

5. Подбор наиболее оптимального режима для поставленной задачи
Будем отталкиваться от поставленной задачи и начальных условий. Подача воздуха в управляющую систему осуществляется посредством 2-х быстродействующих дискретных распределителей. Фактически, так как управление осуществляется с помощью дискретных распределителей, то регулировать мощность выходных элементов не представляется возможным. Остается регулировать время открытия и время закрытия дискретных распределителей.
5.1 Применение п-регулятора в работе
Работа основана на дискретных распределителях, поэтому управлять плавно регулировать мощность исполнительных элементов не получится.
Так как у нас подача воздуха в систему осуществляется с помощью дискретных распределителей, то регулирование будет осуществляться при мощности либо 100%, либо 0% . Отталкиваясь от этого, изменение длительности импульса будет прямо пропорционально рассогласованию. Разность между уставкой и текущим положением будет преобразована и записана в таймер, в процессе работы которого будет включен необходимый распределитель. Соответственно чем больше разность, тем дольше по времени будет включен распределитель. В момент времени, когда ИО( каретка) попадает в нужную точку или же в необходимую зону, будет произведено выключение распределителей. Опишем процесс работы алгоритма в контроллере.
Загружается конечная координата в переменную SP (уставка), находящуюся по адресу MW30. ИДП считывает начальное положение каретки PV(present value) –, находящаяся по адресу IW30. Берется разность и, в зависимости от значения, выполняются включение распределителей в заданном алгоритме. В отличие от режима двухпозиционного регулятора, тут зона нечувствительности отсутствует или крайне мала, поэтому ей можно пренебречь.
При подходе к уставке, на определенном удалении, контроллер, подчиняюсь заданному условию, он начинает выдавать одиночные импульсы, разной длительности по закону: чем меньше осталось до точки назначения, тем меньше длительность импульса, что защищает систему от перерегулирования.
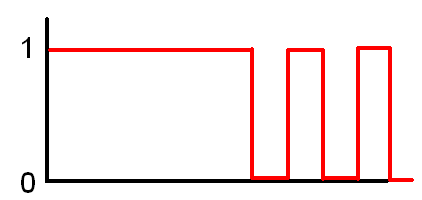
Рис 5.1 Циклограмма П-регулятора, воспроизведенного в работе
Используется таймер типа «задержка по включению». В первом таймере задается длительность импульса, в течение которого будет активно выходное устройство – один из распределителей, в зависимости начальных условий. Дальше происходит сравнение между уставкой и текущим измерением, если они не совпадают, то происходит перезапуск таймера. Если же выполняется условие : уставка = текущее положение, то распределители переходят в исходное состояние, перекрывая тем самым доступ сжатого воздуха в систему. При воздействии внешних возмущений, которые выведут систему из состояния покоя, произойдет перезапуск таймера, и цикл будет повторяться, пока заданное условие не будет выполнено.
5.2 Применение пд-регулятора в работе
Дифференциальная составляющая оценивает скорость изменения отклонения системы. Она еще называется дифференцированием разности. Если скорость изменения отклонения увеличивается быстро, управляющее воздействие будет большим. В данном случае будет увеличено время открытия соответствующего распределителя. Величина управляющего воздействия должна присутствовать только тогда, когда имеет место быть отклонение во времени.
Запишем значение дифференциальной составляющей регулирующего воздействия в дискретный момент времени N:
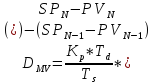 (5.2.1)
(5.2.1)
Кр – коэффициент усиления
SPN - заданное значение в дискретный момент времени N
PVN – значение переменной процесса в данный момент времени
SPN-1 – заданное значение в момент времени N-1
PVN-1 – значение переменной процесса в момент времени N-1
TS – интервал сбора данных в контуре регулирования. То есть это период времени, в течении которого регулятор вычисляет новое значение регулирующего воздействия
TD – постоянная времени диф. звена
Дифференциальная
составляющая DMV
пропорциональна изменению ошибки
регулирования. Чтобы при изменениях
заданного значения избежать скачков в
регулирующем воздействии из-за влияния
производной, в уравнении принимается,
что заданное значение является константой
 .
Поэтому вычисляется изменение переменной
процесса, а не ошибки регулирования.
Для вычисления следующего значения
дифференциальной составляющей должно
запоминаться фактическое значение, а
не ошибка регулирования.
.
Поэтому вычисляется изменение переменной
процесса, а не ошибки регулирования.
Для вычисления следующего значения
дифференциальной составляющей должно
запоминаться фактическое значение, а
не ошибка регулирования.
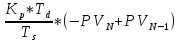
Если принять во внимание, что заданное значение остается постоянным на протяжении всего времени регулирования, то получается, что:
 (5.2.2)
(5.2.2)
- значение дифференциальной составляющей регулирующего воздействия в дискретный момент времени N.
Отсюда ПД-закон управления получается:
PD
= Kp( +
+ (5.2.3)
(5.2.3)