

aaaГОСЫ / Лекции Кузнецов часть 1
.pdf1
1 Введение
Эволюция развития микропроцессорной техники
Первый |
микропроцессор |
был изготовлен фирмой |
Intel в 1971 г. - |
Intel 4004 |
||
(Fclk = 0,75 МГц). До этого |
момента функции микропроцессора |
реализовывались |
с помощью |
|||
набора |
ИС |
средней и |
малой |
степени интеграции (счетчики, регистры, |
сумматоры, |
|
комбинационная ложка и т.д.). Первый микропроцессор был 4-х разрядным, реализован по n- МОП технологии, содержал 2,3 тыс. транзисторов, выполнял 80 000 операций в секунду и 45 команд. Это был однокристальный центральный процессор, имеющий в своем составе четырехразрядный параллельный сумматор, 15 четырехразрядных регистров и стек.
Современный микропроцессор Alpha содержит 15,2 миллионов транзисторов (по данным 1999-2000 г.). Тактовая частота составляет 800 МГц, выполняет 5,2 миллиарда операций в секунду.
1673 г. – первое вычислительное устройство. Оно называлось Арифмометр. К. Лейбниц 1943 г. – вычислительная машина «Марк 1» на электромагнитном реле.
1945 г. – вычислительная машина на радиолампах.
1948 г. – изобретение транзистора..
1953 г. – Кирхе соединил несколько транзисторов на одной подложке 1958 г. – получены первые микросборки Нойсом и Кирхе.
Основные понятия
Микропроцессор (МП) – это микросхема или совокупность небольшого числа микросхем (один или несколько кристаллов БИС), выполняющая над данными арифметические и логические
операции и осуществляющая программное управление вычислительным процессом. Микропроцессорная система (МПС) – специализированная информационная или
управляющая система, построенная на основе микропроцессорных средств. Микропроцессорный комплект (МПК) – набор различных ИМС различной степени
интеграции, объединенных по конструктивно-технологическому признаку и предназначенных для
совместного использования при построении МП, микроЭВМ, контроллеров и др. Конструктивно-технологический признак – одна конструкция и технология изготовления.
Один и тот же вид корпуса (один или разные) для объединения их в один.
3 вида МП:
1)универсальный
2)специализированный – для создания конкретной микроЭВМ (например, Электроника 60)
3)секционный – позволяют получать гибкую систему команд и позволяют набирать из секции любые разряды ЭВМ. Секции входят в различные комплекты.
ИМС делятся по степени интеграции (k)
k = ] lg N [
N – число активных элементов на подложке.
МИС (1÷10) – ИС малой степени интеграции (например, элементы И, ИЛИ, НЕ)
СИС (10÷100) – средней степени интеграции (счетчики, регистры, буферное устройство) БИС (100÷1000) – большие ИС (микроконтроллеры)
СБИС (> 1000) – сверхбольшие ИС (большие ОЗУ)
В МПК нет смешения технологий и конструктивно-технологический признаков.
2
Структурная схема трех-магистральной микроЭВМ
МП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шина Адреса |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
АЛУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шина |
Данных |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шина управления |
||||
|
УУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЧтЗап. |
|
|
|
|
|
|
ЧтЗап. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КПДП |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
ОЗУ |
|
ПЗУ |
|
|
|
|
|
П.Ввод |
|
П.Выв. |
|
|
||||||||
Устройство |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Устр.памяти |
|
|
|
|
|
|
Устр. ввода/выв. |
|
||||||||||||||||
сопряжени |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
я |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к ВУ |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
АЛУ – арифметическое логическое устройство (реализует вычислительные действия) УУ – устройство управления
Устройство сопряжения (синхронизации). Включает в себя тактовый генератор, который выводятся из МП, т.к. чем больше частота, тем больше выделяется тепла. Применяется для уменьшения влияния генераторов.
УВВ – устройство ввода – вывода. Обмен информацией между внешним устройством и ЭВМ.
П.Ввод – порт ввода
П.Вывод – порт вывода
Шина адреса – для адресации шин памяти (однонаправленная)
Шина данных – основная шина данных (двунаправленная) Шина управления (может быть двунаправленной)
ПЗУ – постоянное запоминающее устройство. При выключении питания информация не теряется.
ВУ – внешнее устройство – подсоединяется к шинам МП не непосредственно, а через ППА. КПДП – контроллер прямого доступа к памяти – проставляет шину адреса и данных.
Ведущее устройство в режиме DMA.
Система шин МПС: Для МП характерна трехшинная структура, содержащая шину адреса, двунаправленную шину данных и шину управления.
Основные характеристики:
−тип микроэлектронной технологии
−количество кристаллов, образующих МП, размеры кристалла, количество элементов (транзисторов) на кристалле, количество выводов корпуса кристалла
−длина (количество разрядов) слова
−быстродействие МП (тактовая частота, время выполнения команд основных операций)
−емкость адресуемой памяти
−тип управляющего устройства (схемное или микропрограммное управление)
−эффективность системы команд (количество команд, выполняемые операции, возможные способы адресации, наличие команд работы со стековой памятью, команд операций с битами, десятичными числами и т.п.)
−число уровней прерывания
−возможность прямого доступа к памяти
−пропускная способность интерфейса ввода-вывода
3
−количество и уровни питающих напряжений
−номинальные параметры используемых сигналов
−мощность
2 типа корпусов по конструкции:
1)Dip – контакты расположены так, что необходимо сверлить корпус.
2)Планарный – выводы соединены с контактными площадками и сверления не требуется.
В состав базового комплекта входят следующие основные БИС:
ИК 80А – центральный процессор (ЦП)
ГФ 24 – генератор тактовых импульсов (ГТИ) ВК 28 (38) – системный контроллер (СК)
ИК 57 – контроллер прямого доступа в память (КПДП)
ВН 59 – программированный контроллер прерываний (ПКП) ИК 55 – программируемый параллельный адаптер (ППА) ВИ 53 – программируемый интервальный таймер (ПИТ)
ВА 86 (87) – шинный формирователь (ШФ) ВГ 75 – контроллер клавиатуры и индикации
ВГ 79 – контроллер дисплея и клавиатуры (КД и КА) Это универсальный комплект.
Каждая магистраль подключается через соответствующие устройства сопряжения. Чем больше линий шин адреса, тем мощнее машина. Чем больше линий шин данных, тем интеллектуальнее машина.
Данные перердаются в параллельной форме.
Режим прямого доступа к памяти – информация передается из внешнего устройства в устройство памяти, минуя МП (через шину данных) DMA.
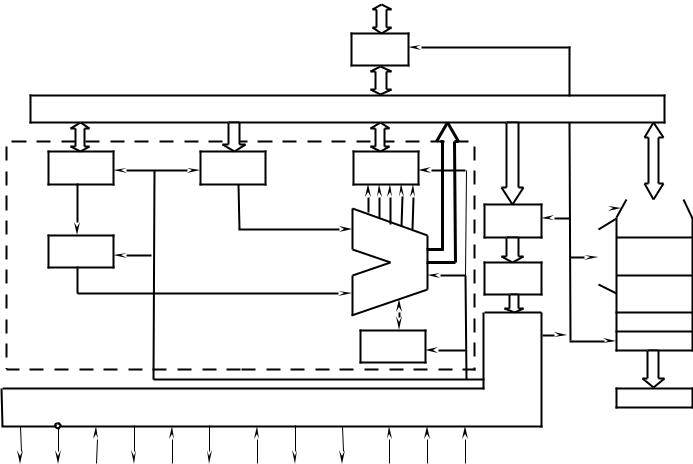
2 Структурная схема МП
к ш. Данных
|
|
БШД |
|
8-разрядная шина данных |
|
А |
БР |
РП |
РК
РЗА |
АЛУ |
|
ДШК
АЛБ |
|
|
|
|
|
|
|
DK |
|
УУ и |
|
|
|
|
|
|
|
|
|
синхр. |
|
|
|
|
|
|
|
|
|
|
|
|
ПМ |
ВД ЗПР |
РПР |
ЗПДП |
ППДП |
ГТ |
ОЖ |
Синхр. |
С1 |
С2 |
СБР. |
4
|
|
|
|
|
MS |
|
|
|
|
|
|
|
|
||
|
|
|
|
W |
|
Z |
|
|
|
|
|
|
|||
|
DШ |
|
B |
|
C |
||
|
|
D |
|
E |
|||
|
|
|
|
|
|||
|
|
|
H |
|
K |
||
|
|
|
|
||||
УС
СК
РА
БРА к ш.Адреса
ИК 80А представляет собой изготовленную по n-МОП технологии БИС, содержит 5 тыс. транзисторов, длина слова – 8 разрядов, тактовая частота – 2 МГц, уровни напряжения питания
± 5В, + 12 В.
Особенности МП:
∙Трехшинная структура с шинами данных, адреса и управления
∙Магистральные принципы связи, реализованные в виде связывающей основные узлы двунаправленной ШД, имеющей ширину 8 разрядов, равную длине слов, обрабатываемых МП
∙Наличие регистровой памяти, образованной программно-доступными общими и специальными регистрами (СК, УС), и регистрами временного хранения
∙Наличие средств организации стековой памяти
∙Наличие 16-разрядной ША (возможность прямой адресации любого байта в памяти)
∙Наличие операций над 2-байтными словами(обеспечивается спец.командами, тандемных пересылок)
∙Использование 3-х форматов команд и разнообразных способов адресации
∙Возможность реализации векторного многоуровневого приоритетного прерывания (ПКП)
∙Возможность организации ПДП (КПДП)
∙Наличие средств работы с подпрограммами и обработки запросов прерываний
МП состоит из 3 основных частей: АЛБ, Регистры, УУ

5
АЛБ – арифметический логический блок включает в себя:
АЛУ – 8-разрядная комбинационная схема, выполняющая арифметические и логические операции над 8-разрядными числами. К одному из входов схемы АЛУ всегда подключен Аккумулятор, к другому – любой из региров РОН через ШД. АЛУ имеет собственный регистр временного хранения БР, который позволяет избежать гонок, когда один из регистров РОН используется в одной операции как регистр источник и регистр приемник. АЛУ выполняет следующие операции: сложение, вычитание, и, или, исключающее или, инверсия, сдвиги,
приращения.
ДК – десятичный корректор – устройство, которое под воздействием специальной команды интерпретирует результат выполнения двоичной операции как результат операции десятичной арифметики. Коррекция осуществляется прибавлением двоичного кода числа шесть к младшей или старшей тетраде результата, когда содержимое их находится в пределах А – F или в случае
возникновения основного или дополнительного переноса.
Регистры МП:
А – аккумулятор –основной 8-разрядный регистр микропроцессора служит для хранения одного из операндов (до операции) и результата после нее. Все операции АЛУ выполняет через
А. Существуют микропроцессоры с несколькими А.
РЗА – регистр-защелка аккумулятора – 8-разрядный регистр. Хранит предыдущее значение аккумулятора, пока результат идет через регистр признаков (РП) в аккумулятор.
Благодаря ему аккумулятор не является источником и приемником АЛУ.
БР - буферный регистр операнда (8-разр.). Служит для промежуточного хранения 2-го
операнда (1-й операнд - в А).
РП – регистр признаков – 5-разрядный регистр (иногда называемый регистром состояния), связанный с АЛУ. В соответствующих разрядах фиксируются особенности выполнения каждой из операций. Он представляет собой набор триггеров, называемых флажками.
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
S |
Z |
0 |
H |
0 |
P |
1 |
C |
S – (sign) признак отрицательности числа Z – (zero) признак 0
H – признак переноса между тетрадами. Необходим для работы ДК P – признак четности числа единиц в результате
C – (carry) основной перенос – переполнение разрядной сетки
РК – регистр команд – предназначен для хранения кода текущей выполняемой команды. Выполнение каждой команды производится МП в строгой последовательности, определяемой
кодом команды, и синхронизируется во времени с сигналам ГТИ.
ДШК – дешифратор команд РОН – регистры общего назначения – используются для хранения операндов,
промежуточных и конечных результатов, а также адресов и индексов при косвенной и индексной адресациях. Причем регистры могут составлять пары (BC, DE, HL).
Особые регистры:
РС – счетчик команд (СК) (со схемой приращения +1) - используется для приема и
хранения адреса следующей команды (16)
SP – указатель стека (УС) 16-разрядный регистр, который содержит адрес ячейки стековой памяти занятой информацией (вершины стека). Используется стек обратного типа, т.е. при передаче в стек информации величина УС уменьшается, а при извлечении информации из стека УС – увеличивается.
HL – пара 8-разрядных регистров, которые могут использоваться совместно. В этом случае Н - старший байт, L - младший байт. Пару называют регистром адреса/данных. Регистры HL
6
являются универсальными: они могут быть инкрементированы, декрементированы, загружены данными или служить их источником. Особенностью HL является то, что они могут использоваться в качестве адресного регистра, т.е. хранить адрес назначения при размещении данных или источника при загрузке данных в МП. Пример: ADD M - команда сложить А с данными, расположенными по адресу HL.
Стек – область ОЗУ магазинного типа (последний пришел, первый вышел), в которой запись
и чтение информации производится через вершину стека.
РА – регистр адреса – 16-разрядный служит для приема и хранения в течение одного
машинного цикла адреса команды или операнда и выдачи его на буферный регистр адреса. Регистры W, Z – программно-недоступные регистры – предназначены для тандемных
пересылок, когда в цикле выполнения команды последовательно друг за другом передаются два
байта информации.
Устройство управления (УУ)
УУ и Синхр. – устройство управления и синхронизации МП состоит из двух отдельно независимых частей:
−Первичного автомата, управляющего процессами внутри МП
−Логической схемы, обрабатывающей входные сигналы и формирующей управляющие
сигналы в микропроцессорной системе.
Микрокоманды могут быть двух видов: |
|
|
||||
1 Управляющие |
31-1 - |
ВР1 используется для изменения последовательности команд в |
||||
зависимости от тех или иных условий. |
|
|
||||
2 Операционные |
31-0 - ВР0 - слово управляет вентильными схемами. |
|
||||
|
|
|
|
Сигналы устройства управления: |
|
|
ПМ |
DBIN |
Прием МП – сигнал высокого уровня, информация на ШД будет считана в МП |
||||
ВД |
WR |
Выдача данных – сигнал инверсный низкого уровня, показывает, что МП |
||||
|
|
выставил на ШД информацию |
|
|
||
ЗПР |
INT |
Запрос на прерывание – сигнал запроса прерывания высокого уровня от |
||||
|
|
внешнего устройства. Каждому сигналу соответствует своя программа |
||||
|
|
прерывания. |
|
|
|
|
РПР |
INTE |
Разрешение прерывания – сигнал высокого уровня, показывает, что |
||||
|
|
внутренний триггер прерывания в устройстве управления МП установлен в |
||||
|
|
«1», т.е. МП переходит в режим обслуживания прерываний |
|
|||
ЗПДП |
HOLD |
Запрос прямого доступа в память – сигнал высокого уровня, указывает на |
||||
|
|
зарос другими устройствами прямого доступа к памяти (чтение или запись), |
||||
|
|
для увеличения быстродействия |
|
|
||
ППДП |
HLDA |
Подтверждение прямого доступа в память – сигнал высокого уровня, |
||||
|
|
указывает на перевод ША и ШД в состояние высокого сопротивления |
||||
ОЖ |
WAIT |
Ожидание – сигнал высокого уровня. Для работы с внешними устройствами |
||||
ГТ |
READY |
Готовность – сигнал высокого уровня, показывает на готовность внешнего |
||||
|
|
устройства к обмену информацией, т.е. к синхронизации работы внешнего |
||||
|
|
устройства с АЛУ |
|
|
||
С1, С2 |
CLK1, |
Тактовые импульсы от ГТИ для того, чтобы МП производил действия. |
||||
|
CLK2 |
Применяются |
непересекающиеся |
последовательности |
(сдвинутые |
|
СИНХР |
SYNC |
относительно друг друга) для исключения гонок в узлах |
|
|||
Начало машинного цикла МП, вырабатывается Устройством управления |
||||||
СБР |
RESET |
Системный |
сброс. Находится на |
ГТИ и привязан к тактовой частоте. |
||
Обнуляется программный счетчик, сбрасывается УС и устройство переходит к начальной загрузке операционной системы или программы.

7
Работа управляющего автомата. Цикл и такт
Форматы команд:
1)В1 – однобайтные
2)В1, В2 – двухбайтные
3)В1, В2, В3 – трехбайтные
Команды должны располагаться последовательно в ячейках: в 1 ячейке код команды, в
остальных – информация, отличная от кода.
МЦ – машинный цикл – время выборки (извлечения) кода команды или 1 байта команды. МТ – машинный такт – время одного периода тактовой последовательности.
Т1 |
Т2 |
C1
t = 0.9 нс
t
C2
t
синхр.
t
строб
t
УУ может находиться в одном из следующих состояний (машинных циклов): выборки
(извлечения), декодирования, выполнения. Следует отметить, что МП всегда работает по принципу: извлечение - декодирование - выполнение
Строб /STSTB/ - сигнал малой длительности. Служит для вывода слова состояния SW МП для записи его в буферный регистр (во 2-м МТ). С его помощью МП знает, в какой МЦ вводить слово состояния. Вырабатывается ГТИ.
Выполнение рабочего цикла команды начинается с опроса триггера прерывания.
Если запрос прерывания поступил, то автомат передает управление программе обработки прерывания и выполняется соответствующая программа обслуживания данного запроса прерывания.
При отсутствии прерыванию управляющей автомат генерирует управляющие сигналы выборки команды из памяти и формирования в СК адреса следующей команды. После выборки команды автомат дешифрирует код операции (КОП) в команде и генерирует серию управляющих сигналов, соответствующих КОП, обеспечивая реализацию в МП заданной операции.
Код команды определяет количество машинных циклов, необходимых для выполнения данной команды. Каждая команда состоит из 1 до 5 машинных циклов. Каждый МЦ содержит от 3
до 5 машинных тактов.
Типы машинных циклов в зависимости от кода команды:
М1 – извлечение кода команды, М2 – Чтение памяти, М3 – Запись в память, М4 – Чтение стека, М5 – Запись в стек, М6 – Чтение внешнего устройства, М7 – Запись во внешнее устройство, М8 – Обслуживание прерывания, М9 – Обслуживание остановок, М10 – Обслуживание прерывания в режиме остановок.

|
Работа первичного автомата |
|
8 |
|||
|
|
|
||||
|
СБР |
|
|
|
|
|
|
Т1 |
|
|
|
|
|
|
v HLTA |
|
|
|
|
|
|
Т2 |
HLTA |
|
|
|
|
|
|
|
|
|
||
|
READY |
нет |
READY |
INT*INTE |
|
Тwн |
|
Тw |
|
(РПР*ЗПР) |
|
||
|
|
|
|
|
|
|
|
HOLD (ЗПДП) |
|
|
|
Уст ТТ2 (ЗПДП) |
|
|
нет |
Уст ТТ2 |
сброс |
|
|
|
|
|
|
Захват |
|||
|
Т3 |
|
|
|||
|
(зпдп) |
|
|
|
(режим ПДП) |
|
|
|
ПДП |
|
|
|
HOLD |
|
|
|
|
|
|
|
|
Т4 |
Режим |
|
|
Сброс ТТ2 (ПДП) |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Т5 |
|
|
|
|
|
|
HOLD |
|
HOLD (ПДП) |
|
|
|
|
|
|
|
|
||
|
|
Захват |
|
|
|
|
нет |
конец команды |
(режим ПДП) |
|
|
|
|
|
HOLD |
|
|
|
||
|
да |
|
|
|
||
|
Сброс ТТ2 (ПДП) |
|
|
|
||
нет |
|
|
|
|
||
ЗПР*РПР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уст. ТТ1 (РПР) |
|
|
|
|
|
Tw – такт ожидания по неготовности, Twн – такт ожидания по останову – эти состояния не |
||||||
связаны с тактовой частотой, их продолжительность неопределенная, т.к. зависит от внешних по |
||||||
отношению к МП событий. |
|
|
|
|
|
|
1 Первичный автомат находится в УУ. Цикл команды реализуется за 1-5 машинных циклов. Машинный цикл содержит от 3 до 5 машинных тактов Т. Каждый такт образует пара сигналов тактирования С1 и С2, поступающих от внешнего генератора. В начале каждого МЦ первичный автомат генерирует сигнал синхронизации СИНХР.
2 Подача сигнала высокого уровня на вход RESET длительностью не менее 3-х периодов такотвой частоты устанавливает МП в исходное состояние. Схема управления формирует сигнал Т1 выборки команды М1.
3 В такте Т2 идет анализ сигналов READY, HLTA, HOLD. При наличии сигнала высокого уровня на входе READY и отсутствии сигналов HLTA, HOLD МП переходит к такту T3. Если

9
выполнение команды не закончено, то МП переходит к следующему машинному циклу команды, начиная с такта Т1. В конце каждой команды МП проверяет наличие запроса прерывания. Если есть высокий уровень сигнала на входе INT и триггер разрешения прерывания установлен INTE=1, то МП устанавливает триггер прерывания ТТ1 и приступает к выполнению машинного цикла прерывания, начиная с Т1.
При наличии на входе READY сигнала низкого уровня в такте Т2 МП переходит в состояние ожидания Tw, пока не появится сигнал READY от внешнего устройства.
4 В такте Т2 при наличии сигналов на входах READY и HOLD производится установка внутреннего триггера захвата ТТ2. Переход к режиму захвата до такта Т3 не разрешается, чтобы МП мог закончить обмен с внешним регистром в начале такта Т3. По окончанию состояния захвата МП переходит к такту Т1 следующего МЦ. Если текущий МЦ содержит такты Т4 и Т5, то они совмещаются с режимом захвата.
5 В состоянии останова МП переходит при наличии сигнала HLTА, формируемого во втором машинном цикле команды HLT, при этом внутренние шины адреса и данных переводятся в высокоимпедансное состояние и появляется высокий уровень напряжения на выходе WAIT – выполнение программы прекращается. Из состояния останова МП выходит по сигналу сброса RESET или по сигналу запроса прерывания INT при установленном триггере разрешения прерываний INTE=1. В состоянии останова МП может переходить в режим захвата, если поступает сигнал высокого уровня на вход HOLD.
В конце каждой команды МП проверяет наличие запроса прерывания. Если есть высокий уровень сигнала на входе INT и триггер разрешения прерывания установлен в состояние «1», то МП фиксирует поступивший запрос прерывания во внутреннем триггере ТТ1 и приступает к выполнению машинного цикла прерывания, начиная с такта Т1.
Отличие машинного цикла прерывания от машинного цикла выработки состоит в том, что содержимое СК не инкрементируется, а запоминается в стеке с последующим восстановлением после окончания программы прерывания.
Слово состояния микропроцессора
Из хранимых признаков МП составляет свое |
слово |
состояния (1 байт). Содержит 8 |
|||||
разрядов: |
|
|
|
|
|
|
|
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
S |
Z |
0 |
H |
0 |
P |
1 |
C |
S – (sign) признак отрицательности числа
Z – (zero) признак 0
H – признак переноса между тетрадами. Необходим для работы ДК
P – признак четности числа единиц в результате
C – (carry) основной перенос – переполнение разрядной сетки

10
3 Способы адресации. Форматы команд Способ адресации – нахождение источников и приемников команды.
5 способов адресации: Регистровый – адрес регистра источника и приемника находится в коде команды (например, команды пересылки). Регистрово-косвенный – адрес ячейки памяти
находится как содержимое индексного (адресного, косвенного) регистра – регистровая пара HL. Непосредственный – информация находится в самой команде – во 2-м или 3-м байте команды. Прямой – в коде команды во 2-м или во 2-м и 3-м байте указывается адрес внешнего комплексного устройства или ячейки памяти. Стековый – включается механизм стековой памяти.
Адрес ячейки памяти находится как содержимое указателя стека.
Программная модель МП
B |
000 |
C |
D |
010 |
E |
H |
100 |
L |
|
|
M |
A |
111 |
F |
SPH |
|
SPL |
PCH |
|
PCL |
0000 
0001
65 536
FFFE 
FFFF
001
101011  } РОН
} РОН
110 Абстрактная ячейка памяти
Абстрактная ячейка памяти
 PSW – слово состояния программы, включающее аккумулятор и регистр
PSW – слово состояния программы, включающее аккумулятор и регистр
 SP – указатель стека
SP – указатель стека
 PC – программный счетчик
PC – программный счетчик
256
00  …
…  Порт ввода FF
Порт ввода FF 
256
00  …
…  Порт
Порт
вывода
FF 
Размер слова МП составляет 8 двоичных разрядов, поэтому разрядность всех регистров (кроме счетчика команд и указателя стековой памяти) составляет также 8 разрядов.
Для команд косвенной адресации и удвоенной длины слова РОН могут объединяться в пары BC, DE, HL. HL – индексный регистр. Служит для регистрово-косвенного способа адресации.
В регистрах B, D, H находится старший байт слова. C, D, E – младшие байты. F – регистр флагов и условий, использует 5 байтов из 8.
PC и SP – по 16 разрядов.