

2.3 Техніко-економічне обгрунтування
По кривих на рис. 2.3 [2] (с. 12) визначаємо, що для швидкості пересування візка V = 0.68 м / с і точності зупинки v = 20 мм потрібно забезпечити діапазон регулювання D = 1:10.
Даному діапазону і встановленої потужності електродвигуна задовольняють наступні системи управління [2] (табл. 15.2, с. 254):
- ТП-ДПТ: система тиристорний перетворювач - електродвигун постійного струму;
- КІ-АДФ: силовий контролер з імпульсно-ключовим регулюванням швидкості - асинхронний двигун з фазним ротором;
- ПЧІ - АД: система перетворювач частоти інверторного типу - асинхронний двигун з короткозамкнутим ротором;
З точки зору питомої вартості (для потужності 2 ... 5кВт) усі системи займають рівні положення, але порівнюючи масогабаритні показники і ступінь складності виконання системи, перевагу отримує система КІ - АДФ.
Вибір виду електроприводу підтверджується на основі аналізу економічних і масогабаритних показників. Проаналізуємо дві системи управління: КІ-АДФ і ТП-Д за методикою, викладеною в [1] (т. 1, п.II.1., С. 231). Економічна оцінка здійснюється за формулою:
А= ,
(2.52)
,
(2.52)
Де А – показник затрат, руб.;
P=2,7кВт – номінальна потужність електродвигна;
Sk=![]() – число включень за рік роботи [1]
(табл.II.1.3.);
– число включень за рік роботи [1]
(табл.II.1.3.);
SДОП=![]() – для КИ-АДФ иSДОП=
– для КИ-АДФ иSДОП=![]() – для ТП-Д – износостійкість електроприводу
[1] (табл.II.1.2.);
– для ТП-Д – износостійкість електроприводу
[1] (табл.II.1.2.);
T=150 годин – на рік[1] (табл.II.1.3.);
NВК=120 – число включеннь за годину [1] (табл.II.1.3.);
=2,5 – коефіцієнт, характеризуючий зведенні моменты інерції механізмів.
=1 для КИ – АДФ и =0,4 для ТП-Д – коефіцієнт, визначаючий втрати при пуску, гальмуванні і регулюванні швидкості.
СДВ - питома вартість 1 кВт потужності електродвигуна, руб. / КВт [1] ;
СДВ КИ-АДФ=50 руб./кВт; СДВ ТП-Д=120 руб./кВт;
СУ – питома вартість управляючого пристрою на 1кВт потужності двигуна, руб./кВт. [1] ;
СУ КИ-АДФ=10 руб./кВт и СУ ТП-Д=250 руб./кВт.
АКИ-АДФ= =162+108+16=286
руб.
=162+108+16=286
руб.
АТП-Д=
 =999+10+6,4=1015,4
руб.
=999+10+6,4=1015,4
руб.
Так як економічні показники цих двох систем значно різняться один від одного, то масогабаритні показники можна не порівнювати.
Витрати на систему КІ-АДФ менше, тому їй і віддаємо перевагу.
2.4 Розрахунок параметрів двигуна
Критичне ковзання:
 ,
(2.53)
,
(2.53)
Де
 -номінальне
ковзання.
-номінальне
ковзання.
![]() -
синхронна частота обертання;
-
синхронна частота обертання;
![]()
![]() -
номінальна частота обертання;
-
номінальна частота обертання;

Тоді:
![]()
MH-номінальний момент двигуна;
MH=![]() (2.54)
(2.54)
MH
![]()
Таким чином:
![]()
Відношення опорів:
a= (2.55)
(2.55)
a
= 0.264
0.264
Опір статору:
 (2.56)
(2.56)
![]()
Питомий опір статору:
 .
.
Индуктивний опір короткого замикання:
 (2.57)
(2.57)
![]()
Перевірка двигуна по пусковому моменту:
Для того щоб двигун розігнався, необхідне виконання наступної умови:
Mп![]()
Mп= (2.58)
(2.58)
Mп=
49,5>(1,5…2)*18,9 – умова виконується.
2.5 Вибір схеми керування
 Рисунок
2.8
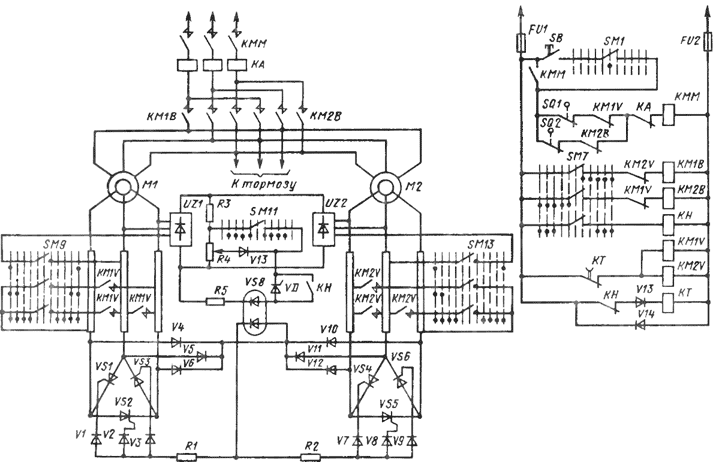
– Схема
двох двигунового електроприводу
механізму пересування з імпульсно-ключовим
регулюванням.
Рисунок
2.8
– Схема
двох двигунового електроприводу
механізму пересування з імпульсно-ключовим
регулюванням.
На рис. 2.8 наведена схема двухдвигунового електроприводу з керуванням від силового кулачкового контролера ККТ62, вживаєма для кранів режимів ЗК. У цій схемі імпульсно-ключове управління використано для отримання доводочних швидкостей механізмів при діапазоні регулювання 10:1. Механічні характеристики електроприводу показані на рис. 2.9. За винятком режиму малих швидкостей, робота схеми аналогічна управлінню від кулачкового контролера, широко відомого в кранобудуванні.
Контакти кулачкового контролеру SM виводять ступені резисторів в ланцюзі ротора, а реверс двигуна здійснюється контакторами реверсу КМ1В і КМ2В. Імпульсно-ключові комутатори обох двигунів виконані по трикутним схемам на тиристорах VS1-VS6. До складу вузла керування комутатором входять вимірювальні мости ЕРС двигунів UZ1, UZ2, елемент з регульованим порогом спрацьовування, виконаний на стабілітроні VD, формувач імпульсів, виконаний на оптроні VS8, розподільники імпульсів на діодах V1-V3 і V7 - V9 і резисторах R1 і R2, випрямляють діоди V4-V6 і V10-V12, дільник напруги на резисторі R3 і потенціометрі R4. Через зустрічне включення випрямлячів на діодах V4-V6 і V10-V12 сигнал керування надходить на тиристори комутатора того двигуна, ковзання якого вище, а зустрічне включення мостів UZ1 і UZ2 забезпечує і керування комутатором по ковзанню того ж двигуна. Завдяки цьому в певній мірі досягається вирівнювання частот обертання і навантажень двигуна.
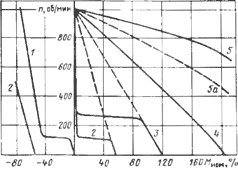
Рисунок 2.9 – Механічні характеристики електроприводу
Система рівнянь для електроприводу з лінеаризовані механічною характеристикою буде виглядати наступним чином:
![]() , (2.59)
, (2.59)
Де – жорсткість электроприводу;
![]() ;
;
g – проводимість машини;
с2 – постійна машини;
 ;
(2.60)
;
(2.60)
![]()
![]()
![]() –
электромагнітна постійна;
–
электромагнітна постійна;
 (2.61)
(2.61)
![]()
![]()
Регулятор провідності ротора пропорційно - інтегральний (ПІ), тобто:
При налаштуванні контуру швидкості на симетричний оптимум, маємо:
Для обмеження моменту і підтримки постійним прискорення необхідний задатчик інтенсивності.
|
|
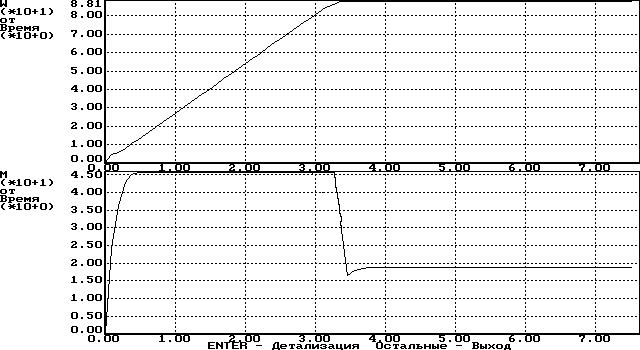
Рисунок 2.10 – Пуск электроприводу на номінальну швидкість (=88 рад/с)
|
|
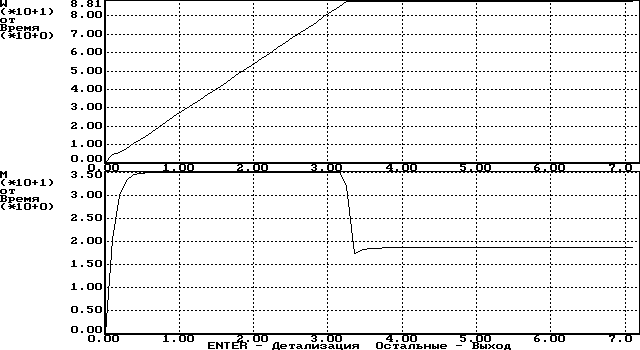
Рисунок 2.11 – Пуск электроприводу на номінальну швидкість (=88 рад/с) при зниженому моменті інерції.
|
|
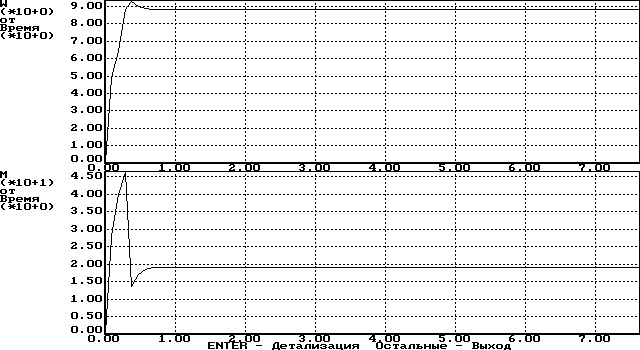
Рисунок 2.12 – Пуск электроприводу на мінімальну швидкість (min=0.1*nom= 8.8 рад/с)
|
|
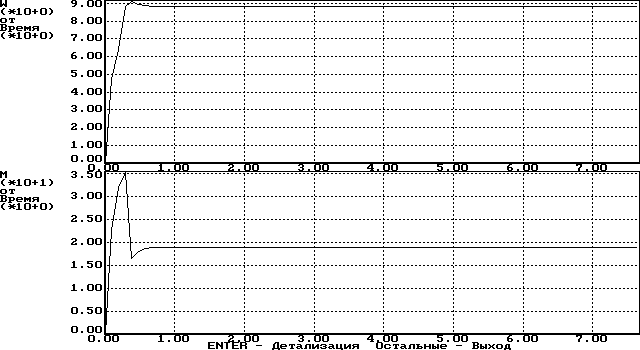
Рисунок 2.13 – Пуск електроприводу на мінімальну швидкість при зниженому моменті інерції.
При пуску двигуна на мінімальну швидкість, час пуску tп істотно менше, ніж на номінальну швидкість. Через це пусковий момент не встигає вийти на устанавит значення і відразу ж змінюється до значення Mст1.
І при максимальному і при мінімальному завданнях двигун розвиває необхідну швидкість (88 рад/с и 8.8 рад/с).
На графіках для дослідів зі зниженими моментами інерції видно, що пусковий момент знижується (М'п1 <МП1). Отже, знижується і споживана з мережі енергія, пропорційна моменту і кутової швидкості. Знизити моменти інерції механізму можна, зменшивши масу візка або діаметр ходового колеса. Але для цього треба впроваджувати нові матеріали, що забезпечують ті ж конструкційні характеристики при меншій масі й діаметр У цьому курсовому проек розглянуті груповий електропривод, тобто від одного електродвигуна управління здійснюється двома виконавчими органами (колеса візка). Структурна схема системи управління складена для індивідуального однодвігательний приводу, так як діаметри валів, передавальних врашеніе колесам, не перевищують 8000 мм і вважаємо муфти на них жорсткими.