

5. Потенциальное силовое поле и потенциальная энергия
Силовым нолем называется часть пространства, в каждой точке которого на материальные точки действуют силы, зависящие от координат и времени, т. е.
![]() .
.
Стационарное силовое поле — поле, в котором силы не зависят от времени.
Потенциальное силовое поле — стационарное поле, в котором работа силы не зависит от формы траектории перемещения точки ее приложения. Такие силы называются потенциальными или консервативными. Это сила тяжести, сила упругости.
Потенциальная энергия П точки или механической системы — это энергия покоя, которая представляет собой работу, совершаемую потенциальными силами при перемещении материальной точки или механической системы из заданного положения в некоторое нулевое положение (в нулевой уровень) — положение, в котором потенциальная энергия равна нулю.
Консервативная система — это механическая система, в которой действуют только потенциальные силы.
Проекции силы на оси декартовых координат в потенциальном силовом поле
![]() .
.
Элементарная работа силы в потенциальном силовом поле
![]() ,
,
т. е. равна со знаком (-) полному дифференциалу от потенциальной энергии.
Работа силы на некотором перемещении в потенциальном силовом поле
 ,
,
где
![]() — работа по перемещению из положения
— работа по перемещению из положения![]() в положение
в положение![]() ,
,![]() и
и![]() — потенциальная энергия соответственно
в этих положениях.
— потенциальная энергия соответственно
в этих положениях.
Задача
3. Груз
массы т
= 10 кг
находится на высоте
![]() = 1м
от стола. Высота стела
= 1м
от стола. Высота стела
![]() =
0,5м.
Определить потенциальную энергию
груза, по отношению к столу и по
отношению к полу, принимая их за нулевой
уровень.
=
0,5м.
Определить потенциальную энергию
груза, по отношению к столу и по
отношению к полу, принимая их за нулевой
уровень.

Решение. По отношению к столу
![]() .
.
По отношению к полу
![]() .
.
Задача
4..
На середину упругой балки жесткости с
= 39,2 Н/см,
закрепленной по концам, положили груз
массы 100 кг,
под действием которого балка прогнулась
на величину
![]() = 25см.
Определить потенциальную энергию
консервативной системы.
= 25см.
Определить потенциальную энергию
консервативной системы.
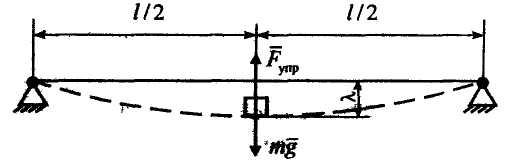
Решение. Примем за нулевой уровень ось балки до деформации
![]() .
.
Закон сохранения механической энергии материальной точки и
механическом системы. Если на материальную точку или механическую систему действуют только консервативные силы, то в любом положении точки или системы сумма кинетической и потенциальной энергий остается величиной постоянной.
Доказательство:
Для материальной точки на основании теоремы об изменении кинетической энергии
![]() .
.
С другой стороны,
![]() .
.
Тогда
![]() .
.
Для механической системы аналогично
![]() a
a
![]() ,
,
тогда
![]() ,
,
где Т+ П — полная механическая энергия системы.
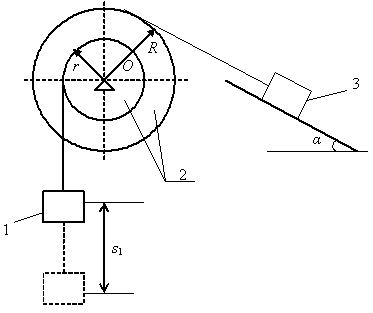
Задача 5. Механическая система под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения тела 3, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость и ускорение тела 1 в тот момент, когда пройденный им путь станет равным s (рис. 3.70). В задаче принять:
![]()
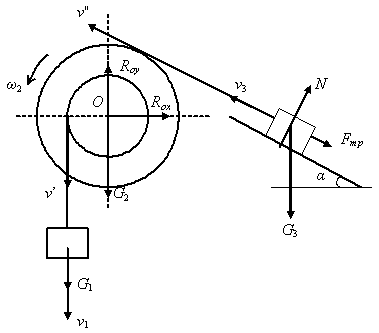
Решение.
На механическую систему действуют
активные силы
![]() ,
,![]() ,
,![]() .
Применяя принцип освобождения от связей
системы, покажем реакции шарнирно-неподвижной
опоры 2 и шероховатой наклонной
поверхности. Направления скоростей тел
системы изобразим с учетом того, что
тело 1 спускается.
.
Применяя принцип освобождения от связей
системы, покажем реакции шарнирно-неподвижной
опоры 2 и шероховатой наклонной
поверхности. Направления скоростей тел
системы изобразим с учетом того, что
тело 1 спускается.
Задачу решим, применяя теорему об изменении кинетической энергии механической системы:
![]() ,
,
где Т
и
![]() – кинетическая энергия системы в
начальном и конечном положениях;
– кинетическая энергия системы в
начальном и конечном положениях;![]() -
алгебраическая сумма работ внешних
сил, приложенных к системе, на перемещении
системы из начального положения в
конечное;
-
алгебраическая сумма работ внешних
сил, приложенных к системе, на перемещении
системы из начального положения в
конечное;![]() -
сумма работ внутренних сил системы на
том же перемещении.
-
сумма работ внутренних сил системы на
том же перемещении.
Для рассматриваемой системы, состоящей из абсолютно твердых тел, соединенных нерастяжимыми нитями,
![]() .
.
Так как в начальном
положении система покоилась, то
![]() .
Следовательно,
.
Следовательно,
![]() .
.
а)
б)
Кинетическая энергия системы представляет собой сумму кинетических энергий тел 1, 2, 3
![]() .
.
Кинетическая энергия груза 1, движущегося поступательно, равна:
![]() .
.
Кинетическая энергия блока 2, совершающего вращение вокруг оси Оz, перпендикулярной плоскости чертежа,
![]() .
.
Кинетическая энергия тела 3 в его поступательном движении
![]() .
.
Таким образом,
![]() .
.
Выражение
кинетической энергии содержит неизвестные
скорости всех тел системы. Начать
определение необходимо с
![]() .
Избавимся от лишних неизвестных, составив
уравнения связей.
.
Избавимся от лишних неизвестных, составив
уравнения связей.
Уравнения связей это не что иное, как кинематические соотношения между скоростями и перемещениями точек системы. При составлении уравнений связей выразим все неизвестные скорости и перемещения тел системы через скорость и перемещение груза 1.
Скорость любой
точки обода малого радиуса
![]() равна скорости тела 1, а также произведению
угловой скорости тела 2 и радиуса вращенияr
равна скорости тела 1, а также произведению
угловой скорости тела 2 и радиуса вращенияr
![]() .
.
Отсюда выразим угловую скорость тела 2
![]() .
(а)
.
(а)
Вращательная
скорость любой точки обода блока большого
радиуса
![]() ,
с одной стороны, равна произведению
угловой скорости блока и радиуса
вращения, а с другой – скорости тела 3
,
с одной стороны, равна произведению
угловой скорости блока и радиуса
вращения, а с другой – скорости тела 3
![]() .
.
Подставив значение угловой скорости, получим:
![]() .
(б)
.
(б)
Проинтегрировав при начальных условиях выражения (а) и (б), запишем соотношение перемещений точек системы:
![]() .
(в)
.
(в)
Зная основные зависимости скоростей точек системы, вернемся к выражению кинетической энергии и подставим в него уравнения (а) и (б):
 .
.
Момент инерции тела 2 равен:
![]() .
.
Подставляя значения масс тел и момента инерции тела 2, запишем
![]() .
.
Определение суммы работ всех внешних сил системы на заданном перемещении.
![]() .
.
Работа силы тяжести тела 1
![]() .
.
Работа сил
![]() равна нулю, так как эти силы приложены
к неподвижной точке.
равна нулю, так как эти силы приложены
к неподвижной точке.
![]() .
.
Работа силы тяжести тела 3
![]() .
.
Работа нормальной реакции тела 3 равна нулю, так как сила перпендикулярна направлению движения
![]() .
.
Работа силы трения скольжения
![]() ,
,
так как
![]() ,
,
тогда
![]() .
.
Сумма работ внешних сил
![]() .
.
Подставляя значения масс тел, соотношения перемещений (в) и числовые параметры, запишем:

Теперь согласно
теореме об изменении кинетической
энергии механической системы приравняем
значения Т
и
![]()
![]() .
(г)
.
(г)
Скорость тела 1 получим из выражения (г)
![]() .
.
Ускорение тела 1 можно определить, продифференцировав по времени равенство (г):
![]() ,
,
где
![]() .
.
Тогда
![]() .
.
Задача 6. Каток для раскатывания асфальта (рис. 62) состоит из кузова массой т1 = 3∙103 кг и двух одинаковых барабанов. Масса барабана m2 = 103 кг, радиус его r = 0,5 м, а радиус инерции — ρ = 0,4 м. Коэффициент трения качения барабанов fк = 9 см. Определить величину вращающего момента М, передаваемого от двигателя на ведущий барабан катка, необходимую для придания кузову ускорения а = 0,2 м/с2.

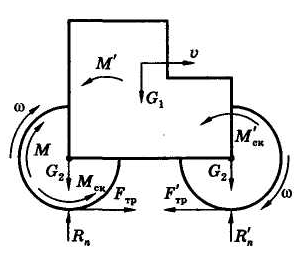
Рис. 62 Рис. 63
Решение. Поскольку рассматривается мгновенное состояние системы, то следует применить теорему об изменении кинетической энергии в дифференциальной форме
![]() .
.
Кинетическая энергия системы (поступательно движущийся кузов и совершающие плоское движение барабаны) имеет вид
![]() ,
,
где v — скорость кузова, vС — скорость центра масс барабана, ω — его угловая скорость, JzC = m2ρ2 = 160 кгм2 — момент инерции барабана относительно его оси (проходящей через центр масс).
Кинематические связи определяются тем, что каждый барабан поворачивается вокруг своего мгновенного центра скоростей (точки Р), а именно: vC = ωr; кроме того, v = vC, т. е. ω = v/r. Тогда кинетическая энергия приводится к виду
![]() ,
,
где
![]() = 6280кг
— приведенная к кузову масса системы.
Производная от кинетической энергии
по времени равна
= 6280кг
— приведенная к кузову масса системы.
Производная от кинетической энергии
по времени равна
![]()
Рассмотрим действующие в системе силы (рис. 63).
Внешние силы.
Силы тяжести барабанов G2
и кузова G1
будут иметь нулевую мощность, поскольку
они перпендикулярны скоростям точек
их приложения. Также нулевую мощность
будут иметь нормальные реакции Rn
и
![]() и силы тренияFтр
и
и силы тренияFтр
и
![]() ,
так как равны нулю скорости их точек
приложения — мгновенных центров
скоростей.
,
так как равны нулю скорости их точек
приложения — мгновенных центров
скоростей.
Сопротивление
качению учтем, используя вторую модель,
т. е. не смещая нормальные реакции, а
вводя моменты сопротивления качению:
![]() и
и![]() .
.
Суммарная мощность внешних сил — мощность этих моментов
![]() .
.
Из условия отсутствия движения центра масс системы вдоль вертикали следует равенство нулю суммы проекций всех сил на вертикальную ось, откуда легко получаем Rn + R'n = G1 + 2G2. Тогда
![]() .
.
Внутренние силы. Учтем, что за счет работы двигателя на ведущий барабан и на кузов будут действовать одинаковые по модулю, но противоположно направленные вращающие моменты М и М' (закон равенства действия и противодействия). Заметим, что хотя эти моменты относятся к числу внутренних сил, в данном случае они должны учитываться, поскольку система не является неизменяемой (имеется взаимное проскальзывание тел системы: кузова и барабанов).
Запишем, учитывая, что кузов не вращается, суммарную мощность внутренних сил (моментов)
![]() .
.
Тогда сумма мощностей всех сил запишется в виде
![]() .
.
Множитель, стоящий в этой формуле перед скоростью, — это приведенная сила системы
![]() .
.
Итак,
![]() .
.
Собирая правую и левую части теоремы, получаем тпрav = Fnpv, откуда найдем необходимую приведенную силу Fup = mnpa = 1256 Н.
Из выражения для приведенной силы найдем необходимую величину вращающего момента М: М = Fnpr + + fк(G1 + 2G2) = 5,04 кНм.
Анализируя численные величины слагаемых в последней формуле, можно отметить, что на преодоление сопротивления качению в данном случае требуется значительно больший вращающий момент, чем на разгон катка, т. е. придание ему ускоренного движения.
Ответ: М = 5,04 кНм.
Задача 7. Для рассмотренного в предыдущей задаче катка определить скорость его кузова после того, как он прошел расстояние s = 2 м, если к ведущему барабану приложен постоянный вращающий момент М = 4,6 кНм, а начальная скорость катка была равна v0 = 0,2 м/с.
Решение. В постановке дайной задачи идет речь о конечном перемещении системы, поэтому следует применить теорему об изменении кинетической энергии в интегральной форме:
![]() .
.
Кинетическая энергия системы получена в предыдущей задаче
![]() ,
,
где тпр= 6280 кг — приведенная к кузову масса системы. Начальная кинетическая энергия системы
![]() Дж.
Дж.
Вычислим теперь величину работы действующих сил (рис. 63).
Внешние силы.
Силы тяжести барабанов G2
и кузова G1
работы не совершают, поскольку они
перпендикулярны скоростям (и,
соответственно, перемещениям) точек их
приложения. Также не работают нормальные
реакции Rn
и R’n
и силы трения Frp
и
![]() ,
так как всегда равны нулю скорости их
точек приложения — мгновенных центров
скоростей, и, соответственно, постоянно
равны нулю их мощности.
,
так как всегда равны нулю скорости их
точек приложения — мгновенных центров
скоростей, и, соответственно, постоянно
равны нулю их мощности.
Работу будут совершать моменты сопротивления качению:
![]() и
и
![]() ,
,
а именно:
![]() ,
,
где
![]() .
.
Здесь φ — угол поворота барабанов, для которого, интегрируя уравнение кинематической связи ω = v/r с учетом нулевых начальных условий для перемещений s и φ, легко получаем φ = s/r. Тогда
![]() .
.
Внутренние силы. Запишем, учитывая, что кузов не вращается, суммарную работу внутренних сил (моментов) М и М’:
![]() .
.
Тогда сумма работ всех сил запишется в виде
![]() .
.
Множитель, стоящий в этой формуле перед перемещением s, — это приведенная сила системы
![]()
Итак
![]() Дж.
Дж.
Собирая правую и левую части теоремы, получаем
![]()
или Т – 125,6 = 760, откуда
![]() и
и
![]()
Базовые вопросы
1.Работа силы тяжести и силы упругости.
2.Работа вращающего момента.
3.Теорема об изменении кинетической энергии точки.
4.Теорема об изменении кинетической энергии механической системы.
5.Что называется потенциальной энергией?