

2. Использование MatLab
В системе MatLab существует команда zpk для преобразования модели, заданной ПФ, в модель, заданную нулями, полюсами и обоб- щенным коэффициентом передачи (zpk-форма).
Пример:
>> w=tf([10],[2 2 3 1 0]) Trап8fer fuпctioп:
10
————————————
2 8^4 + 2 8^3 + 3 8^2 + 8
>> w1=zpk(w) Zero/pole/gаiп:
5
——————————————————
8 (8+0.3966) (8^2 + 0.60348 + 1.261)
39
для работы с корневым годографом удобно использовать графи- ческий интерфейс «SISO-Design Tool», предназначенный для анали- за и синтеза одномерных линейных систем автоматического управ- ления (SISO – Single Input/Single Output).
Запуск SISO-Design Tool осуществляется командой
>> 8i8otool
В появившемся окне графического интерфейса необходимо исполь- зовать команду «File/Import» для загрузки данных из рабочего про- странства MatLab, в результате которой появляется диалоговое окно Import System Data (рис. 1).
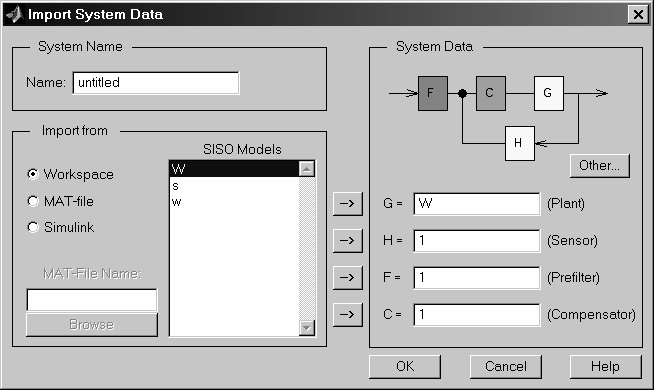
Рис. 1. Диалог для ввода параметров модели
После импортирования данных можно исследовать изменение вре- менных и частотных характеристик замкнутой системы при измене- нии К. Обычно при этом требуется определить условия неустойчиво- сти замкнутой САУ. Определить Kкр и кр.
На рис. 2 показано окно sisotool для описанной выше модели w1. двигая красным курсором по КГ до пересечения ветвей с мнимой осью, можно определить значение Kкр. В данном случае Kкр О,1. Значе- ние кр соответствует мнимой координате пересечения КГ мнимой оси. Просмотреть это значение можно в нижней части интерфейса или выбрав меню «View/Closed-Loop Poles».
4О
Рис. 2. Основное окно SISO Design tool
3. Задание на лабораторную работу
Построить КГ в соответствии с вариантом из таблицы при помо- щи графического интерфейса sisotool.
Исследовать динамику замкнутой системы при различных значе- ниях коэффициента усиления разомкнутой системы К, в том числе:
– запасы устойчивости в частотной области;
Варианты передаточных функций
Таблица
¹
п/п
Значения параметров
Передаточная функция
разомкнутой системы
1 Т = О,1, = 1
2 Т = О,О5, = О,7О7
3 Т = О,О3, = О,1
4 Т = О,О8, = О,5
5 Т = О,О1, = О,15
К
$(Т2$2 2Т$ 1)
41
Окончание табл.
¹
п/п
Значения
параметров
Передаточная
функция
разомкнутой
системы
6
Т
=
О,О3,
Т
=
О,5,
Т
=
О,1,
Т
=
О,О5
1
2
3
4
К(Т1$
1)
$(Т2$
1)(Т3$
1)(Т4$
1)
7
Т1
=
О,О5,
Т2
=
О,4,
Т3
=
О,О8,
Т4
=
О,О33
8
Т1
=
О,2,
Т2
=
О,45,
Т3
=
О,1,
Т4
=
О,О5
9
Т
=
О,5,
Т
=
О,25,
Т
=
О,1,
Т
=
О,О2
1
2
3
4
1О
Т
=
О,1,
Т
=
О,25,
Т
=
О,1,
Т
=
О,О5
1
2
3
4
11
Т1
=
О,2,
Т2
=
О,1,
Т3
=
О,О5,
Т4
=
О,О7,
=
О,5
К(Т1$
1)
12
Т1
=
О,О7,
Т2
=
О,1,
Т3
=
О,О5,
Т4
=
О,О7,
=
О,5
13
Т1
=
О,3,
Т2
=
О,1,
Т3
=
О,О5,
Т
=
О,О7,
=
О,5
14
Т1
=
О,О1,
Т2
=
О,1,
Т3
=
О,1,
Т4
=
О,О7,
=
О,5
15
Т1
=
О,
Т2
=
О,1,
Т3
=
О,1,
Т4
=
О,О7,
=
О,5
2
3
4
4
– параметры переходного процесса во временной области.
4
– краткие теоретические сведения;
– анализ результатов построения КГ;
– выводы.
42
Лабораторная работа №7
ИССЛЕДОВАНИЕ ПИД-РЕГУЛЯТОРОВ