

Конспект лекций по ТАУ
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
1 |
|
|
|
e |
уст |
= lim s(g(s)W (s)) = lim s |
|
|
|
|
|
|
|
= |
|||
|
|
|
|
|
|||||||||
|
s→0 |
e |
s→0 |
|
s |
|
1+ |
5K p |
|
||||
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
s |
+1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
40(s +1) |
|
|
|
40 |
|
||||
|
|
|
≈ |
|
|||||||
|
|
|
|
|
|
|
. |
||||
= lim |
|
|
+1 |
|
5K |
|
|||||
s→0 |
s + 5K |
p |
|
p |
+1 |
||||||
|
|
|
|
|
|
|
|
|
|
||
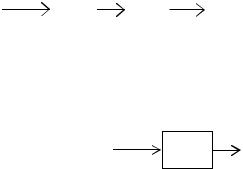
Пример 2.21. Рассмотрим установившуюся ошибку в системе с ПИ-регулятором (рис. 2.16).
Kp
g(t) |
e(t) |
u(t) |
5 |
y(t) |
|
|
|
|
s +1
Ki
s
Рис. 2.16. Пример ПИ-регулятора
Пусть g(t) = 40, тогда
91
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
1 |
|
|
|
|
|
||
e = lim s(g(s)W (s)) = lim s |
|
|
|
|
|
|
|
|
|
|
= |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
уст |
s →0 |
|
|
|
|
e |
|
s →0 |
|
|
|
|
s |
|
|
+ |
5(K p + Ki / s) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s + 1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
1 |
|
|
|
|
|
|
|
|
|
|
40s(s + 1) |
|
|
|
|
||||||
= lim s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
= lim |
|
|
|
|
|
|
|
= 0. |
|||||||
s |
|
|
5(K |
|
s + K |
|
|
|
|
|
s |
|
|
|||||||||||||
s →0 |
|
|
1 |
|
p |
) |
|
s →0 |
s(s + 1) + 5(K |
|
|
+ K ) |
|
|||||||||||||
|
|
|
+ |
|
|
i |
|
|
|
|
|
|
|
|
|
p |
|
|
i |
|
||||||
|
|
|
s(s + 1) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При подаче линейно растущего входного сигнала: g(s) = 40/s2
|
|
|
|
|
40(s + 1) |
|
|
|
40 |
|
|
e |
= lim s(g(s)W (s)) = lim |
|
|
= |
. |
||||||
|
|
|
|||||||||
уст |
s →0 |
e |
s →0 |
s(s + 1)+ 5(K s + K ) |
|
5K |
|
|
|||
|
|
|
|
|
p |
i |
|
|
i |
||
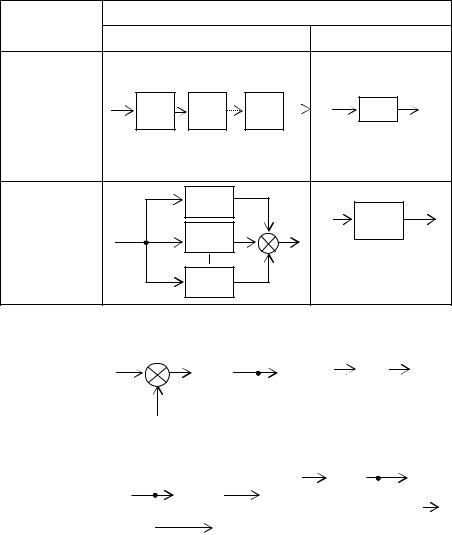
2.8. Преобразование структурных схем
Структурная схема САУ состоит обычно из множества блоков, описываемых с помощью ПФ. Различные способы преобразования структурных схем облегчают определение ПФ сложных САУ и дают возможность привести многоконтурную систему к эквивалентной ей одноконтурной схеме.
Преобразование структурной схемы САУ может быть выполнено на основании правил, основные из которых приведены в табл. 2.3.
92
|
|
|
|
|
Таблица 2.3 |
|
Правила преобразования структурных схем |
||||||
Преобразо- |
|
|
Структурная схема |
|
||
|
|
|
|
|
||
вание |
|
Исходная |
Эквивалентная |
|||
|
|
|||||
Свертыва- |
|
|
|
|
|
|
ние по- |
x |
|
y |
x |
y |
|
следова- |
W |
|||||
W |
W |
|
W |
|||
тельного |
|
|
|
W=W1W2…W n |
||
соедине- |
|
|
|
|||
ния |
|
|
|
|
|
|
Свертыва- |
|
W1 |
|
x |
y |
|
ние па- |
x |
W2 |
y |
|
W |
|
раллель- |
|
|
|
|
||
ного со- |
|
Wn |
|
W=W1+W2+…+ |
||
единения |
|
|
|
Wn |
||
|
|
|
Продолжение табл. 2.3. |
|||
Свертыва- |
x |
|
|
|
|
|
|
|
y |
|
x |
|
|
|
|
|
y |
||||
|
|
|
|
|
|
|
|
W |
|
||||||||||||
ние об- |
|
|
± |
|
W |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
ратной |
|
|
|
|
|
|
|
|
W = |
|
W1 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
связи |
|
|
|
|
|
|
W |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
± W1W2 |
|||||||||||
|
|
|
|
|
|
|
|
|
1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Перенос |
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
y |
|||||
|
x |
|
|
|
|
|
|
y |
W |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
W |
|
|
|
|
|
|
|
|
x |
||||||||
узла через |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|||||
звено впе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ред |
|
|
|
|
|
x |
|
W = |
1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
W |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
93
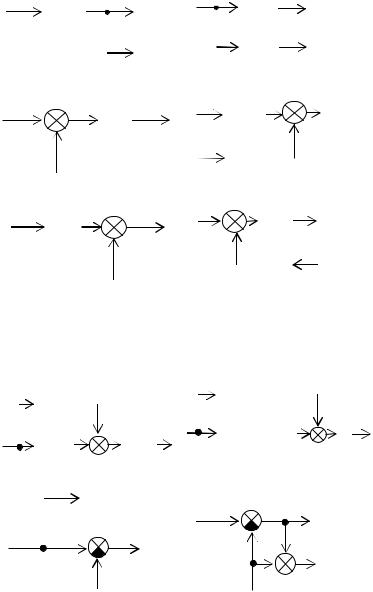
Перенос |
|
x |
|
|
|
|
|
|
y |
|
|
|
|
|
x |
|
|
|
|
y |
|
||||||||
|
|
W |
|
|
|
|
|
|
W |
|
|
|
|
||||||||||||||||
узла через |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
звено на- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
||||||
зад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перенос |
x1 |
|
|
|
|
|
|
|
|
|
y |
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
y |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
||||||||||
сумматора |
|
|
± |
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
через звено |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
± |
|
|
|
|
||||||||
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
вперед |
|
|
x2 |
|
|
|
|
|
W |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
y |
|
|
x1 |
|
|
|
|
|
|
y |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
||||||||||||||
Перенос |
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
± |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
сумматора |
|
|
± |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
||||||||||||
через звено |
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
назад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W = |
1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
W |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Продолжение табл. 2.3. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перенос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
± |
|
|||||||||
прямой связи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|||||||||
через звено |
x |
|
|
|
± |
|
|
|
|
|
y |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
W |
|
|
|
W |
|
||||||||||||||||
|
|
|
|
W |
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
W4=W3W2 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Перенос уз- |
|
|
|
|
x1 |
|
|
|
|
|
x1 |
|
|
|
|
|
y |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
x1 |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ла через |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
||||
сумматор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вперед |
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
94
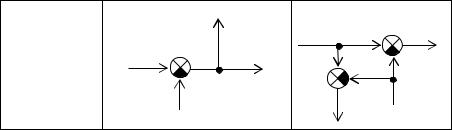
Перенос уз- |
y |
x1 |
y |
|
x1 |
|
|
||
ла через |
|
|
||
сумматор |
|
y |
|
|
назад |
|
x2 |
||
x2 |
y |
|||
|
При выполнении преобразований следует каждое имеющееся в схеме типовое соединение заменить эквивалентным звеном. Затем можно выполнить перенос точек разветвления и сумматоров, чтобы в преобразованной схеме образовались новые типовые соединения звеньев. Эти соединения опять заменяются эквивалентными звеньями, затем вновь может потребоваться перенос точек разветвления и сумматоров и т. д.
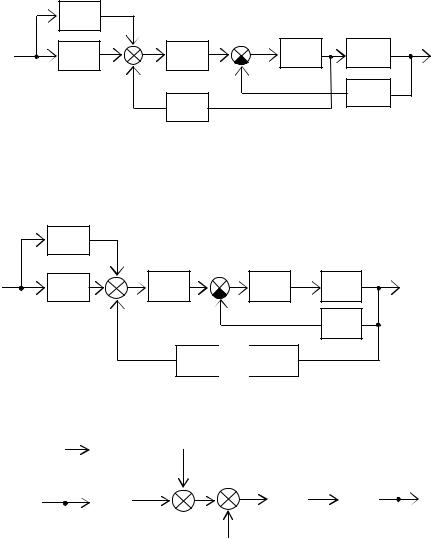
Пример 2.22. Пусть необходимо получить эквивалентное представление для структуры, приведенной на рис. 2.17.
95
W |
|
|
|
x |
|
|
y |
W |
W |
W |
W6 |
|
W |
|
W7 |
|
|
|
|
|
Рис. 2.17. Исходная структура САУ |
|
|
Преобразование включает несколько этапов, показанных на рис. 2.18 – 2.21.
W |
|
|
|
x |
|
|
y |
W |
W |
W |
W |
W
W 
 1/
1/
Рис. 2.18. Перенос узла через блок W6
x |
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
y |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
W |
|
|
|
|
|
|
W |
|
W |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W = |
|
|
W5W6 |
; |
W = |
W4 |
. |
|
|
|
W |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||
9 |
1 |
+W7W6W5 |
8 |
W6 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||||||
Рис. 2.19. Свертывание обратной связи и последовательного соединения
96
x |
|
|
|
y |
W10 |
= |
W3W9 |
|
W1 |
|
W1 |
|
1−W8W3W9 |
||
|
|
|
|
|
|||
|
|
|
|
|
W11 |
= W1 + W2 |
|
Рис. 2.20. Свертывание обратной связи и параллельного соединения
Wэк
Wэкв = W10W11 |
= |
W1W3W5W6 + W2W3W5W6 |
||||
|
1 |
+ W5W6W7 |
− W3W4W5 |
|||
|
|
|||||
Рис. 2.21. Свертывание последовательного соединения
Таким образом, первый способ преобразования структурных схем заключается в непосредственном использовании правил, приведенных в табл. 2.3. Неудобство использования этого подхода заключается в том, что порядок применения формул здесь достаточно произволен, возможны ошибочные шаги, усложняющие поиск решения.
2.9. Сигнальные графы и формула Мейсона
Второй способ для получения ПФ многоконтурной системы заключается в использовании модели системы в виде сигнального графа.
Сигнальный граф позволяет графически описать линейные связи между переменными, он состоит из узлов (вершин) и соединяющих их направленных ветвей.
97
Ветвь соответствует блоку структурной схемы, она отражает зависимость входной и выходной переменных. Сумма всех сигналов, входящих в узел, образует соответствующую этому узлу переменную.
Последовательность ветвей между двумя узлами называется
путем.
Контуром называется замкнутый путь, который начинается и заканчивается в одном и том же узле, причем ни один узел не встречается на этом пути дважды. Коэффициент передачи контура – это произведение всех входящих в него дуг.
Контуры называются некасающимися, если они не имеют общих узлов.
Сигнальный граф однозначно соответствует структурной схеме.
Пусть X(s) и Y(s) – входная и выходная переменные системы. Тогда для вычисления ПФ системы управления по ее графу можно воспользоваться формулой Мейсона:
|
X (s) |
|
1 |
N |
|
W (s) = |
= |
∑ Pi (s) i (s), |
|||
|
|
||||
|
Y (s) |
i=1 |
|||
где Pi(s) – передаточная функция i-го отдельного прямого пути от X(s) до Y(s), вычисленная как произведение передаточных
функций дуг, входящих в этот путь; |
(s) – определитель графа. |
|
(s) = 1 − ∑ L j (s) + ∑ L j (s)Lk (s) − ∑ L j (s)Lk (s)Lm (s) + ..., |
||
j |
j,k |
j ,k ,m |
где Lj(s) – ПФ j-го замкнутого контура, равная произведению ПФ дуг, входящих в этот контур; Lj(s)Lk(s) – произведение ПФ пары (j-го и k-го) замкнутых контуров, не касающихся ни дугами, ни вершинами, суммирование осуществляется по всем парам не касающихся контуров; Lj(s)Lk(s)Lm(s) – произведение тройки (j-го, k-го и m-го) не касающихся контуров, суммирование производится по всем тройкам не касающихся контуров.
98
i(s) – дополнительный множитель для i-го пути равен определителю графа, в котором приравнены нулю коэффициенты передачи контуров, касающихся этого пути.
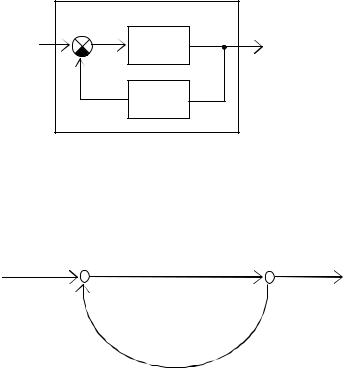
Пример 2.23. Получить ПФ системы с обратной связью (рис. 2.22).
X(s) |
E(s) |
Y(s) |
|
|
W1(s) |
|
W3(s) |
W2(s) |
|
|
|
Рис. 2.22. Система с обратной связью |
||
Соответствующий сигнальный граф показан на рис. 2.23.
X(s) |
W1(s) |
Y(s) |
–W 2(s)
Рис. 2.23. Граф системы с обратной связью
От входа к выходу ведет один путь
P= W (s).
11
Вграфе есть один контур
L1= –W 1W2.
99
Таким образом:
(s) = 1 − ∑Wj (s) = 1 + W1W2 .
j
Дополнительный множитель пути равен 1, следовательно:
|
(s) = |
|
W1 |
(s) |
|
W3 |
|
|
|
. |
|
|
|
|
|||
|
1 |
+ W1 (s)W2 (s) |
|||
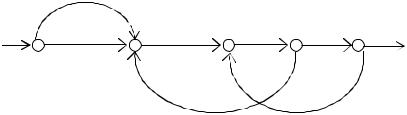
Пример 2.24. Рассмотрим получение ПФ многоконтурной системы с использованием формулы Мейсона для структуры рис. 2.17, которой соответствует граф, показанный на рис. 2.24.
|
W2 |
|
|
|
|
X(s) |
W1 |
W3 |
W5 |
W6 |
Y(s) |
|
|
W4 |
|
– W7 |
|
Рис. 2.24. Описание системы управления сигнальным графом
От входа к выходу ведут два пути:
P1=W1W3W5W6, |
P2= W2W3W5W6. |
В графе есть два контура: |
|
L1= W3W5W4, |
L2= –W 5W6W7. |
Контур L1 касается контура L2 , поэтому определитель графа вычисляется по формуле
= 1 − (L1 + L2 ) .
100