

Результаты испытания разработанного технологического процесса начальной калибровки инерционного сенсора
В результате проведения технологического процесса начальной калибровки инерционного сенсора были получены следующие результаты:
Для акселерометра Ax:
k0=2032
k1=1013
Для акселерометра Ay:
k0=2051
k1=1017
Для акселерометра Az:
k0=2046
k1=1006
Величины углов (в градусах):
x, y, z для акселерометра Ax: ( 1,162 89,819 88,852);
x, y, z для акселерометра Ay: (88,644 2,060 88,450);
x, y, z для акселерометра Az: (89,883 90,010 0,117);
Для магнитного датчика Мx:
l0=2292;
l1=607;
Для магнитного датчика Мy:
l0=1903;
l1=609;
Для магнитного датчика Мz:
l0=2167;
l1=592;
Величины углов (в градусах):
x, y, z для магнитного сенсора Мx: (92,795 77,057 166,748);
x, y, z для магнитного сенсора Мy: (93,335 78,381 167,899);
x, y, z для магнитного сенсора Мz: (92,044 78,948 168,948);
Полученные калибровочные коэффициенты опробовались при работе с инерционными приложениями, что позволило убедиться в правильности выполненной разработки и проведения технологического процесса начальной калибровки инерционного сенсора.
Разработанный технологический процесс калибровки отличается новизной, отсутствием лишних и дублирующихся операций, возможностью проведения автоматизированного расчета калибровочных коэффициентов
Разработка алгоритмов управления инерциальными приложениями
Разработка алгоритма опроса модуля инерционного сенсора и фильтрации полученных показаний
Для снятия значений с модуля инерционного сенсора необходимо послать ему сигнал о подготовке данных, а потом ожидать от него показаний сенсоров. Однако случаются моменты, когда связь с модулем инерционного сенсора потеряна или он вышел из строя. Для корректной обработки подобных ситуаций, предотвращения зависания КПК и уведомления пользователя о неполадках, необходимо установить лимит времени, в течении которого ожидаются данные от модуля инерционного сенсора, и если лимит времени превышен то следует прекратить ожидание данных и установить флаг ошибки модуля инерционного сенсора.
Снятые с модуля инерционного сенсора данные должны подвергаться обработке с целью фильтрации шумов от внешних раздражителей, таких как дрожание руки. Из-за дрожания руки, удерживающей модуль инерционного сенсора, и неровных её движений, осциллограммы показаний модуля инерционного сенсора будут содержать в себе паразитные пульсации, которые могут быть неправильно обработаны инерционным приложением, или будут вызывать неприятное «дёрганье» изображения на экране КПК. Фильтрация позволяет устранить паразитные пульсации показаний инерционного сенсора, что крайне важно при управлении программным обеспечением КПК с помощью наклонов модуля инерционного сенсора. Оптимальным по скорости и качеству фильтрации будет использовать алгоритм скользящего среднего, причём глубина фильтрации будет определяться величиной скользящего окна. Фильтрацию необходимо проводить с помощью усреднения показаний модуля инерционного сенсора по каждой из его осей для акселерометров и магнитных сенсоров. Глубина фильтрации будет определяться количеством точек осциллограммы снятых показаний.
По результатам проведённого анализ проблемы опроса модуля инерционного сенсора и фильтрации его показаний был разработан алгоритм опроса модуля инерционного сенсора и фильтрации полученных показаний. Схема этого алгоритма изображена на Рис. 4 .23.
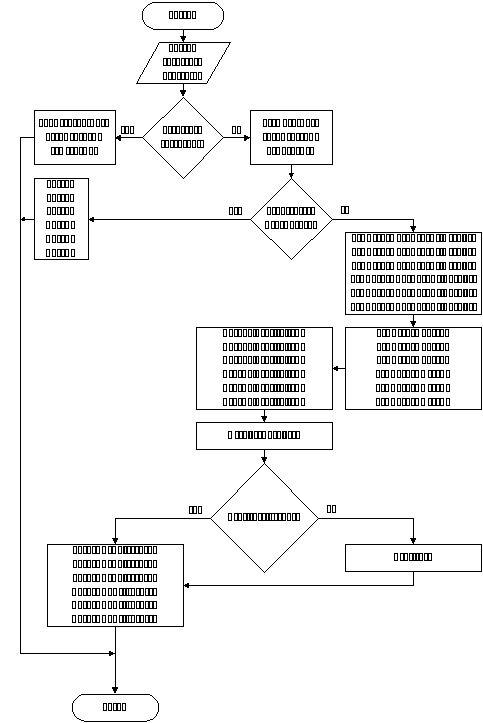
Рис. 4.23 Схема алгоритма опроса модуля инерционного сенсора и фильтрации полученных показаний