

2.4. Аппаратные средства контроллера
Контроллер – компенсатор реактивной мощности включает в себя следующие компоненты (рисунок 2.4.1.):
-плата контроллера;
-плата тиристорного управления;
-блок питания.
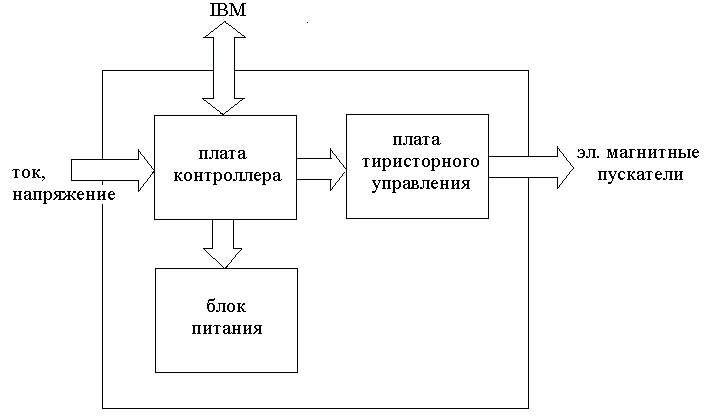
Рисунок 2.4.1. Структурная схема контроллера-компенсатора.
2.4.1. Плата контроллера
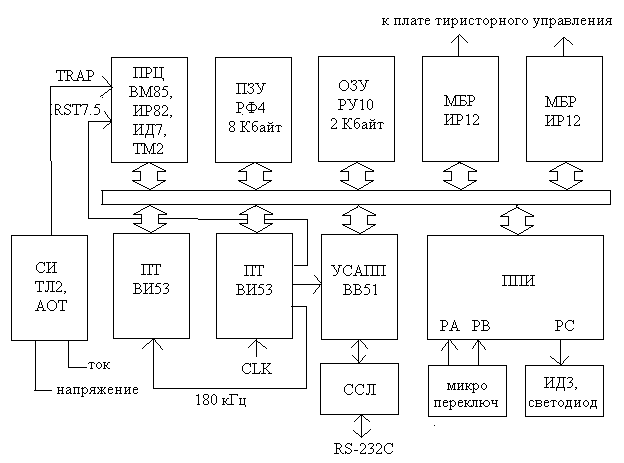
Плата контроллера содержит следующие узлы (рис. 2.4.1.1.):
процессор на основе микропроцессора (МП) М1821ВМ85А (микросхемы D1, D2, D4, D6.2);
постоянное запоминающее устройство (ПЗУ) К573РФ6 (D9);
оперативное запоминающее устройство (ОЗУ) КР573РУ10 (D10);
два буферных регистра (МБР) КР589ИР12 (D14, D15);
параллельный интерфейс (ППИ) КР580ВВ55А (D11);
программируемый таймер (ПТ) прерываний и синхронизации КР580ВИ53 (D13);
последовательный интерфейс (УСАПП) КР580ВВ51А (D17);
схема связи с линией (ССЛ) RS-232C (D18, D19);
схема измерения (СИ) тока и напряжения (T1, D5, D7, D6.1, D12)
схема индикации и микропереключатели (D16, Q1, Q2);
Рисунок
2.4.1.1. Структурная схема платы контроллера.
Рисунок
2.4.1.2. Электрическая принципиальная
схема контроллера – компенсатора.
Рисунок
2.4.1.3. Электрическая принципиальная
схема контроллера – компенсатора.
Рисунок
2.4.1.4. Схема расположения элементов на
плате контроллера.
Принцип измерения величин тока, напряжения и угла между ними.
В контроллере-компенсаторе заложен оригинальный принцип измерения тока, напряжения сети и угла между ними.
Измерительная схема контроллера построена на триггерах Шмитта. Триггер Шмитта серии микросхем ТТЛ имеет порог срабатывания 1.7 В при входном сигнале до 5 В. При "пропускании" синусоиды напряжения через триггер получаются импульсы, ширина которых будет зависеть от амплитуды синусоиды. Чем больше амплитуда, тем шире импульсы и наоборот. Длина импульсов в контроллере измеряется с помощью программируемого таймера КР580ВИ53 на входы CLK которого с генератора постоянно подается частота 180 Кгц.
И Рисунок
2.4.1.3. Принцип измерения величин тока
и напряжения.

Чтобы измерить угол ФИ между током и напряжением в измерительной схеме используется третий счетчик таймера КР580ВИ53. Он фиксирует разность во времени между приходом импульсов тока и напряжения.
Адреса и назначение программируемых БИС контроллера представлены в таблицах 2.4.1.1 – 2.4.1.7.
Таблица 2.4.1.1.
Последовательный интерфейс К580ВВ51 (RS-232)
|
4000H |
SARTD |
регистр данных |
|
4001H |
SARTC |
регистр состояния и управления |
Таблица 2.4.1.2.
Таймер1 К580ВИ53
|
4800H |
ST1Z0 |
счетчик А импульса напряжения U |
|
4801H |
ST1Z1 |
счетчик В импульса тока I |
|
4802H |
ST1Z2 |
счетчик С импульса первой ступени |
|
4803H |
RUST1 |
регистр управляющего слова |
Таблица 2.4.1.3.
Таймер2 К580ВИ53
|
5000H |
ST2Z0 |
запрос прерывания TRAP процессора |
|
5001H |
ST2Z1 |
синхронизация счетчиков A, B, C 180кГц |
|
5002H |
ST2Z2 |
синхронизация RS-232C 9.6 КГц |
|
5003H |
RUST2 |
регистр управляющего слова |
Таблица 2.4.1.4.
Параллельный интерфейс К580ВВ55
|
5800H |
PRTA |
порт A |
|
|
|
PA3-PA0 коэффициент для расчета дискретности управления |
|
|
|
PA7-PA4 коэффициент для расчета задания ФИ |
|
5801H |
PRTB |
порт B |
|
|
|
PB3-PB0 коэффициент для расчета нечувствительности |
|
|
|
PB4 режим отладки |
|
|
|
PB5 порядок включения коммутаторов |
|
|
|
PB6 передача видеобуфера |
|
|
|
PB7 знак задания ФИ |
Продолжение табл. 2.4.1.4.
|
5802H |
PRTC |
порт C |
|
|
|
PC3-PC0 на дешифратор индикаторов |
|
|
|
PC4 разрешение дешифратора |
|
5803H |
RUSP |
регистр управляющего слова |
Таблица 2.4.1.5.
Буферные регистры К589ИР12
|
6000H |
MBR1 |
младшие разряды |
|
67FFH |
MBRD |
слово целиком |
|
6800H |
MBR2 |
старшие разряды |
Таблица 2.4.1.6.
Прерывания контроллера
|
Источник запроса прерывания |
вход МП |
начальный адрес подпрограммы |
|
Начальный сброс |
RESET |
0000 H |
|
Логика D8.1 |
TRAP |
0024 H |
|
ПТ D13 счетчик 0 |
RST 7.5 |
003C H |
Таблица 2.4.1.7.
Выходные порты контроллера
|
Обозначение |
Микросхема |
Разряд |
разъем |
куда |
|
D14 |
К589ИР12 |
Q0 |
ХР3: 1 |
|
|
|
|
Q1 |
ХР3: 2 |
на плату |
|
МБР1 |
|
Q2 |
ХР3: 3 |
тиристорного |
|
|
|
Q3 |
ХР3: 4 |
управления |
|
|
|
Q4 |
ХР3: 5 |
|
|
|
|
Q5 |
ХР3: 6 |
(младшие |
|
|
|
Q6 |
ХР3: 7 |
разряды) |
|
|
|
Q7 |
ХР3: 8 |
|
|
D13 |
К589ИР12 |
Q0 |
ХР2: 9 |
|
|
|
|
Q1 |
ХР2: 10 |
на плату |
|
МБР2 |
|
Q2 |
ХР2: 11 |
тиристорного |
|
|
|
Q3 |
ХР2: 12 |
управления |
|
|
|
Q4 |
ХР2: 13 |
|
|
|
|
Q5 |
ХР2: 14 |
(старшие |
|
|
|
Q6 |
ХР2: 15 |
разряды) |
|
|
|
Q7 |
ХР2: 16 |
|