.
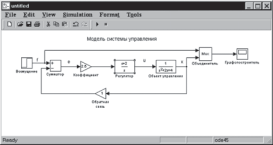
Рис. 1.5
Перед моделированием необходимо установить параметры моде-
лирования. Для этого обратимся к меню Simulation и выберем пункт Parameters. На экране появится диалоговое окно (рис. 1.6), которое позволяет изменить начальное время моделирования (Start time), ко-
4

Рис. 1.6
нечное время моделирования (Stop time), выбрать алгоритм модели- рования с переменным шагом (Variable-step) или с постоянным ша- гом (Fixed-step), метод моделирования. Если выбран постоянный шаг интегрирования, то следует задать его величину или записать команду auto для автоматического выбора шага программой. При выборе переменного шага интегрирования нужно задать абсолют- ную (Absolute) и относительную (Relative) погрешность. Задание параметров моделирования является этапом решения задачи, зави- сит от типа системы управления, обсуждается в специальных кур- сах, а также в учебном пособии [3].
Подробное описание всех настроек диалогового окна Parameters можно получить, нажав клавишу Help.
Для выполнения моделирования можно выбрать пункт Start из меню
Simulation или нажать кнопку .
Для вывода на экран графиков переходных процессов необходи- мо 2 раза щелкнуть по блоку Графопостроитель. В результате появ- ляется окно (рис. 1.7), содержащее ступенчатое возмущение и реак- цию на него системы управления.
Если переходных процессов на экране нет, то следует нажать кнопку автомасштабирования (изображен бинокль). Для получения копии про- цессов на бумаге следует нажать кнопку с изображением принтера. Для
5
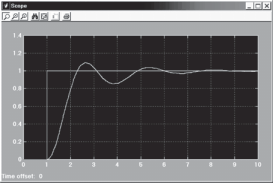
Рис. 1.7
изменения свойств графика можно нажать кнопку Properties (слева от
кнопки принтера) и воспользоваться появившимся диалоговым окном.
Для увеличения любого фрагмента графика до размеров окна мож- но выделить фрагмент нажатием левой кнопки мыши и передвиже- нием ее по экрану. В результате интересующий нас фрагмент должен быть обведен прямоугольником. После отпускания кнопки фрагмент увеличивается. Вернуться к исходному размеру можно, воспользо- вавшись кнопкой автомасштабирования. Дополнительную информа- цию по программе Simulink можно получить из электронного учеб- ника (на русском языке), из рассмотрения демонстрационных схем, обратиться к которым можно из блока Demo библиотеки блоков и из большого набора схем, доступ к которым осуществляется из блока Blocksets & Toolboxes библиотеки блоков.
Большое количество учебных пособий и описаний практических работ можно получить через Интернет (рис. 1.8, 1.9).
6

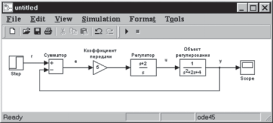
Рис. 1.8
7
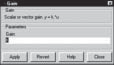
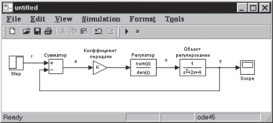
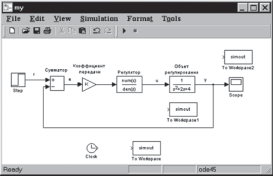
Рис. 1.9
8
2. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ ЛАБОРАТОРНЫХ РАБОТ
Лабораторная работа № 1
СИСТЕМА УПРАВЛЕНИЯ КУРСОМ ЛЕТАТЕЛЬНОГО АППАРАТА
Цель работы: 1) моделирование системы управления с помощью па- кета прикладных программ; 2) определение динамических параметров системы.
1. Краткое математическое описание системы
Упрощенная схема системы изображена на рис. 2.1, а, б (а – струк- турная схема, б – функциональная).
ст
3
ДУДУС ДУУ УС Р
f1(t)
САМОЛЕТ
Исполнительное
устройство Усилитель
Датчик углового
ускорения
Датчик угловой скорости
Датчик угла
Рис. 2.1
9
Система работает следующим образом. Отклонение самолета от заданного курса, т. е. углы рысканья самолета, принимаются малы- ми. Зависимостью движения самолета по курсу от движения по тан- гажу и от движения по крену пренебрегаем.
Система автоматического управления, изображенная на рис. 2.1, состоит из:
самолета – объекта управления;
автопилота – регулятора.
Основной задачей автопилота является автоматическое поддержание заданного курса летательного аппарата с определенной точностью.
Возмущающие воздействия (несимметричность тяги двигателей, порывы ветра и т. д.) отклоняют самолет от заданного курса.
Датчик угла (ДУ) – гироскоп направления – измеряет это откло- нение – угол Y , датчик скорости (ДУС) измеряет угловую скорость
Y1 этого отклонения , а датчик углового ускорения (ДУУ) – угловое ускорение Y2. Результаты измерений в виде электрических сигналов U1, U2, U3 поступают на вход усилителя , который одновременно является и суммирующим устройством. С выхода усилителя сигнал в
виде переменного тока поступает на исполнительное устройство – электродвигатель с редуктором, который через редуктор поворачи- вает рулевую поверхность на угол Y.
Система управления курса летательного аппарата [1] описывает-
ся следующей системой дифференциальных уравнений, записанных
в стандартной форме:
объект регулирования (“нейтральный самолет” – = 0)
(T1S + 1) S = -K1 + f1(t);
уравнения звеньев, входящих в регулятор:
измерители (гироскопы совместно с потенциометрическими дат- чиками):
уравнение усилителя
U1 = К3 , U2 = К13S , U3 = R113 S2;
(T3S + 1) I = K4U1 + К5U2 + К6U3;
уравнение исполнительного устройства (двигатель с редуктором)
(T4S + 1) S = K8I.
10
2. Подготовка исходных данных для моделирования
Исходные данные для моделирования системы приведены табл. 2.1.
Таблица 2.1
|
|
Вариант |
Т1, с |
К1, 1 с |
Кх, 1 |
Ку, 1 с |
К , 1 с |
1 |
|
1 |
1-1 |
0.2 |
1.2 |
2.0 |
х |
х |
1 |
|
2 |
1-2 |
0.3 |
1.4 |
2.4 |
х |
х |
1 |
|
3 |
1-3 |
0.4 |
1.6 |
2.8 |
х |
х |
1 |
|
4 |
1-4 |
0.5 |
1.8 |
3.2 |
х |
х |
1 |
|
5 |
1-5 |
0.6 |
2.0 |
3.6 |
х |
х |
1 |
|
6 |
1-6 |
0.7 |
2.2 |
4.0 |
х |
х |
1 |
Примечание: -Т3 = Т4 = 0; начальные условия нулевые; Кx = К3 К4К8,
Кy = К1
К К , К
= К11 К К .
3 5 8 z
3 6 8
Подготовка исходных данных для моделирования производит-
ся следующим образом. В каждом из шести предлагаемых вари-
антов из ше сти параметров, необходимых для моделирования, не-
известны два: Кy и Кz.
Для их нахождения необходимо проделать следующее:
1) используя уравнения объекта регулирования и регулятора, со- ставить единое дифференциальное уравнение системы в стандарт- ной форме записи;
2) “понизить” порядок дифференциального уравнения с учетом допущений, указанных в примечании к табл. 2.1;
В ре зульт ате динамиче ские проце ссы в системе управления курс а ЛА будут описываться дифференциальным уравнением 3-
го порядка;
3) построить границу устойчивости в плоскости двух неизвест- ных параметров (Кy и Кz) с использованием критерия устойчивости Вышнеградского;
4) по построенному графику зависимости Кz = f(Кy) определить область устойчивости системы;
5) выбрать неизвестные параметры Кy и Кz системы из найден- ной области устойчивости.
11
3. Порядок выполнения работы
Используя уравнения объекта регулирования – самолета и уравне- ния звеньев, входящих в регулятор, построим структурную схему систе- мы, приведенную на рис. 2.2.
f1(t)
1
(T1S 1)S
K1
(T1S 1)S
-
К3 К3S К 3 S 2
V1
K4
V2
K5
V3
K6
K8
(T4 S 1)S
T3S 1
I
T3S 1
T3S 1
Рис. 2.2
Упрощаем полученную модель с учетом того, что T3 = T4 = 0.
Применяя краткие рекомендации к пакету Simulink, набираем уп-
рощенную структурную схему системы управления курсом ЛА.
В передаточных функциях Transfer Fсп в числитель и знаменатель вводим параметры, соответствующие исходным данным для модели-
рования.
Возмущение f1(t) задаем в виде скачка Step. Регулируемый курс самолета Y регистрируется с помощью графопостроителя Scope.
Постоянные коэффициенты передачи устанавливаются с помо- щью блоков Gain.
Соединение блоков (звеньев), входящих в систему управления, осуществляется в соответствии со структурной схемой по рассмот- ренным ранее рекомендациям.
После соединения блоков на рабочем поле ПЭВМ получается ис- ходная модель.
12
Для выполнения моделирования нужно выбрать пункт Start из меню
Simulation или нажать кнопку >.
Процесс вывода на экран графиков переходных процессов изложен на с. 5–6 настоящих методических указаний.
4. Содержание отчета по лабораторной работе
Отчет должен содержать:
уравнение самолета и автопилота;
единое дифференциальное уравнение системы управления;
исходные данные для моделирования;
результаты поиска неизвестных параметров Кy и Кz ; упрощенную структурную схему системы управления; исходную модель системы;
графики переходных процессов;
выводы по работе.
Лабораторная работа № 2
СИСТЕМА УПРАВЛЕНИЯ КУРСОМ САМОЛЕТА
С ЗАКОНОМ РЕГУЛИРОВАНИЯ ПО ОТКЛОНЕНИЮ И ПЕРВОЙ ПРОИЗВОДНОЙ ПРИ НАЛИЧИИ ЖЕСТКОЙ ОБРАТНОЙ СВЯЗИ
Цель работы: 1) моделирование системы управления с помощью па- кета прикладных программ; 2) определение динамических параметров системы.
1. Краткое математическое описание системы
Упрощенная функциональная схема системы изображена на рис. 2.3.
f1 (t )
САМОЛЕТ
Обратная связь
Исполнительное
устройство Усилитель
Датчик угловой
скорости
Датчик угла
Рис. 2.3
13
Возмущающее воздействие отклоняет самолет от заданного курса. Датчик угла измеряет это отклонение – угол рысканья , а датчик угло- вой скорости измеряет первую производную 1 по времени от угла .
Результаты измерений в виде напряжений поступают на усилитель, который одновременно является и суммирующим устройством.
В системе осуществлена дополнительная жесткая отрицательная об- ратная связь по углу – углу перемещения руля.
С выхода усилителя сигнал поступает на исполнительное устрой- ство, которое приводит в действие руль ЛА.
САУ описывается следующей системой дифференциальных уравне- ний, записанных в стандартной форме:
объект регулирования (“нейтральный самолет” – = 0)
(T1S + 1) S = -К1 + f1(t);
уравнения звеньев, входящих в регулятор:
измерители (гироскопы совместно с потенциометрическими датчи- ками):
обратная связь
U1 = К3,
3
U4 = -К9;
уравнение усилителя с сумматорами
(T3S + 1) I = К4U1 + К5U2 + К7U4;
уравнение исполнительного двигателя с редуктором
(T4S + 1) S = К8I.
2. Подготовка исходных данных для моделирования
Исходные данные для моделирования системы сведены в табл. 2.2.
Таблица 2.2
Вариант
1, с
К1, 1 с
1
ст
град
Кх, с
Ку, с
К с
1 2-1
3.0
3.6
1.4
1.8
х х х
2 2-2
3.5
3.8
1.6
2.0
х х х
3 2-3
14
4.0
3.9
1.8
2.2
х х х
Окончание таблицы 2.2
Вариант
1,
с
К1,
1
с
1
,
град
Кх,
с
Ку,
с
К
с
4
2-4
4.5
4.1
2.0
2.4
х
х
х
5
2-5
5.0
4.3
2.2
2.6
х
х
х
6
2-6
5.5
4.5
2.4
2.8
х
х
х
Примечание: -T3 = T4 = 0; начальные условия нулевые; Кx= К3 К4
К8, Кy= К13К5К8, Кос= К7К8К9.
Подготовка исходных данных для моделирования производится сле-
дующим образом.
В каждом из шести предлагаемых вариантах из семи параметров, необходимых для моделирования , неизвестны три: Кx, Кy, Кос.
Для их нахождения необходимо проделать следующее:
1) используя уравнения объекта регулирования и регулятора, со- ставить единое дифференциальное уравнение системы;
2) “понизить” порядок дифференциального уравнения с учетом допущения -T3 = T4 = 0. В результате динамические процессы в сис- теме будут описываться уравнением 3-го порядка;
3) подставив в полученные уравнения вместо переменных их ус- тановившиеся значения и соответственно с этим положив все про- изводные равными нулю, получить уравнение статики в виде
К1Кxст = Косf1(t), (2.1)
откуда
Кx = (f1(t)Кос)/(K1ст). (2.2)
Подст авив в уравнение (2.2) изве стные исходные данные из табл. 2.2 и переходя от градусов к радианам, найдем
Kx = f(Kос); (2.3)
4) выразив в едином дифференциальном уравнении коэффициент
Kх через Kос согласно соотношению (2.3), получим уравнение, в котором вместо трех неизвестных Kx, Ky и Kос будут только две неиз- вестные величины Kос и Ky;
5) по строить границу устойчивости в пло скости неизвестных
параметров (Kос и Ky) с помощью критерия устойчивости Выш-
неградского;
15
6) по построенному графику зависимости Ky = f(Kос) определить об- ласть устойчивости системы;
7) выбрать неизвестные параметры Kос и Ky системы из найденной области устойчивости.
3. Порядок выполнения работы
Используя уравнения самолета и автопилота, построим структур- ную схему системы, приведенную на рис. 2.4.
f1 (t )
1
(T1S 1)S
K1
(T1S 1)S
-
К 9 К3 К3
K8
(T4 S 1)S
I
1
T3 S 1
V4 V2 V1
К4 К5 К7
Рис. 2.4
Упрощаем полученную модель с учетом того, что Т3 = T4 = 0.
Набор упрощенной структурной схемы и сам процесс моделирова-
ния выполняется так же, как и в предыдущем варианте.
4. Содержание отчета по лабораторной работе
Отчет должен содержать:
уравнение самолета и автопилота;
единое дифференциальное уравнение системы управления;
исходные данные для моделирования;
результаты поиска неизвестных параметров Ky и Kос; упрощенную структурную схему системы управления; исходная модель системы;
графики переходных процессов;
выводы по работе.
16
Лабораторная работа № 3
СЛЕДЯЩАЯ СИСТЕМА
Цель работы: 1) моделирование системы управления с помощью па- кета прикладных программ; 2) определение динамических параметров системы.
1. Краткое математическое описание системы
Функциональная схема следящей системы приведена на рис. 2.5, а, б
(а – структурная; б – функциональная). Система предназначена для сле- жения в реальном времени и постоянном масштабе вала управляемого объекта УО за положением задающего вала ЗВ. Вращением рукоятки задается произвольный закон для угла поворота задающего вала ЗВ во времени (t). Тот же закон угла поворота во времени должен быть авто- матически воспроизведен в заданном масштабе и в реальном времени
на выходе следящей системы (t), т. е. на управляемом объекте УО.
I2
Р1
Мд U1
1
R 1 R 2
U2 У
Г Д УО
Р2
ОС
1
Датчик согласования
Исполнительное устройство
Усилитель
Дифференци-
рующая цепь
Датчик угла
Рис. 2.5
17
Для этой цели угол поворота на выходе (t) передается с помощью вала обратной связи ОС на вход системы, где он вычитается из задавае- мого угла (t). Вычитание осуществляется с помощью механического дифференциала МД. Механический дифференциал, выполняющий фун- кцию датчика рассогласования, сравнивает углы поворота задающего вала ЗВ и вала обратной связи ОС. Поскольку датчик рассогласования должен сравнивать величины одного масштаба, в цепь обратной связи включен редуктор Р, задачей которого является изменение масштаба угла
. Если угол поворота (t) задающего вала ЗВ не равен углу поворота
1(t) вала обратной связи ОС, то третий валик дифференциала МД по- вернется на разность этих углов (t) = (t) - 1(t).
Полученное рассогласование (t) с помощью потенциометра П пре- образуется в напряжение U1, которое через дифференцирующий кон- тур, состоящий из емкости С и сопротивлением R1 и R2 подается на вход усилителя У. Усиленный усилителем ток поступает на обмотку воз- буждения генератора Г, цепь якоря которого последовательно соедине-
на с цепью якоря двигателя Д, который через редуктор Р поворачивает выходной вал управляемого объекта УО на угол = K0.
Если 1 = , то сигнала рассогласования нет, двигатель обесточен и вращения вала двигателя не будет.
Следящая система описывается следующей системой дифференци- альных уравнений:
уравнение управляемого объекта с двигателем в операторной форме
(T1S + 1) S = K1I2 - f (t);
уравнение обратной связи
1 = 1/K0;
уравнение датчика рассогласования
1;
уравнение потенциометра
U1 = K2;
уравнение дифференцирующего контура
(T2S + 1)U2 = K3(T5S + 1)U1,
где T2 = (СR1R2)/(R1 + R2); T5 = R1С ; K3 = R2/(R1+R2).
Постоянная времени T2 определяет методическую ошибку системы при дифференцировании.
18
Для уменьшения этой ошибки рекомендуется придерживаться сле- дующего соотношения T2 = 0.1T5.
Уравнение усилителя
(T3S + 1) I1 = K4U2. Уравнение цепей якорей
(T4S + 1) I2 = K5I1 - K6S.
2. Подготовка исходных данных для моделирования
Исходные данные для моделирования приведены в табл. 2.3.
Таблица 2.3
|
/ |
Вариант |
1, с |
К0 |
), рад |
, угл.ст ин
|
, рад/с |
|
1 |
3-1 |
0.10 |
0.75 |
1.0 |
1 |
0.5 |
|
2 |
3-2 |
0.15 |
0.50 |
0.9 |
2 |
0.8 |
|
3 |
3-3 |
0.20 |
1.75 |
0.8 |
3 |
1.0 |
|
4 |
3-4 |
0.25 |
1.00 |
0.7 |
4 |
1.5 |
|
5 |
3-5 |
0.30 |
1.25 |
0.6 |
5 |
1.7 |
|
6 |
3-6 |
0.35 |
1.50 |
0.5 |
6 |
2.0 |
Примечание: следует принять Т3 = Т4 = К6 = 0; начальные условия нулевые; К* = К1 К2К3К4К5/К0.
Неизвестными параметрами при моделировании следящей системы являются: общий коэффициент усиления системы в разомкнутом состоя- нии K*; параметры дифференцирующего контура T2, T5 и K3.
Подготовка данных для моделирования выполняется следующим образом.
В каждом из шести предлагаемых вариантов из девяти параметров, необходимых для моделирования, неизвестны четыре: K*, K3, T2 и T5.
Для их нахождения необходимо проделать следующее:
1) используя уравнение управляемого объекта и уравнения звеньев, входящих в состав регулятора, составить единое дифференциальное урав- нение следящей системы;
2) “понизить” порядок дифференциального уравнения с учетом до- пущения T3 = T4 = K6 = 0. В результате динамические процессы в систе-
ме будут описываться уравнением 3-го порядка вида
19
[T1T2S3 + (T1 + T2)S2 + (K*T5 + 1)S + K*] =
= [T1T2S3 + (T1 +T2)S2 + S] + 1/K0 (T2S + 1) f(t);
3) подставив в полученное уравнение вместо переменных их устано-
вившиеся значения и соответственно с этим положив все производные равными нулю, получить уравнение статики в виде
K*ст = 1 + 1/к0 f (t), (2.4)
откуда
K* = ( 1 + f(t)/K0) ст. (2.5)
Подставив в уравнение (2.5) известные данные из табл. 2.3, подсчи-
таем общий коэффициент усиления системы в разомкнутом состоянии;
4) воспользовавшись тем, что T2= 0.1 T5, получим уравнение, в кото- ром вместо четырех неизвестных K*, K3, T2 и T5 будут только две неиз- вестные величины K3 и T5;
5) построить границу устойчивости в плоскости неизвестных пара- метров (K3 и T5) с помощью критерия устойчивости Вышнеградского;
6) по построенному графику зависимости K3 = f(T5) определить об-
ласть устойчивости;
7) выбрать неизвестные параметры K3 и T5 системы из найденной области устойчивости.
3. Порядок выполнения работы
f1(t)
1
(T1S 1)S
I 2
K5
T4 S 1
K1
(T1S 1)S
K6S T4 S 1
КО
1
I 1 K4
T4 S 1
V2 Kэ (T5S 1) V1
2
К
Рис. 2.6
20
Используя уравнения управляемого объекта и звеньев регулятора следящей системы, построим структурную схему системы, приведенную на рис. 2.6. Упрощаем полученную модель с учетом того, что T3 = T4 = 0.
Набор упрощенной структурной схемы и сам процесс моделирова-
ния выполняется так же, как и в предыдущем варианте.
4. Содержание отчета
Отчет должен содержать:
уравнение самолета и автопилота;
единое дифференциальное уравнение системы управления;
исходные данные для моделирования;
результаты поиска неизвестных параметров Ky и Kос; упрощенную структурную схему системы управления; исходную модель системы;
графики переходных процессов;
выводы по работе.
Библиографический список
Теория автоматического управления / Под ред. А. А. Воронова. М.: Высшая школа, 1986.Ч. 1 . 303 с. Ч. 2. 228 с.
Попов Е. П. Теория линейных систем автоматического регулирования и уп-
равления . М.: Наука, 1978. 226 с.
Попов Е. П. Теория нелинейных систем автоматического регулирования и
управления. М.: Наука, 1979. 255 с.
Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования.
М.: Наука, 1975. 767 с.
Ерофеев В. М., Глушенко В. И. Учебное пособие к курсовой работе по теории
автоматического регулирования / Под ред. В. М. Кушуля; ЛИАП. Л., 1977. 105 с.
Ерофеев В. М., Глушенко В. И., Кушуль В. М. Учебное пособие к курсовой
работе по теории автоматического регулирования/ Под ред. В. М. Кушуля;
ЛИАП. Л., 1980. 87 с.