

Методичка - ТАУ и МАТЛАБ
.pdf-11 -
2.РАБОТА 2. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ СИСТЕМЫ АВТОМАТИЧЕСКОГО ПРАВЛЕНИЯ
2.1.Применение критерия устойчивости Найквиста.
Для расчета и анализа линейной САУ ее передаточная функция должна быть представлена в Матлабе в виде ЛВИ(LTI) – модели (ЛВИ - Линейная Время-Инвариантная). Матлаб обеспечивает возможность построения 4 видов моделей: TF(ПФ - передаточной функции), ZPK(НПК - нули-полюса-коэффициент), SS(ПСпро- странство состояния) и FRD(ЗЧО - значения частотного отклика). В этой работе применяются TF- и ZPK - модели.
2.1.1. Построение годографа Найквиста с использованием tf - модели для исследования устойчивости
САУ с передаточной функцией разомкнутой системы вида: |
|
1) |
|
|
|
||||
|
|
|
|
|
+ |
|
|
|
|
|
|
W(s) := |
k |
(T1 s |
|
, |
|
(2.1) |
|
|
|
(TB s + 1)(T2 s + 1)s |
|
||||||
где k =50 (исходное значение), Т1= 0,02; Т2 = 0,03; ТВ 00,1…10. |
|
||||||||
k=50;TB=0.5;ch=k*[0.02 1];zn=[0.03*TB TB+0.03 1 0]; Wp=tf(ch,zn),nyquist(Wp) |
|
||||||||
Transfer function: |
|
|
|
|
|
|
|||
|
|
|
|
|
|
||||
|
|
s + 50 |
|
|
|
|
|
(2.2) |
|
------------------------ |
|
|
|
|
|
|
|
||
0.015 s^3 + 0.53 s^2 + s |
|
|
|
|
|
|
|||
Первая строчка в (2.2) - набор в Командном ок- |
|
|
|
|
|
|
|||
|
|
|
|
|
|
||||
не; остальные строчки и рис.2.1 - сообщения Матлаба |
|
|
|
|
|
|
|||
(дополнительные надписи и построения на рисунке - |
|
|
|
|
|
|
|||
см. подрисуночный текст). ch, zn - числитель и знаме- |
|
|
|
|
|
|
|||
натель; в квадратных скобках - векторы коэффициен- |
|
|
|
|
|
|
|||
тов многочленов от s числителя и знаменателя пере- |
|
|
|
|
h |
|
|||
даточной функции (2.1). |
|
|
|
|
|
||||
Участок годографа на рис.2.1 получен из ис- |
|
|
|
|
|
|
|||
ходного применением команды Контекстное меню- |
|
|
|
|
|
ω2 |
|||
«Zoom on (-1,0)» и 2-кратным применением проце- |
|
|
ω1 ( |
О1 |
|||||
дуры увеличения выбранной области: нажмите |
|
|
|||||||
кнопку |
|
, при нажатой ЛКМ выделите прямо- |
|
|
|
|
|
|
|
угольником выделения выбранную область и отпустите ЛКМ(произойдет увеличение), повторите процедуру с выделением.
Внимание! Выделение k и ТВ в наборе позволяет оперативно менять их величины при исследовании устойчивости САУ.
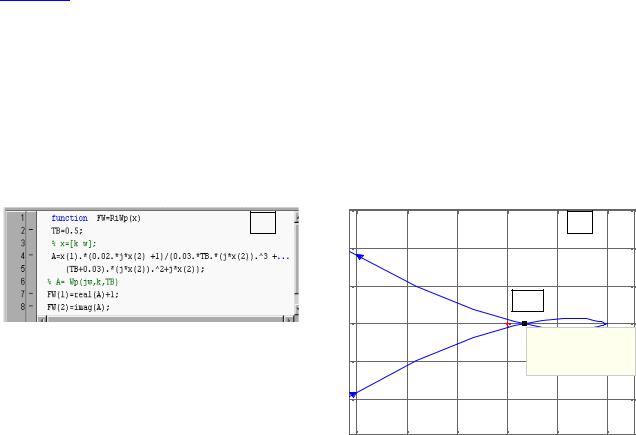
Рис. 2.1. Годограф Найквиста, построенный Матлабом по командам из (2.2).
h - запас по амплитуде (7, 64 дБ = = 20lg(1/ReWp(jω2)), γ - запас по фазе (угол -1,О1,ω1,
равный 6,26 град - угол доворота вектора ω1 до -1; см. нижнее инфотабло на рисунке)
Вставка информационных объектов в рисунок (все кнопки на панели фигуры должны быть отпущены).
•Точки ω1, ω2, О1 - командой контекстного меню (вызывается ПКМ) Characteristics-Stability(All
Cros-sings).
•Верхнее и нижнее инфотабло - щелчком ЛКМ на точках соответственно ω2 и ω1.
•Командная строка Матлаба в заголовке фигуры №1 - выделите требуемую строку в Командном окне и поместите ее в буфер, нажмите на панели фигуры кн.А и поместите курсор щелчком ЛКМ в правый верхний угол заголовка, командой Вставить контекстного меню вставьте строку из буфера.
•Wp в заголовке - скопируйте правую часть передаточной функции из Командного окна в файл «TLabD-Sessia2-Фамилия» и вставьте слева от нее знаки: Wp =; скопируйте полученное выражение в буфер и вставьте его в заголовок, аналогично предыдущему объекту.
•Остальные объекты (h, обозначения ω1, ω2, О1 и др.) - вставляются в Уорд-файле, куда копируется активизированная фигура №1 с использованием команды Alt+Print Screen (помещает фигуру в буфер).
Инфотабло в точках ω1, ω2 свидетельствует, что САУ с Wp (2.1) и параметрами (2.2) устойчива (Yes): см.
последнюю строчку в инфотабло.
2.2. Построение границы области устойчивости k(TB) с использованием решателя fsolve(…)
и оператора nyquist(Wp).
Функция k(TB) является зависимостью критических значений k от значений TB, т.у. k является решением системы уравнений (одновременно с частотой w):
- 12 - |
|
|
|
|
|
|
real(Wp(jw,TB))+1 =0, |
|
|
|
|
|
(2.3) |
imag(Wp(jw,TB)) = 0, |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Wp - ПФ разомкнутой системы типа (2.1). |
|
|
|
|
|
|
Решение системы (2.3) для заданного значения ТВ производится в два этапа. На первом посредством операто- |
||||||
ра nyquist(Wp) добиваются такого значения k, при котором годограф Найквиста пересекает вещественную ось |
||||||
достаточно близко от точки (-1, j0). На втором этапе параметры точки пересечения (k и w) используются в ре- |
||||||
шателе fsolve(…) для точного определения kkp и wkp . |
|
|
|
|
|
|
Этапы построения границы k(TB). |
|
|
|
|
||
1. По вашей ПФ Wp составьте М-файл ImjaWp(x) системы уравнений (2.3), подобный рис. 2.2А, |
|
|||||
сохраните его в вашей папке и обеспечьте к нему доступ Матлаба через процедуру «файл - Set Path…». |
||||||
Параметру ТВ в М-файле присвойте значение 1-й выбранной точки вашего диапазона ТВ. |
|
|
||||
А |
0.6 |
|
|
|
Б |
|
|
|
|
|
|
||
|
0.4 |
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
wk |
|
Рис.2.2. М-файл системы уравнений (2.2) для Wp (2.1) |
0 |
|
|
|
|
|
|
|
|
|
System: W p |
|
|
(А) и подбор точки х0 (к=100,w = 15,3) по диаграмме |
|
|
|
|
Real: -0.824 |
|
-0.2 |
|
|
|
Imag: -0.000953 |
|
|
Найквиста, выводимой командами (2.4), (Б). |
|
|
|
Frequency (rad/sec): 15.3 |
||
|
|
|
|
|||
2. Составьте указание, аналогичное (2.4) с учетом |
-0.4 |
|
|
|
|
|
вашей Wp, для построения годографа Найквиста. Меняя |
|
|
|
|
|
|
к, добейтесь близости справа к точке (-1, i0) точки пере- |
|
|
|
|
|
|
сечения с вещественной осью ветви годографа с |
-2.5 |
-2 |
-1.5 |
-1 |
-0.5 |
0 |
положительными частотами, аналогичной рис. 2.2Б или большей. |
|
|
|
|
|
|
Указание построения диаграммы Найквиста (с ответом в виде Transfer function и фиг.№1 - рис.2.2Б) : |
||||||
>> k=100;TB=0.5;ch=k*[0.02 1];zn=[0.03*TB TB+0.03 1 0];Wp=tf(ch,zn),nyquist(Wp) |
(2.4) |
Transfer function: 2 s + 100
------------------------
0.015 s^3 + 0.53 s^2 + s
3. Для ваших k,ТВ и w из п.2 для точки wk введите в Командное окно указание решения системы уравнений (2.3) с использованием вашего М-файла ImjaWp(x) и решателя fsolve(…): см. (2.5).
Указание решения системы уравнений (2.3) для М-файла рис.2.2А с целью определения критической частоты wкр входных колебаний и критического коэффициента усиления kкр (с выдачей решения):
>> k=100;w=15.3;x0=[k w];x = fsolve('RiWp',x0,foptions),RiWp(x) |
(2.5) |
|
x = 120.4545 |
15.0756 |
|
ans = |
|
|
1.0e-006 * [ |
0.2289 0.0076] |
|
Решение: kкр = 120.4545; wкр = 15.0756; real(Wp(jw,TB))+1= 0.2289 10 -6 ; imag(Wp(jw,TB))= 0.0076 10 -6. По-
следние 2 величины являются невязками соответствующих уравнений для найденного решения.
4. Повторение пп. 2 и 3 для дополнительных 4 значений ТВ из заданного диапазона 0.1-10 с: результаты вычислений сведены в табл.2.1.
Таблица 2.1
Зависимость kкр и wкр от ТВ для Wp(jw,TB) = k(0,02jw+1)/(TBjw+1)(0,03jw+1)jw
№ |
ТВ, |
|
|
|
Значения параметров |
|
|
|
п/п |
с |
исходных, по |
|
|
решений с fsolve(…) |
|
|
|
|
|
nyquist(Wp) |
|
|
|
|
|
|
|
|
k |
w,рад/с |
kкр |
wкр, рад/с |
real(Wp(jw,TB))+1 |
imag(Wp(jw,TB)) |
|
1 |
0.5 |
100 |
15.3 |
120.4545 |
15.0756 |
0.2289 10 -6 |
0.0076 10 -6 |
|
2 |
1 |
100 |
10,3 |
109.5745 |
10.3142 |
1.0e-009 *0.9306 |
1.0e-009 |
*0.0056 |
3 |
3 |
100 |
5,8 |
103.0612 |
5.8321 |
1.0e-008 *0.1020 |
1.0e-008 |
*0.0006 |
4 |
5 |
100 |
4,58 |
101.8219 |
4.4992 |
1.0e-007 *0.1308 |
1.0e-007 |
*0.0175 |
5 |
9 |
100 |
3,35 |
101.0067 |
3.3445 |
1.0e-010 *0.1069 |
1.0e-010 |
*0.002 |
5. Построение границы области устойчивости САУ kкр(ТВ) поданным табл.2.1.
•Указание в Командном окне для построения границы:
- 13 - |
|
|
|
1 3 5 9];Kkp=[120.4545 109.5745 103.0612 101.8219 101.0067];TT=0.4:0.1:9.5;... |
(2.6) |
TB=[0.5 |
||
kk=interp1(TB,Kkp,TT,'cubic');plot(TB,Kkp,'oK',TT,kk), grid on, |
|
|
где данные для ТВ и Ккр скопированы из табл.2.1; ТТ - точки оси ТВ для кубической интерполяции границы(диапазон 0,4-9,5 и шаг 0,1); кк - точки интерполяции Ккр, вычисленные интерполятором interp1(последний знак - единица, а не L); оператор plot рисует два графика: взятых из табл.2.1. точек (только сами точки без соединяющих их линий) и интерполяционной кривой -сплошная линия; наложение их дает график границы - см. рис. 2.3А.
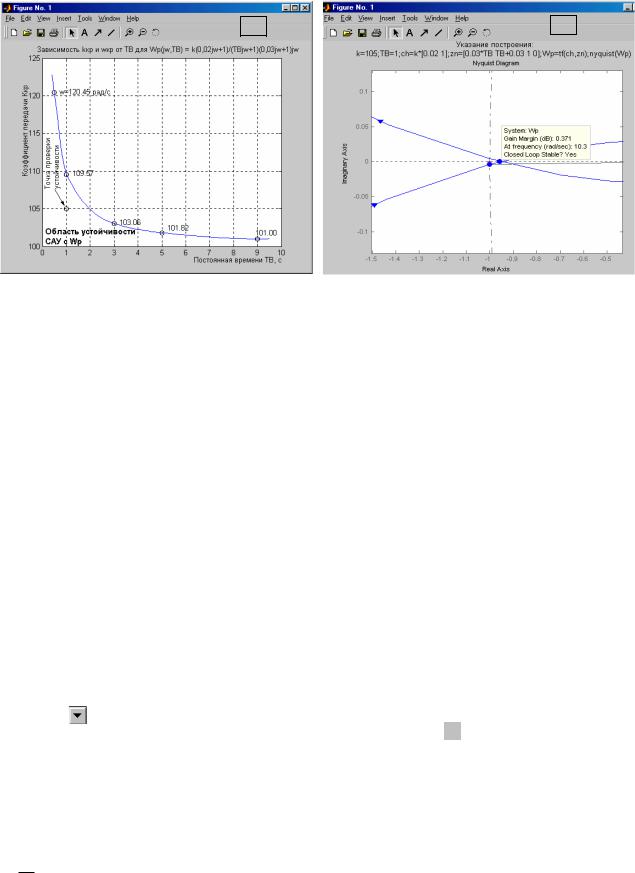
А |
|
Б |
Рис.2.3. Область устойчивости САУ в пространстве параметров К,ТВ для Wp (2.1) (А) и результат поверки устойчивости САУ в ее внутренней точке (Б).
• Возьмите какую-либо точку области вне границы (с целочисленными координатами) и проверьте устойчивость в ней САУ по годографу Найквиста:
− указание для построения годографа в точке К=105,ТВ=1: |
|
>> k=105;TB=1;ch=k*[0.02 1];zn=[0.03*TB TB+0.03 1 0];Wp=tf(ch,zn);nyquist(Wp); |
(2.7) |
−проверьте, чтобы ни одна кнопка на панели фигуры не была нажата, установите в контекстном меню режим просмотра годографа «Zoom on (-1, j0)»; увеличьте в1-2 раза область около (-1, j0) и из контекстного меню (вызывается ПКМ) вызовите команду проверки устойчивости САУ «Characteristics-Stability(All Crossings)».
−щелкните ЛКМ в одной из синих точек и посмотрите последнюю строку инфотабло: Yes - САУус- тойчива, No - неустойчива.
•Сохраните фигуру в вашей папке с именем ImjaUst1.fig.
•Для устойчивой точки вновь постройте границу по следующему указанию (вместе с точкой проверки):
>> TB=[0.5 1 3 5 9];Kkp=[120.4545 109.5745 103.0612 101.8219 101.0067];TT=0.4:0.1:9.5;... |
(2.8) |
kk=interp1(TB,Kkp,TT,'cubic');plot(TB,Kkp,'oK',TT,kk,1,105,'oK'),grid on, |
|
где 1,105,'oK' - координаты и изображение устойчивой точки проверки.
•Сохраните появившуюся фигуру в вашей папке с именем ImjaUst2.fig.
•Вставка на рисунок с границей устойчивости текстовых объектов согласно рис.2.3А.
−Горизонтальные надписи вставляются по одиночке: нажимается кнопка «А», курсор вставляется в место вставки, набирается текст на клавиатуре, вставляются из буфера величины частот (предварительно скопированные в буфер); заголовок рисунка - копируется через буфер заголовок табл.2.1.
−Вертикальные надписи вставляются также, как и горизонтальные. Чтобы повернуть их в вертикальное положение нужно после набора текста: щелкнуть ЛКМ за пределами надписи (надпись выделится маркерами),
командой Edit-Current Object Properties вызовите Редактор Свойств и на его вкладке Style в разделе Rota-
tion кнопкой вызовите меню и нажмите команду 90.0 (надпись повернется на 90 град.).
− Для размещения надписи в нужном месте: нажмите на панели кнопку  , выделите надпись щелчком ЛКМ (появятся маркеры), а затем нажмите ЛКМ на надписи (стрелка указателя мышки изменится на 4-направ- ленную стрелку) и не отрывая ЛКМ передвиньте надпись в нужное место.
, выделите надпись щелчком ЛКМ (появятся маркеры), а затем нажмите ЛКМ на надписи (стрелка указателя мышки изменится на 4-направ- ленную стрелку) и не отрывая ЛКМ передвиньте надпись в нужное место.
2.3.Формирование Симулинк – стенда САУ с заданной Wр(s) и единичной обратной связью
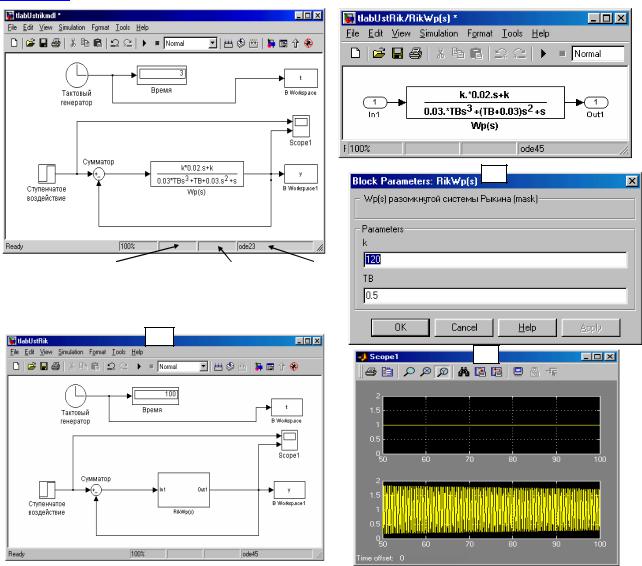
1.Создайте из блоков Симулинка блок – схему рис.2.1А, снабдив ее русскими надписями, указанными на рисунке.
1.1. Кнопкой  на Панели управления окна Матлаба вызовите окно Симулинка, и на нем кнопкой Новая
на Панели управления окна Матлаба вызовите окно Симулинка, и на нем кнопкой Новая  откройте пустое окно новой модели и сохраните ее в вашей папке с именем «TLabUstФамилия(ваша).mdl».
откройте пустое окно новой модели и сохраните ее в вашей папке с именем «TLabUstФамилия(ваша).mdl».
- 14 -
А |
|
В |
Г
Указатель выполне- |
|
Время моделиро- |
|
Алгоритм моде- |
ния моделирования |
|
вания Т |
|
лирования |
Б
Д
Рис.2.4. Виды Симулинк-стенда САУ с Wp(s) (2.1) и некоторых его объектов. А - набор из библиотеки Симулинк-блоков, Б - маскирование блока Wp(s) для удобства
исследования устойчивости САУ, В - окно структуры маскируемой части стенда (вызов: щелчок ПКМ на маске блока - Команда контекст-Меню «Look under mask»), Г - Панель ввода параметров маскированного блока(двойной щелчок ЛКМ на блоке), Д - осциллограмма переходного процесса в САУ
спараметрами из панели рис.2.1Д.
1.2.Заполните поле пустого окна перетаскивая ЛКМ блоки из выделяемых разделов Симулинка (из правого, блокового подокна), расставив их согласно схеме рис.2.4А.
•Тактовый генератор (исходное название clock): (расположение блока) Симулинк – Sources;
•Время моделирования (Display), осциллограф (Scope 1): Симулинк – Sinks;
•Ступенчатое воздействие (Step): Симулинк – Sources;
•Сумматор (Sum): Симулинк – Math;
•Блок Wp(s) - Блок Transfer Fcn: Симулинк – Continuous;
•Блоки В Workspace, В Workspace 1: Симулинк – Sinks.
Блоки «В Workspace» и «В Workspace 1» предназначены для записи в Рабочее пространство (Workspace) времени «t» и выходной величины САУ «у» для последующего построения командой plot(t,y) измерительной осциллограммы ( см. п.? ).
1.3. Соедините блоки согласно схеме рис.2.4А и введите их соответствующие названия (см.рис.2.1А, Б) используя следующие возможности Симулинка:
•Соединительные линии проводятся ЛКМ между входом и выходом соединяемых блоков, отправляясь от любого порта;
•Ответвление от имеющейся линии в заданной точке производится «перетаскиванием» точки ветвления ПКМ в заданную точку поля или к заданному входу выбранного блока (конец ветви оканчивается стрелкой).
•Перемещение линий или блоков схемы производится в два этапа: объект выделяется ЛКМ, а затем, при вторичном нажатии ЛКМ перетаскивается в нужное место. При перемещении связь линии с портами блоков сохраняется.
Для выделения нескольких объектов нужно щелкать ЛКМ при нажатой клавише Shift.
•Поворот блока: Формат – Flip block (поворот на 1800 ) или Rotate block (поворот на 900).
-15 -
•Изменение названия блока: щелчком ЛКМ на названии введите текстовый курсор в название и производите необходимые изменения. Изменение шрифта названия: командой Контекстное меню (щелчок ПКМ на блоке) – Формат – Fonts вызовите панель изменения шрифта и введите в нее требуемые изменения.
• Для отмены ранее выполненных действий используйте кнопку Отмена |
|
на Панели управления окна |
|
Стенда.
•Для получения 2 входов на осциллоскопе: щелчком ЛКМ на нем вызовите осциллограмму, нажатием
кнопки |
на ее панели вызовите панель ввода параметров и в оконце Number of axes установите 2. |
•Введите параметры вашей передаточной функции в блок Wp(s).
Внимание! Имена параметров (k иTB) вводите в английской раскладке: в русской – будет сообщение об ошибке.
1.4.В составе блок – схемы стенда создайте подсистему «Wp(s)» для упрощения ввода изменяемых параметров ТВ и k (вместо 4 раз нужно будет вводить 2 раза с полным исключением возможности нечаянного стирания постоянных символов).
•ЛКМ создайте прямоугольный контур около блока Wp и задайте команду «Edit – Create Subsystem»: Симулинк скроет выделенный блок и вместо создаст блок Subsystem, причем, его название нужно заменить на
ФамилияWp(s) - см. рис.2.1Б.
•Командой «Контекстное меню – Edit Mask» вызовите Редактор Маски.
− Откройте в нем вкладку Parameters, дважды щелкните ЛКМ на кнопке появятся 2 строчки) и введите: в графы Prompt и Variable имена параметров (TB и k). Если строчка введена неправильно, то ее можно удалить: выделив и нажав кнопку Delete. Убедитесь, что в графе Type стоит значение edit, а в графах Evaluate
иTunable стоят галочки (если нет, то вставьте).
−Откройте вкладку Documentation и в оконце Mask type впишите: «Wp(s) разомкнутой системы Фами-
лия (ваша)»
Проверьте правильность введения параметров путем вызова панели ввода значений параметров Подсистемы (двойной щелчок ЛКМ на блоке): панель должна быть аналогичной рис.2.1Г (порядок следования параметров в ней произвольный).
2.4. Модельное снятие границы области устойчивости САУ kкр=f(ТВ)
2.4.1.Подготовка параметров модели.
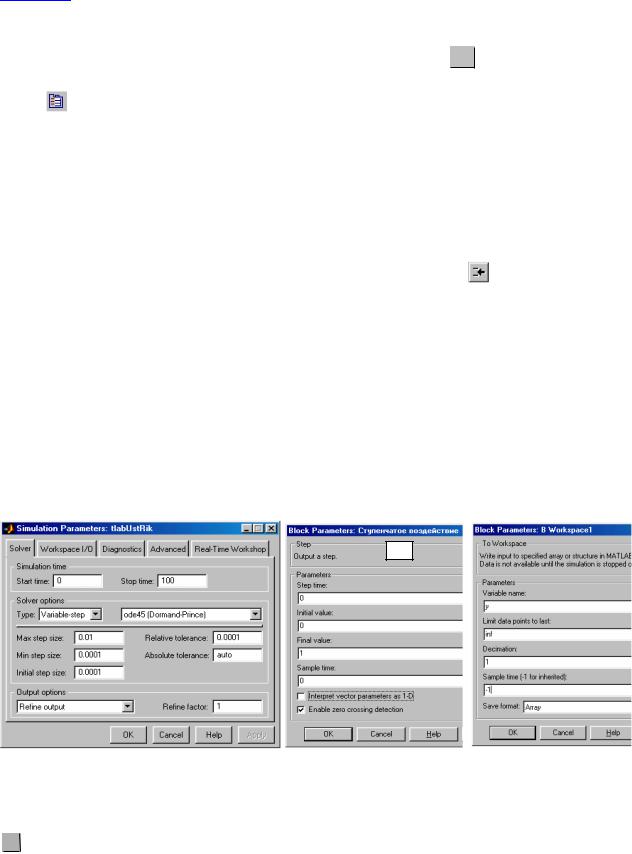
•Из окна стенда САУ командой Simulation - Simulation parameters… вызовите соответствующее окно
иустановите параметры , аналогичные рис.2.5А.
•Установите параметры блока: Ступенчатое воздействие - согласно рис. 2.5Б, В Workspace 1 - согласно рис.2.2В, В Workspace - аналогично рис.2.5В.
А |
|
В |
Б
Рис.2.5. Установка параметров моделирования стенда САУ.
•Вызовите панель ввода параметров устойчивости ( двойным щелчком ЛКМ) и установите параметры k
иTB первой точки границы устойчивости из вашей таблицы типа табл.2.1: величину k округлите до целой устойчивой величины (для примера, k=120 вместо точного 120, 4545). Запустите моделирование нажатием кнопки
 и зафиксируйте на осциллоскопе процесс затухания колебаний, аналогичный рис.2.1Д. Если процесс имеет сильное отличие, то проверьте правильность установки параметров Wp(s) и остальных, указанных в предыдущих пунктах.
и зафиксируйте на осциллоскопе процесс затухания колебаний, аналогичный рис.2.1Д. Если процесс имеет сильное отличие, то проверьте правильность установки параметров Wp(s) и остальных, указанных в предыдущих пунктах.
2.4.2.Снятие параметров точек границы устойчивости k, TB и w.
Для постоянной времени TB берутся точные значения из табл. 2.1. Значения k подбираются с точностью до определенного числа разрядов после запятой (для демонстрируемого примера - до 2 разрядов), причем, это зна-
чение k должно быть устойчивым.
2.4.2.1.Методика определения kкр для заданного ТВ.
•Вызовите панель ввода параметров (двойным щелчком ЛКМ на блоке RikWp(s)) и вставьте це-
лое значение kкр из табл.2.1 (kц) плюс некоторое число в 1-м разряде после запятой - х1, нажмите кнопку «Apply» и запустите процесс моделирования: убедитесь, что колебания затухают. Увеличьте число в пер-
- 16 -
вом разряде на 1 и проверьте: не расходятся ли колебания. Если не расходятся, то добавьте еще 1 к числу разряда. Продолжайте увеличение числа разряда с проверкой затухания колебаний до тех пор, когда при добавлении очередной единицы вместо затухающих колебаний получите постоянные или расходящиеся. В этой зоне изменения k осциллоскоп дает неопределенные показания: вместо него следует использовать графопостроитель, выполняющий после моделирования построение колебаний с большей точностью по данным, записанным в Рабочее пространство (в Workspace). Команды вызова графопостроителя:
>> plot(t,y),grid on, |
(2.9) |
где t и u - данные из Рабпространства (см. рис.2.3).
В качестве значения 1-го разряда берется последнее число, при котором колебания были затухающими, х1му (значение х1 максимальное по устойчивости САУ).
Внимание!
А. При изменении значения k панель ввода параметров не следует убирать (не нажимайте кнопку ОК): для ввода нового значения достаточно нажать кнопку Apply.
Б. Для лучшего различения затухания-расхождения колебаний экран осциллоскопа следует развернуть на полный экран монитора.
• Переходите ко 2-му разряду, при этом, в качестве неизменяемой части значения k установите це-
лое значение k плюс найденное значение 1-го разряда, т.е. (kц,х1му). Повторите для 2-го разряда процедуру поиска значения 1-го разряда и определите х2му. Таким образом, модельное значение kкр равно kц,х1мух2му.
А
Б
В
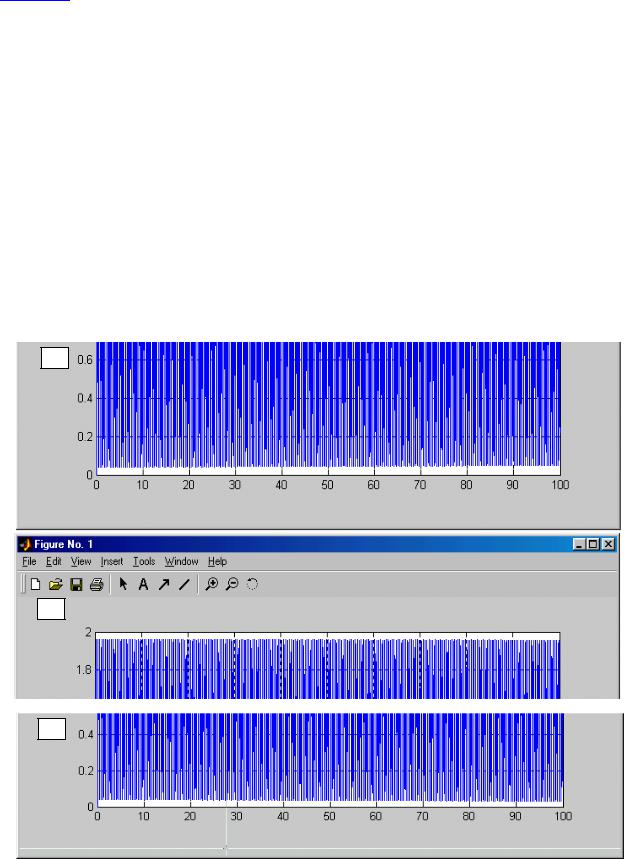
Рис.2.6. Типы колебаний в зоне границы устойчивости САУ с Wp (2.1) при ТВ =0, 5:
А- k=120,44 (затухающие); Б - k=120,45 (постоянные); В - k=120,47 (расходящиеся).
2.4.2.2.Измерение размаха в начале и в конце временного интервала моделирования.
•Запустите процесс моделирования при данном ТВ и найденном kкр = kц,х1мух2му.
•После окончания процесса в Командном окне введите указание:
plot(t,y),grid on,[t,y]=ginput. |
(2.10) |
Матлаб построит график колебаний на Фиг.№1 (типа рис. 2.6) и на плоскость рисунка выведет Измерительное перекрестье, перетаскиваемое мышкой.
-17 -
•Подведите горизонтальную линию перекрестья к верхней кромке колебаний в начале интервала и щелкните ЛКМ. Повторите это и в конце интервала. Далее, щелкните клавишей Enter: в Командном окне появятся временные координаты точек измерения и измеренные значения размахов колебаний. Эти значения копируются в графы 3 и 4 табл.2.2.
2.4.2.3. Измерение частоты колебаний.
•Активизируйте Фиг№1 с колебаниями, щелкните на кнопке  , затем щелкните ЛКМ на графике несколько раз, чтобы на поле осталось 3-5 двойных вертикальных линий.
, затем щелкните ЛКМ на графике несколько раз, чтобы на поле осталось 3-5 двойных вертикальных линий.
•Командой меню Edit-Axes Properties вызовите Редактор свойств осей и выберите вкладку Y. Уберите галочку в оконце Limits: Auto и в оконцах значений установите такие величины, чтобы максимумы и минимумы колебаний размещались в окне Фиг.№1.
•Проведите измерение размаха для двух соседних вершин, аналогично п.2.4.2.2.
•Вычислите частоту колебаний w, введя в Командное окно указание w=2*pi/(t(2)-t(1)) и скопируйте результат в табл.2.2 Уорд-файла.
2.4.2.4.Измерение параметров колебания при kц,х1мух2му+0,01.
Повторите п.2.2. при kкр= kц,х1мух2му+0,01 с копированием результатов в графы 9 и 10.
2.4.2.5. Для определения параметров в точках границы устойчивости при остальных 4 значениях ТВ сле-
дует повторить пп. 2.4.2.1 - 2.4.2.4.
Таблица 2.2 Снятие точек границы устойчивости на стенде рис. 2.1Б
ТВ, |
|
|
kкр |
|
|
|
kкр + 0,01 |
|
||
с |
|
|
|
|
|
|
|
|
|
|
kц,х1мух2му |
t0,t100, |
А0,А100 |
t1,t2, с |
А1,А2 |
w, |
kц,х1мух2му+ |
|
t0,t100, |
А0,А100 |
|
|
|
с |
|
|
|
рад/с |
+0,01 |
|
с |
|
0,5 |
120.44 |
t = |
y = |
t = |
y = |
w = |
120.45 |
|
t = |
y = |
|
|
0.2722 |
1.9650 |
0.6310 |
1.9602 |
14.9710 |
|
|
0.3456 |
1.9620 |
|
|
99.7278 |
1.9509 |
1.0506 |
1.9602 |
|
|
|
99.4240 |
1.9620 |
1 |
109.57 |
t = |
y = |
t = |
y = |
w = |
109.58 |
|
t = |
y = |
|
|
1.1424 |
1.9803 |
0.3117 |
1.9759 |
10.2605 |
|
|
0.2636 |
1.9803 |
|
|
99.0334 |
1.9759 |
0.9240 |
1.9803 |
|
|
|
99.3849 |
1.9846 |
3 |
103.04 |
t = |
y = |
t = |
y = |
w = |
103.05 |
|
t = |
y = |
|
|
2.4194 |
2.0003 |
3.7933 |
1.9859 |
5.8666 |
|
|
2.1889 |
2.0003 |
|
|
98.5023 |
1.9874 |
4.8644 |
2.0045 |
|
|
|
98.5023 |
2.0003 |
5 |
101.6 |
t = |
y = |
t = |
y = |
w = |
101.7 |
|
t = |
y = |
|
|
5.9653 |
1.9990 |
2.0946 |
1.9990 |
4.4562 |
|
|
4.4469 |
1.9990 |
|
|
99.2408 |
1.9874 |
3.5046 |
1.9932 |
|
|
|
98.1562 |
1.9990 |
9 |
100.85 |
t = |
y = |
t = |
y = |
w = |
100.86 |
|
t = |
y = |
|
|
3.1106 |
2.0003 |
2.8298 |
1.9939 |
3.3306 |
|
|
2.4194 |
2.0003 |
|
|
99.1935 |
1.9874 |
4.7163 |
1.9939 |
|
|
|
99.4240 |
2.0003 |
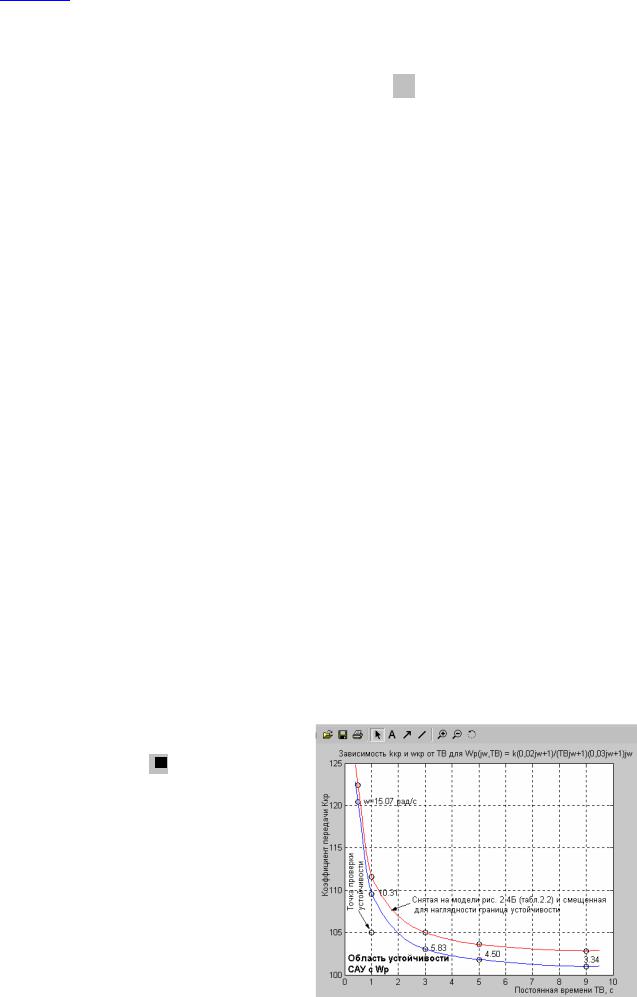
2.5. Построение модельной границы устойчивости на графике расчетной. |
|
|
||||||||
• |
Вызовите файл ImjaUst2.fig. |
|
|
|
|
|
|
|
||
• В Командное окно введите указание: |
|
|
|
|
|
|
||||
«hold on,TB=[0.5 1 3 5 9];Kkp=2+[120.44 109.57 103.04 101.6 100.85];TT=0.4:0.1:9.5;... |
|
(2.11 ) |
||||||||
kk=interp1(TB,Kkp,TT,'cubic');plot(TB,Kkp,'oK',TT,kk,1,105,'oK'),grid on», |
|
|
||||||||
в котором: для Kkp в квадратных скобках записаны значения, полученные на модели, 2 - смещение границы ( на 2), вводимое в том случае, если модельные точки близко расположены к расчетным. После нажатия клавиши Enter Матлаб построит требуемую границу (см. рис.2.7 - сравни с рис.2.3А).
• Измените цвет построенной |
|
кривой. |
|
− Нажмите кнопку |
выделения, |
щелкните ЛКМ на кривой, командой “EditCurrent Object Properties” вызовите Редак-
тор свойств.
− откройте вкладку Style и в оконце Line color установите требуемый цвет.
•Сохраните построенную кривую.
•Добавьте поясняющую надпись к построенной кривой, аналогичную по смыслу рис.2.7.
Рис. 2.7. Границы устойчивости САУ с W(s) (2.1): расчетная (нижняя) и модельная.

-18 -
2.3.Требования к электронному отчету по лабораторной работе 2
Отчет должен состоять из папки с именем «TAULab2-Фамилия (ваша)-D», содержащей следующие файлы:
•М – файл «TAULabD-Sessia2-Фамилия» с программами всех расчетов и построений, разделенных на рубрики, озаглавленные согласно разд.3 задания на Работу 1.
•Уорд – файл «Фамилия-RisLab2-D.doc» с рисунками и таблицей, оформленными подобно соответствующим объектам из Методуказаний.
•Файлы ImjaUst1.fig и ImjaUst2.fig.
•Уорд – файл «Фамилия-Выв-D.doc» с выводами относительно возможного несовпадения расчетных и модельных характеристик, а также объяснений по поводу невыполнения отдельных требований оформительского характера.

- 19 -
Список использованных источников
1.Л.Р. Нейман и К.С. Демирчан. Теоретические основы электротехники. Том 1. М.- Л.: Изд. Энергия, 1966. 524 с.
2.Теория автоматического управления: Методические указания./ Сост.: Л.В. Бабко, В.П. Васильев, В.С. Королев и др. Л.: Изд. ЛПИ, 1989. 40 с.
3.Е.И. Юревич. Теория автоматического управления. Л.: Изд. Энергия, 1975. 416 с.
4.Интернет-страница «About us. The Mathworks». 15.06.01. Интернет-файл: http://www.mathworks.com/company/aboutus.shtml.
5.В.Дьяконов. Матлаб 6.Учебный курс.СПб: изд. Питер, 2001. 592 с.
- 16 -
Приложение1
ВЫЧИСЛЕНИЯ В КОМАНДНОМ ОКНЕ ПАКЕТА МАТЛАБ 6,5
1.1.Рабочее пространство Матлаба 6,5.
Оно включает пять окон Рабочего стола и три других окна (см. табл.1.1).
|
|
Таблица 1.1 |
|
|
|
|
Окно |
Назначение окна |
|
1. Командное (рис.1.1, 1.2) |
Управление всеми процессами в Матлабе. |
|
(Command Window). |
|
|
2. Протокол команд (рис.1.1) |
Запись команд и функций из командного окна и сохранение их для |
стол |
(Command History). |
последующих сеансов, пока пользователь не очистит весь протокол |
|
или его часть. |
|
|
Копирование команд и функций из записи предыдущих сессий в |
|
Рабочий |
|
командное окно для работы. |
(Launch Pad). |
Запуск техдокументации, демонстрационных примеров и обучаю- |
|
|
3. Доступ к техдокументации |
|
|
средств пакета (рис.1.1) |
щей программы выбранного инструментария. |
|
|
|
|
4. Просматриватель дейст- |
Просмотр файлов Матлаба и пользователя, открытие файла, поиск |
|
вующей директории (Current |
содержания. |
|
Directory Browser). |
|
|
5. Просматриватель рабочих |
Просмотр рабочих областей и изменение их содержания. |
|
областей (Workspace Browser). |
|
6. |
Просматриватель техописания |
Просмотр и поиск техдокументации для всего семейства средств |
(рис.1.4) (Help Browser). |
Матлаба. |
|
7. Редактор массивов (Array |
Просмотр содержания массивов в табличном формате и редактиро- |
|
Editor). |
вание величин. |
|
8. Редактор – отладчик (рис.1.3) |
Создание, редактирование и отладка М-файлов (файлов, содержа- |
|
(Editor/Debugger). |
щих функции Матлаба). |
|
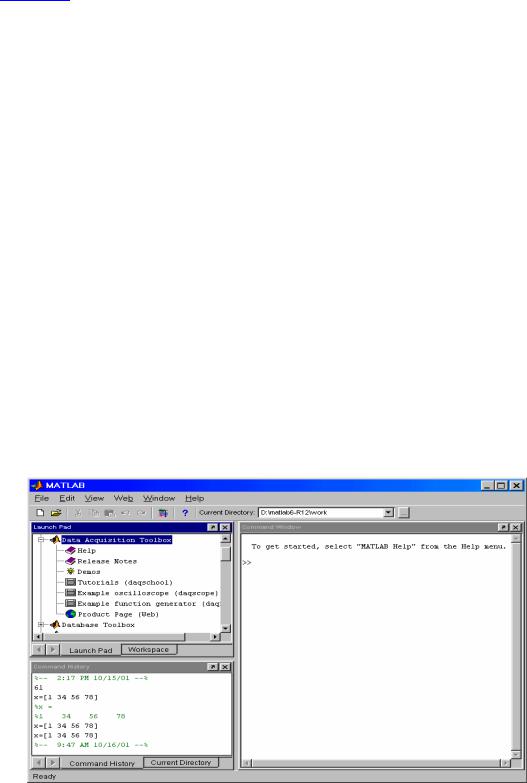
Рис. 1.1. Конфигурация Рабочего стола «по умолчанию», появляющегося при вызове Матлаба.
Рабочий стол имеет 6 конфигураций, выбираемых командой ViewDesktop Layout-Конфигурация. В конфигурации Рабочего стола «по умолчанию» возможно переключение между парами окон (рис.1.1): Launch Pad и Workspace Browser, Command History и Current Directory Browser. На рис.1.1 в окне Launch Pad показаны объекты техдокументации для Инструментария «Прием данных».
1.1.1. Окно справки
Вид окна - на рис.1.2. Важной особенностью окна является возможность создания пользователем подборки выбранных справочных материалов в форточке Избранное и использования их при последующих вызовах Матлаба. Запись избранного материала после его появления в форточке просмотра документации производится нажатием кнопки Запись в Избранное в верхней створке. Справка Матлаба допускает копирование как отдельных терминов, так и статей за одну команду копирования.