

aaaГОСЫ / Байдар ССПИ
.pdf1 Многофункциональные системы телемеханики (МСТМ).
Информационно-управляющая система (ИУС)
В распределенных АСУ ТП процессы сбора, помехоустойчивой передачи, обработки, распределения и отображения технологической информации реализуются МСТМ. МСТМ используются как в АСУ ТП, так и самостоятельно.
ТС, ТИ, ПД
МСТМ … МСТМ
ξ …
Д1 … ДN
|
|
|
|
|
|
|
|
ОУ |
|
УУ |
|
СОИ |
|
|
|
|
||||
|
|
|
|
|
|
|
ИУ1 … ИУN
ξ
МСТМ … МСТМ
ТУ, ТР
СОИ – среда отбора информации.
Д1 — ДN – датчики, преобразуют параметры контролируемых объектов в аналоговый или дискретный сигнал.
ИУ1 — ИУN – исполнительные устройства, воздействуют на элементы местной автоматики и регуляторы.
ОУ – объект управления, УУ – устройство управления.
Современные АСУ ТП представляют собой территориально распределенную систему управления и контроля от которой требуется надежность передачи и обработки информации.
{
Это не надо писать, но лучше пусть будет!!
МСТМ по виду передаваемой технологии информации: Тракт телерегулирования (ТР); Тракт телеуправления (ТУ); Тракт телеизмерения (ТИ); Тракт телесигнализации (ТС); Тракт передачи данных (ПД).
}
2 Многофункциональные системы телемеханики и их место в АСУ ТП.
МСТМ реализуют:
1.Сбор информации о техническом состоянии оконечных устройств (ОУ);
2.Помехоустойчивую передачу аналоговой и цифровой информации;
3.Отбор и регистрацию информации о техническом состоянии объектов и техпроцессов в удобном для оператора виде;
4.Доставку и распределение управляющей информации получателям для воздействия на управляемые объекты и процессы.
АСУ ТП (обобщенная структура) Информация контроля:
1.Телесигнализация (ТС);
2.Телеизмерения (ТИ);
3.Передача данных (ПД).
От надежности МСТМ зависит надежность всей АСУ. Классификация МСТМ.
По виду передаваемой технологии информации:
1.Тракт телерегулирования (ТР);
2.Тракт телеуправления (ТУ);
3.Тракт телеизмерения (ТИ);
4.Тракт телесигнализации (ТС);
5.Тракт передачи данных (ПД). По степени интеграции информации:
1.Простые системы телемеханики – один и тот же вид трафика: ТУ, ТС, ТИ, и т. д.
2.Многофункциональные системы телемеханики (МСТМ) – разнообразные виды трафика: ТУ-ТС, ТУ-ТС-ТИ, ТУ-ТС-ТИ-ПД и т. д.
По рассредоточенности:
1.Для сосредоточенных;
2.Для рассредоточенных объектов.
Контролирующий (исполнительный) пункт (КП(ИП)) – комплекс аппаратно-
программных средств, реализующий информационные процессы, связанные со сбором и передачей информации телеконтроля (ТС, ТИ, ТД), и приемом и распределением командной информации (ТУ, ТР).
Пункт управления (ПУ)/Диспетчерский пункт (ДП) – комплекс аппаратно-
программных средств, реализующий информационные процессы, связан с передачей распределяемой информации (ТУ, ТР) и приемом, отображением и регистрацией информации телеконтроля (ТС, ТД, ПД).
В МСТМ для сосредоточенных объектов расстояние между объектами телемеханики в пределах КП значительно меньше, чем расстояние между КП и ПУ.
3 Тенденция развития и требования предъявляемые к МСТМ.
Требования:
1.Открытость;
2.Надежность и безопасность;
3.Расширяемость и масштабируемость;
4.Поддержка разных видов трафика;
5.Управляемость и мониторинг.
4 Одноканальная система передачи информации. |
|
|
|
|||||||
|
КИ |
КК |
М |
КФ |
КФ |
|
ДМ |
КДК |
ДКИ |
|
ИИ |
И |
m |
П |
|
SA SA |
|
|
n |
m |
ПИ |
m |
n |
|
|
|
|
П |
m |
V |
||
|
|
|
|
|
|
|||||
1 |
2 |
3 |
|
4 |
|
5 |
6 |
7 |
|
8 |
|
|
|
Г |
|
ξ |
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
||
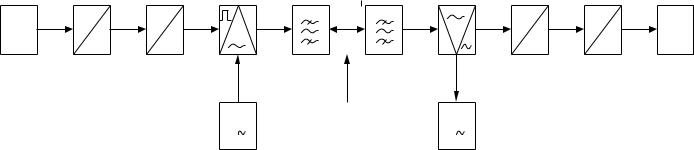
Одноканальные системы передачи информации (СПИ) являются основой самых сложных систем телемеханики и коммуникации сетей при реализации ими помехоустойчивой передачи информации с использованием различных технологий.
Свыхода источника информации (ИИ) идут сообщения или отображающий его сигнал, являющийся в общем случае функцией времени.
Сигнал поступает на вход кодирующего преобразователя (кодер источника (КИ)), который производит АЦ-преобразование.
Свыхода кодера источника избыточный m-значный сигнал поступает на вход кодера канала (КК), реализующий процесс помехоустойчивого кодирования.
m = 4 – количество символов, k = 3 – избыточность, n = 7 – общее число. n = m + k.
Свыхода КК n-значное сообщение поступает на вход модулятора (М).
Модуляция – операция линейного изменения одного или нескольких параметров переносчика функции от передаваемого сообщения.
П=П0+ΔП x
X – передаваемый сигнал, П0 – исходное значение модуляции, П – постоянное значение модуляции.
На линейный сигнал воздействует помеха, следовательно на вход канального фильтра приходит искаженный сигнал.
Свыхода демодулятора цифровая последовательность, содержащая в общем случае ошибки, поступает на вход канального декодера (КДК), реализующего тот или иной алгоритм декодирования избыточных кодов.
Свыхода КДК скорректированная информационная последовательность поступает на вход декодера источника (ДКИ), который реализует определенное преобразование цифровой последовательности в квантованный отсчет, а затем в аналоговый сигнал.
Различают две модели взаимодействия сигнала помехи и линейного сигнала:
1.Аддитивная S'=S+ξ
2.Мультипликативная S'=S ξ
ξ – помеха Модель 1 адекватно описывает искажение в канале связи, если основной причиной
искажений является атмосферные и промышленные шумы и прочие случайные внешние воздействия.
Модель 2 описывает помехи, вызванные случайными изменениями параметров линейных преобразователей, приводящих к случайному изменению АЧХ и ФЧХ канала связи.
5 Математические модели дискретных каналов связи.
Простейшим примером взаимодействия двух дискретных источников без памяти является двоичный симметричный канал (ДСК). Он является дискретной двоичной моделью передачи информации по каналу с аддитивным белым гауссовским шумом (АБГШ).
Такая модель успешно применяется для моделирования канала связи методом Монте-Карло и для расчетов при проверке эффективности алгоритмов помехоустойчивого кодирования.
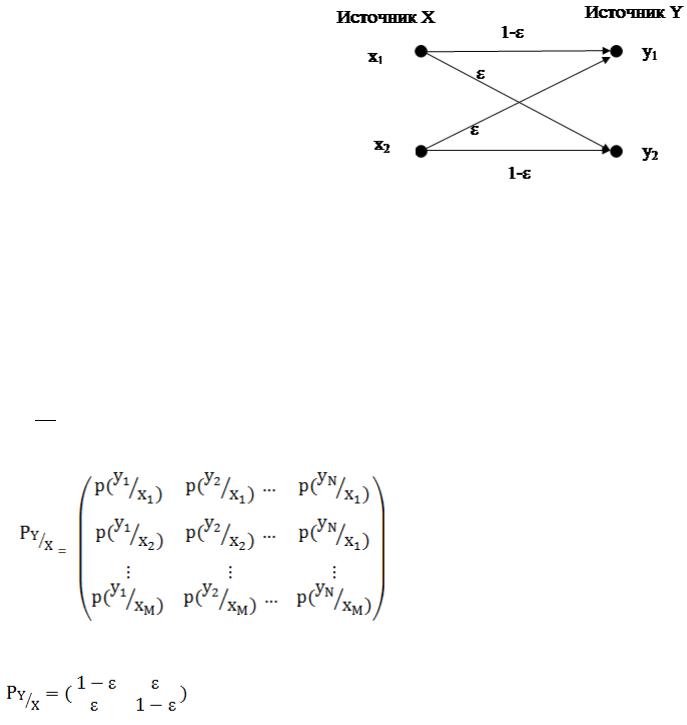
Двоичный симметричный канал описывается с помощью диаграммы переходов, где представляются возможные переходы двоичных символов (0,1) источника Х в двоичные символы источника Y.
Каждому переходу приписана переходная вероятность, причем считают, что при передаче двоичной информации
по каналу ошибка происходит с вероятностью ε. Значит ошибочным переходам соответствует вероятность ε, а правильным переходам - вероятность (1-ε)
Эквивалентом диаграммы переходов является матрица канала. Она содержит переходные вероятности и является стохастической матрицей, у которой сумма всех элементов каждой строки равна 1.
Матрица канала с входным алфавитом, состоящим из M символов xi и выходным алфавитом, состоящим из N символов yi, содержит все переходные вероятности
P(Yj ) и имеет вид:
Xi
Для дискретного двоичного симметричного канала матрица будет иметь вид:
Из симметрии переходов следует, что равномерное распределение символов на входе канала влечет за содой равномерное распределение символов выходных символов.
Запишем условные и взаимные информации всех возможных пар событий,

предполагая равномерное распределение входных символов. Тогда для ДСК будут имеем:
Отсюда следует, что:

6 Общие принципы обнаружения и исправления ошибок избыточными кодами.
M0 – полное множество всех возможных комбинаций кода с мощностью кодового алфавита равной K и длиной кодового слова равной n.
M – множество различных комбинаций кода.
M=km ; m=[logM] ; [x] – ближайшее целое большее х. m – число информационных символов кода.
k=n−m – число избыточных символов кода. M0−M – число запрещенных комбинаций кода.
Меры избыточного кода: |
|
|
|
||||
RI= |
M0−M |
RII= |
n−m |
|
|||
|
|
– полная оценка; |
|
– грубая оценка |
|||
M |
0 |
n |
|||||
|
|
|
|
||||
Скорость передачи информации (информационная содержательность) – величина, обратная RII для двоичных кодов (k = 2): Rи=1−RII=m/n log22 [бит/симв.].
Обозначим двоичный n-разрядный кодовый вектор (кодовую комбинацию) через
v=(a |
a |
,a |
,...,a ),a=0,1 |
|
|
|
|
|
|
|
|
|
¯ |
1, |
2,... |
i |
n i |
|
|
|
|
,...,a' |
|
|
=0,1 |
|
|
|
|
v'=(a' |
1, |
a' |
2,... |
,a' |
n |
),a' |
||
Обозначим n-разрядный вектор ошибки через ¯ |
|
i |
|
i |
|
|||||||
Примем аддитивную модель взаимодействия передаваемого вектора и вектора ошибок (шума), т. е v' = v e
Для двоичного канала ошибка при передаче i-го символа означает его инверсию. (Метрика кодового пространства)
Норма (величина) кодового вектора равна его весу: ||v¯||=w(v¯) ; w – вес кодового вектора.
Расстояние между двумя кодовыми векторами: d(v¯1, v¯2)=|v¯1−v¯2| равно весу разности векторов по модулю, т. е. d(v¯1, v¯2)=w(v¯1−v¯2)
При k = 2:
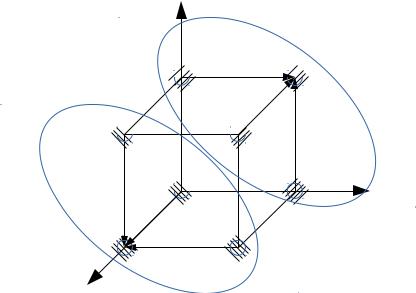
7 Геометрическая модель кода.
Геометрическая модель n-мерного кода представляет собой n-мерный куб,
размещенный в n-мерном пространстве. При этом, по каждой из n взаимно ортогональных осей откладываются k различных значений ординат, каждая из которых равна одному из k значений соответствующего разряда кода.
Геометрическая модель – 3d куб, каждая из 8 вершин соответствует кодовой комбинации двоичного неизбыточного кода.
Каждое ребро куба соответствует расстоянию Хемминга d = 1.Минимальное расстояние между ребрами рабочей комбинации dmin = 2.
001 011
011
011 111
111
000 100
100
010 110
8 Связь между кодовым расстоянием Хемминга и максимальной кратностью обнаруживаемых и исправляемых ошибок.
S – максимальная кратность исправляемых ошибок перехода; r – максимальная кратность обнаружения ошибок; eC – максимальная кратность обнаружения ошибок стирания; dmin – минимальное расстояние.
Утверждение 1. Чтобы код обнаруживал любые ошибки кратности r и меньше, должно соблюдаться условие: dmin r+1 .
Сигнальные зоны кода состоят только из рабочих комбинаций, таким образом, если между комбинациями кода расстояние не меньше r + 1, то не существует никакой ошибки кратности r и меньше, которая перевела бы в одну комбинацию кода в сигнальную зону другой, следовательно все ошибки кратности r и меньше будут обнаружены.
Утверждение 2. Чтобы код исправлял любые ошибки кратности S и меньше, должно соблюдаться условие: dmin 2S+1
В сигнальную зону каждой рабочей комбинации (РК) кода входят кроме РК еще и запрещенные комбинации, удаленные от РК на S и меньше. Сигнальные зоны не должны пересекаться. Для этого достаточно: dmin 2S+1 , т. к. непересекающиеся зоны каждой рабочей комбинации разделены, по крайней мере, одним переходом. При соблюдении неравенства любая ошибка кратности S и меньше не способна перенести рабочую комбинацию в чужую сигнальную зону, и, следовательно, будет исправлена в соответствии с правилами принятия решений.
Утверждение 3. Для того чтобы код обнаруживал и исправлял ошибки кратности S и кратности от S+1 до r, необходимо: dmin S+r+1
Проанализированная в утверждении 2 конструкция сигнальной зоны кода, исправляющего S-кратные ошибки, согласно условиям непересечения требует расстояние между сигнальными зонами равное 2S + 1.
Пусть r=S+Δ , тогда dmin S+r+1 гарантирует выполнение требования dmin 2S+1 , т. е ошибки кратности S и меньше будут исправлены. При этом ошибки кратности S<r' r=S+Δ(Δ 1) порождают запрещенные комбинации, не принадлежащее ни одной сигнальной зоне, ибо они удалены от соответствующей рабочей комбинации на кодовое расстояние > S, в то же время они не переводят рабочую комбинацию в чужую сигнальную зону, т. е. Будут обнаружены.
Утверждение 4. Чтобы код исправлял ошибки кратности S и ошибки кратности eC,
необходимо dmin 2S+e+1
В двоичном канале со стиранием алфавит на выходе цифрового канала состоит из трех символов: 0, 1, х, где х – символ стирания. Пусть в принятом кодовом слове произошло eC ошибок стирания и S ошибок перехода. Для исправления S ошибок перехода необходимо минимальное произведение расстояния между любыми частями кодовых комбинаций, состоящих из уверено принятых сигналов, было не меньше 2S + 1. Таким образом, чтобы удовлетворялись оба вышеупомянутых условия необходимо dmin 2S+e+1
9 Матрицы. Групповые коды. Задание группового кода.
Линейные групповые коды (ЛГК)
Линейными называются коды, в которых проверочные символы представляют собой линейные комбинации информационных символов.
Для двоичных кодов в качестве линейной операции используют сложение по модулю 2.
Сложение и умножение элементов кода по модулю 2 (четности) производится по следующим правилам:
0 0 = 0; |
0 1 = 1; |
1 1 = 0 |
0 0 = 0; |
0 1 = 1; |
1 1 = 1 |
Кодовый вектор – последовательность нулей и единиц, принадлежащих данному коду.
Свойства:
1) Сумма (разность) кодовых векторов дает вектор, принадлежащий данному коду. ЛГК относятся к систематическим кодам. Минимальное расстояние равно минимальному весу нулевых кодовых векторов. ЛГК обозначается (П, nu) и задается с помощью производящих матриц. Производящая матрица строится как результат слияния информационной (И) и проверочной (П) матриц.
СП,nu=И П
1 |
0 |
0 ... |
|
0 |
1 |
0 ... |
|
И=Inu=(00 |
00 |
...1 ...1) |
Матрица имеет nk – столбцов и nu – строк. |
В качестве П выбирают комбинации 1 и 0. Чем больше единиц в матрице, тем оптимальней считается матрица в точке обнаружения вероятности ошибок.
Вес |
каждой строки |
матрицы (П): WП=d0−1 . Таким образом пораждающая |
||||
матрица (С) приводится к следующему виду: |
||||||
|
|
|
|
¿ |
|
|
|
|
|
|
100...0 |
P11 |
P1nk |
C |
nk |
= 010...0 |
P21 |
P2nk |
||
|
,nu |
( |
|
|
|
|
|
|
|
00...1 |
Pnu1 |
Pnu nk) |
|
Строки производящей матрицы представляют собой nu комбинации исходного кода. Остальные комбинации кода можно получить двумя способами:
1)как результат сложения строк производящей матрицы составленных в различных сочетаниях
2)ЛГК можно построить по производящей матрице, используя информационную часть кода, путем суммирования строк матрицы П.