

Как понимать квантовую механику
.pdf434 |
ГЛАВА 15 |
деленному¨ неприводимому представлению группы квантовых вращений SU(2). Тем самым мы получили каждое неприводимое представление группы квантовых вращений SU(2) по одному разу.
15.3. Спин 12
Волновая функция частицы со спином 12 может быть представлена как функция ψ(r, σ) от координат r R3 и спиновой переменной (проекция спина на ось z) σ {−12 , + 12 }. При этом удобно считать, что σ нумерует строки столбца из двух элементов. Можно также считать, что аргумент у волновой функции по прежнему один — r, зато значением функции в точке считается не комплексное число, а комплексный столбец из двух строк:
|
|
ψ(r, + |
1 ) |
|
· |
|
ψ(r, − |
2 |
|
2 ) |
||||
ψ(r, ) = |
|
|
1 |
= ψ(r). |
Мы можем считать, что спиновая переменная — это такая координата, описывающая дополнительную дискретную спиновую степень свободы. Более того, часто удобно считать, что спин и движение частицы как целого — отдельные невзаимодействующие (или слабо взаимодействующие) подсистемы. Отсутствие взаимодействия координат и спина — это отсутствие в гамильтониане слагаемых, которые действуют одновременно на спин и координаты.
В пределе отсутствия взаимодействия, как и для любых других невзаимодействующих подсистем, если волновая функция факторизуется (разлагается на множители, зависящие от отдельных координат) в начальный момент времени, то она остается¨ факторизованной и во все последующие моменты времени, причем¨ множители эволюционируют независимо.
То есть если гамильтониан представим в виде
ˆ ˆ ˆ ˆ ˆ
H = Hr 1s + 1r Hs,
где операторы с индексом r действуют только на координаты частицы, а с индексом s — только на спин, то волновая функция может разлагаться на слагаемые вида
ψ(r, σ) = φ(r) · χ(σ), i¯h |
∂φ |
ˆ |
i¯h |
∂χ |
ˆ |
∂t |
= Hrφ, |
∂t |
= Hsχ, |
φ(r) называют координатной волновой функцией, а χ(σ) — спиновой волновой функцией.

15.3. СПИН |
1 |
435 |
|
2 |
|
В соответствии с процедурой, описанной выше (15.2.4 «Собственные
|
|
|
|
ˆ |
|
ˆ2 |
»), мы можем выписать операторы компонент для |
|||||||||||||
векторы операторов jz , j |
||||||||||||||||||||
спина 1 |
: |
|
|
|
|
|
|
, sˆ− = sˆ+† = |
|
|
, |
|
|
|||||||
2 |
|
|
|
|
|
|
0 1 |
0 0 |
|
|
||||||||||
|
|
|
|
sˆ+ = |
|
|
|
|||||||||||||
|
|
|
|
|
0 0 |
1 0 |
|
|
||||||||||||
|
sˆ+ + sˆ |
|
1 0 1 |
|
|
|
sˆ+ + sˆ |
1 |
|
0 i |
|
1 |
+1 0 |
|||||||
sˆx = |
|
− |
= |
2 1 0 , sˆy = |
|
2i |
− |
|
= 2 i −0 , sˆz = |
2 |
0 −1 . |
|||||||||
|
2 |
|
|
|||||||||||||||||
Базисные состояния с определенным¨ значением σ (проекции на ось z) |
||||||||||||||||||||
принято обозначать по-разному: |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
1 |
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 , + 2 # = |
0 = |
| ↑ = |1 , |
|
|
|
||||||||||
|
|
|
|
|
1 |
|
1 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
2 |
|
−2 # |
1 |
|
|
| ↓ |
|
| |
|
|
|
|
|||
|
|
|
|
|
, |
= |
|
. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
= |
|
|
= 0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Последний вариант |0 и |1 обычно применяется в квантовой теории информации, когда спин используется в качестве квантового бита (кубита).
15.3.1. Матрицы Паули
Пространство эрмитовых матриц 2 × 2 четырехмерно:¨ два диагональных элемента вещественны, два комплексных элемента вне главной диагонали комплексно сопряжены друг другу. В качестве базиса в пространстве эрмитовых матриц 2 × 2 можно выбрать, например, три матрицы sˆα, для спина 12 и единичную матрицу E.
Однако матрицы sˆα имеют собственные числа ±12 , что не слишком удобно: удобнее чтобы собственные числа равнялись по модуле единице. Поэтому вместо спиновых матриц sˆα вводятся σ-матрицы Паули, отличающиеся от спиновых матриц умножением на 2. Иногда в качестве σ-матрицы номер 0 рассматривают единичную матрицу E:
σ = (σx, σy, σz ), |
σα = 2ˆsα, α {1, 2, 3}, |
σ0 = E, |
|
|||||||
|
1 0 |
, σx = |
0 1 |
, σy |
|
0 |
i |
, σz = |
+1 0 |
. |
σ0 = |
0 1 |
1 0 |
= |
i |
−0 |
0 −1 |
||||
Матрицы Паули могут применяться не только для спинов 12 , но и для любых двухуровневых (с двумерным пространством состояний) систем, т. е. для любых кубитов. Любая эрмитова матрица 2 × 2 разлагается по
15.3. СПИН |
1 |
437 |
|
2 |
|
|
α |
|
α |
cos |
α |
+ nz i sin |
α |
|
n |
|
i sin |
α |
α . |
||
Rn(α) = E cos |
+ iσn sin |
= |
2 |
|
α |
2 |
|
α− |
|
|
2 |
||||
2 |
2 |
n+i sin |
|
cos |
|
nz i sin |
|||||||||
|
|
|
|
|
|
|
2 |
|
|
2 |
− |
|
|
2 |
|
Как мы и ожидали, для полуцелого спина 12 поворот на полный угол 2π соответствует оператору −E.
Получившаяся спиновая матрица поворота Rn(α) является матрицей 2 × 2, унитарна (как экспонента от эрмитовой матрицы, умноженной на i) и имеет единичный определитель, таким образом
Rn(α) SU(2).
15.3.2. Кватернионы**
Читатель, знакомый с понятием кватернионов, должен был почувствовать в предыдущем разделе что-то смутно знакомое, особенно в формуле (15.15), в которой перемешались скалярное и векторное произведение.
Это сходство можно сделать изоморфизмом, если ввести соответствие между матрицами 2 × 2 и кватернионными единицами:
E → 1,
−iσx → i, −iσy → j, −iσz → k.
Теперь таблица умножения σ-матриц превращается в стандартную таблицу умножения базисных кватернионов:
2-й множитель → |
1 |
i |
j |
k |
1-й множитель : 1 |
1 |
i |
j |
k |
i |
i −1 |
k |
−j |
|
j |
j −k −1 |
i |
||
k |
k |
j −i −1 |
||
Кватернион общего вида получается как линейная комбинация базисных с вещественными коэффициентами:
A = A0 + Axi + Ayj + Axk = A0 + A.
При этом A0 называют скалярной частью кватерниона, а A = Axi + Ayj + + Axk — векторной частью.

438 |
ГЛАВА 15 |
Кватернионы являются обобщением комплексных чисел, при котором вместо одной мнимой оси вводится трехмерное¨ пространство. Это пространство изотропно, в том смысле, что собственные вращения в нем¨ не меняют алгебраических соотношений между кватернионами. Более того, любая двумерная плоскость в пространстве кватернионов, содержащая вещественную ось, устроена так же, как обычная комплексная плоскость.
Для кватернионов определено сложение, вычитание, умножение и взятие обратного элемента (от ненулевых элементов). Причем,¨ поскольку умножение кватернионов некоммутативно, определено два разных деления: левое (умножение на обратный элемент слева) и правое (умножение на обратный элемент справа).
Для кватернионов определяют сопряженный¨ кватернион, абсолютную величину, обратный элемент:
¯ |
− A = − |
1 |
(A + iAi + jAj + kAk), |
||
A = A0 |
2 |
||||
2 |
2 |
2 |
|
¯ |
|
|A| = A0 |
+ A = AA, |
||||
|
¯ |
|
|
|
|
A−1 = |
A |
. |
|
|
|
2 |
|
|
|||
|
|A| |
|
|
||
Обратите внимание, в отличие от комплексного сопряжения, кватернионное сопряжение выражается через сложение и умножение, из-за этого над кватернионами не удается¨ создать интересной теории аналитических функций (т. к. аналитические и антианалитические функции совпадают). Таким образом, хотя кватернионы и были придуманы как «обобщенные¨ комплексные числа» в надежде на то, что с их помощью можно будет столь же удобно решать трехмерное¨ уравнение Лапласа, как в двумерии с помощью аналитических функций, это ожидание не оправдалось3.
Если построить кватернион с произвольными комплексными компонентами (комплексный кватернион), то мы потерям деление — обратный элемент не будет определен¨ не только для нуля, но и для других элементов. Этого и следовало ожидать, т. к. кватернионному умножению мы сопоставили матричное умножение, а кватернионам с произвольными комплексными коэффициентами соответствуют произвольные матрицы 2 × 2, в том числе и необратимые.
Векторная часть кватерниона представляется как антиэрмитова матрица 2 × 2, таким образом спиновый оператор вращения, с учетом¨ соответ-
3Кватернионы были придуманы У. Р. Гамильтоном 16 октября 1843 года во время прогулки с женой по берегу Королевского канала в Дублине. Уравнения i2 = j2 = k2 = ijk = −1 были написаны им на камне Брукхемского моста.
15.3. СПИН |
1 |
439 |
|
2 |
|
ствия iσn → −n, естественным образом переписывается как единичный (по модулю) кватернион:
Rn(α) = e− |
α |
2 n = cos α2 − n sin α2 , |Rn(α)| = 1. |
15.3.3. Геометрия чистых состояний кубита**
Состояния квантовой системы определены с точностью до произвольного ненулевого множителя, так что, хотя пространство спиновых состояний (или состояний любой другой двухуровневой системы) — это двумерное комплексное пространство C2, для нумерации физически различимых состояний нам не надо задавать два комплексных числа, а достаточно их отношения. Таким образом, любое спиновое состояние, кроме единственного состояния | ↓ , может быть представлено в виде
|χ = | ↑ + λ| ↓ , λ C.
Состояние | ↓ соответствует пределу λ → ∞.
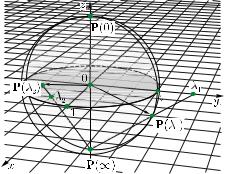
Рис. 15.2. Проекция комплексной плоскости на сферу Римана
То есть топологически пространство чистых состояний для спина 12 получается из комплексной плоскости C добавлением бесконечной точки,
¯
и мы получаем сферу Римана C.
Оказывается, что в данном случае сфера Римана имеет также хорошую физическую интерпретацию.
Пусть точка λ = x + iy откладывается на плоскость (x, y), как на комплексной плоскости. Как принято в теории функций комплексного
440 |
ГЛАВА 15 |
 z
z
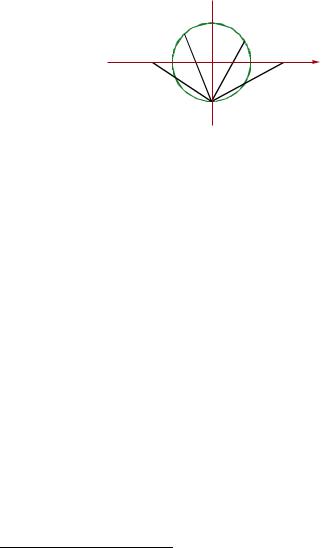
Рис. 15.3. Сечение проекции комплексной плоскости (ось λ) на сферу Римана из южного полюса.
переменного, спроецируем точку λ с плоскости (x, y) на единичную сферу, с центром в начале координат. Проекцию будем проводить из южного полюса сферы, т. е. из точки с координатами (0, 0, −1). Такая проекция даст нам взаимно-однозначное соответствие между точками сферы (кроме южного полюса) и точками комплексной (экваториальной) плоскости4 C (без
|
|
|
|
|
¯ |
|
|
|
|
|
бесконечной точки). Бесконечная точка на C соответствует южному полюсу |
||||||||||
сферы Римана. |
|
|
|
|
|
|
|
|
|
|
При этом, как можно легко убедиться, точка на сфере в точности соот- |
||||||||||
|
|
|
|
|
σ для спина в состоянии χ: |
|||||
ветствует вектору поляризации P = |
||||||||||
|
Re λ |
|
|
|
|
Im λ |
|
2 |
|
|
σx = |
|
, |
σy = |
|
, |
σz = |
1 − |λ| |
. |
||
1 + |λ| |
2 |
2 |
2 |
|||||||
|
|
|
|
|
1 + |λ| |
|
1 + |λ| |
|||
|
|
|
|
|
|
|
|
|
|
|
При стремлении λ к бесконечности P стремится к направлению вдоль |
||||||||||
оси z. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если мы будем измерять проекцию спина на вектор P , то мы с вероят- |
||||||||||
|
|
|
|
|
|
|
||||
ностью 1 получим, что спин направлен вдоль P , и его проекция на P равна |
||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
+ 2 . Таким образом, спин в некотором смысле направлен вдоль P .
15.3.4. Геометрия смешанных состояний кубита**
Смешанное состояние спина 12 (или для любой другой двухуровневой системы) задается¨ матрицей плотности 2 × 2. Матрица плотности должна
4В нашем случае комплексная плоскость рассекает сферу Римана по экватору, но в литературе иногда сфера Римана касается плоскости одним из полюсов. Различие между такими проекциями — масштабный фактор 2, т. к. в последнем случае плоскость в 2 раза дальше от точки проекции.
15.3. СПИН |
1 |
441 |
|
2 |
|
быть эрмитовой, положительно определенной¨ (вероятности положительны) и иметь единичный след (суммарная вероятность равна 1).
Как мы уже упоминали ранее (15.3.1 «Матрицы Паули»), любая эрмитова матрица 2 × 2 разлагается по базису из матриц Паули и единичной матрицы с вещественными коэффициентами. При этом след матриц Паули равен нулю, так что мы можем написать
|
|
|
|
|
|
|
|
|
|
ρ = |
E + (P , σ) |
|
|
3 |
|
|
| 1. |
||
|
|
2 |
, |
P = (Px, Py, Pz ) R |
, |
|P |
|||
Коэффициент |
1 |
перед единичной матрицей фиксирован условием tr ρ = 1. |
|||||||
|
2 |
|
|
|
|
|
|
|
|
Любой вектор является собственным для единичной матрицы с собственным числом 1. Таким образом, собственные векторы матрицы ρ совпадают
|
|
|
|
|
|
|
|
с собственными векторами матрицы (P , σ). Поскольку собственные числа |
|||||||
|
|
|, то собственные числа матрицы ρ имеют вид |
|||||
матрицы (P , σ) равны ±|P |
|||||||
|
|
|
|
|
|
|
|
|
|
p |
± |
= |
1 ± |P | |
0. |
|
|
|
|
|
||||
|
|
|
2 |
|
|
||
|
|
|
|
|
| 1. |
||
Условие положительности вероятности требует, чтобы |P |
|||||||
Мы получили, что спиновая матрица плотности параметризуется вектором, лежащим внутри единичной сферы. При этом поверхность сферы соответствует обращению в 1 одного из собственных чисел (другое при этом обращается в нуль), т. е. поверхности сферы соответствуют чистые состояния, как в и предыдущем разделе (15.3.3 «Геометрия чистых состояний кубита 12 »).
Для того чтобы определить физический смысл вектора P , вычислим среднее σ по состоянию ρ:
σα = tr(σαρ) = 12 tr(σα + σαPβ σβ ) = 12 tr(δαβ EPβ ) = Pα 12 tr E = Pα.
Мы использовали формулу (15.14) умножения σ-матриц и тот факт, что след от любой σ-матрицы равен 0.
Таким образом, вектор P имеет смысл среднего вектора поляризации по состоянию ρ
P = σ = tr(ρσ).
Для чистых состояний (точек на поверхности сферы) это полностью соответствует результатам, полученным ранее.
