

2.7.4. Конструктив
Расположение контроллера – компенсатора в силовом электрошкафу накладывает определённые требования к его корпусу.
Корпус устройства изготовлен из оцинкованной жести. Раскрой листа приведён на рисунке ... Для подключения контроллера – компенсатора к магнитным пускателям и электрической сети используется 24 – х контактный клеммник.
Внутри корпуса на 6-ти шпильках одна над другой крепятся две платы – плата контроллера и плата тиристорного управления. Сбоку от этих плат размещён блок питания. Верхняя крышка контроллера на период настройки может быть снята. Тогда становится доступным разъём , панель с микросхемой ПЗУ и светодиодные индикаторы.
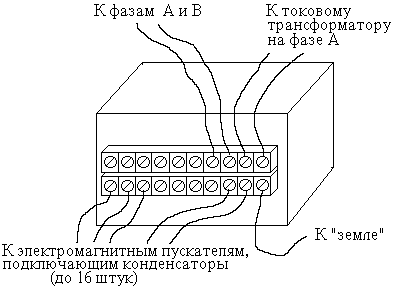
Рисунок 2.7.4.1. Внешний вид контроллера-компенсатора
На рисунке 2.7.4.2. изображено крепление плат устройства, на рисунке 2.7.4.3. развёртка корпуса для изготовления из жести.

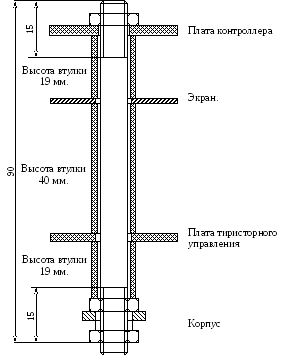
Рисунок
2.7.4.2.
Схема крепления плат устройства.
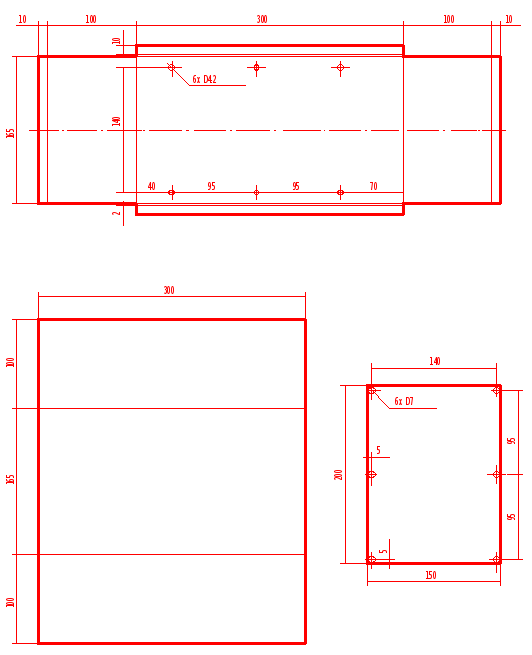
Рисунок
2.7.4.3.
Развёртка корпуса и экран платы
тиристорного управления.
3. Организационно – экономический раздел
4. Раздел безопасности и экологичности Заключение
В настоящем дипломном проекте решена задача разработки микропроцессорного контроллера.
Контроллер предназначен для автоматической компенсации реактивной мощности нагрузок потребителей в сетях общего назначения напряжением 380 вольт частотой 50 Гц при работе в составе конденсаторной установки из 2 - 16 конденсаторов КМ-Ш-0.38 (или другого типа) по 27 - 50 кВАр каждый.
В общесистемном разделе дипломного проекта рассмотрены аспекты компенсации реактивной мощности промышленных электросетей. Проведён анализ известных устройств автоматической компенсации реактивной составляющей мощности. Показано, что они не способны обеспечить необходимого качества управления компенсацией. Поставлена задача разработки микропроцессорного контроллера – компенсатора реактивной мощности. Определены основные положения проектирования управляющих МП систем. В качестве основного средства проектирования устройства выбрана система автоматического проектирования PCAD.
В специальном разделе приводится техническое задание на разработку контроллера – компенсатора. Определены функции устройства и его структура. Выбрана и обоснована элементная база устройства. Основные критерии, по которым производился выбор – высокая надёжность и помехозащищённость.
Контроллер представляет собой микропроцессорную систему управления на базе микропроцессора Intel 8085A. Внутренняя частота синхронизации системы 2.5 МГц позволяет с высокой точностью отслеживать синусоиды тока и напряжения, вычислять их величины и угол сдвига ФИ. Измерительная часть схемы контроллера не содержит аналоговых элементов , что делает ее надежной и помехозащищенной, сводит настройку измерительных цепей к минимуму.
Устройство состоит из платы контроллера, платы тиристорного управления и блока питания, имеет внешний интерфейс для связи с компьютером IBM.
В разделе так же разработаны алгоритмы контроля и управления процессом компенсации. Программное обеспечение контроллера функционирует в реальном масштабе времени и состоит из основной программы, подпрограмм обработки прерываний TRAP, RST 7.5 и комплекса подпрограмм BIOS.
Для отладки аппаратных и программных средств контроллера разработан специальный лабораторный стенд и сервисное программное обеспечение. Приводится технология разработки программного обеспечения с использованием кросс – средств на IBM – совместимом компьютере. Описываются конструктивные особенности устройства.
В организационно- экономическом разделе проекта приводится экономическое обоснование целесообразности использования контроллера – компенсатора на промышленных предприятиях.
Раздел безопасности и экологичности посвящён рассмотрению условий труда и разработке мер по их улучшению.
Разработанный микропроцессорный контроллер – компенсатор реактивной мощности может найти применение на промышленных предприятиях.