

Pankratov_V_V_Uchebnoe_posobie_po_AUEP_Avtorsk
.pdfLраз |
( ) |
|
|
|
M O |
|
|
|
|
|
20 |
|
c |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
lg() |
|
|
|
|
|
|
cp |
|
a |
|
|
|
|
|
40 |
|
|
|
|
Рис. 4.2 – ЛАЧХ разомкнутого контура, настроенного на МО ( cp – частота среза; c – частота сопряжения среднечастотной и высокочастотной асимптот)
В замкнутом состоянии контур, настроенный на МО, имеет передаточную функцию (ПФ)
зам |
1 ko |
|
|
|
|
WM O ( p) |
|
|
|
, |
(4.2) |
a 2 p2 a |
|
||||
|
p 1 |
|
|||
|
|
|
|
|
|
где ko – коэффициент главной обратной связи в данном контуре,
что при a 2 соответствует колебательному звену с коэффициентом демпфи-
|
|
|
рования 1 |
2 0,707 . |
|
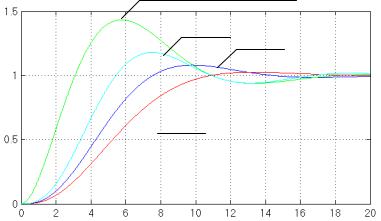
Переходные характеристики системы (4.2) по выходу для различных зна-
чений настроечного параметра a и ko 1 изображены на рис. 4.3. Стандартной величине a 2 соответствуют следующие прямые показатели качества:
|
время регулирования tрег (по вхождению переходной характеристики в |
|||||
|
5%-ную зону установившегося значения) |
– |
4,1 |
; |
|
|
|
|
|
|
|
|
|
|
время первого согласования t |
|
– |
4,7 |
; |
|
|
согл |
|
|
|
|
|
|
время достижения первого максимума t |
max |
– |
6,28 |
|
; |
|
|
|
|
|
||
|
перерегулирование max ,% |
|
– |
4,3%. |
|
|
51

h(t ) a 1
a 2
 a 3
a 3
t t
Рис. 4.3 – Переходные характеристики системы с ПФ (4.2)
Имея в виду самый внутренний контур регулирования в структуре САР,
изображенной на рис. 4.1, и отбрасывая нижний индекс «1», кратко проанали-
зируем, какие регуляторы порождает настройка контура на МО для различных типовых динамических звеньев в компенсируемой части объекта управления.
Структурная схема рассматриваемого контура приведена на рис. 4.4.
uз ( p) |
|
|
|
|
uy ( p) |
|
|
|
1 |
|
|
|
|
x( p) |
|
|
Wp ( p) |
|
|
|
|
Wk ( p) |
|
||||||
|
|
|
|
|
|
|
|
p |
1 |
|
|
|||
|
|
(-) |
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
ko
Рис. 4.4 – Структурная схема внутреннего контура СПР
Сначала получим общую формулу для определения передаточной функ-
ции регулятора. Для этого приравняем ПФ контура в разомкнутом состоянии
(место размыкания показано на рис. 4.4 двумя косыми линиями) к ПФ системы,
настроенной на МО (4.1):
W |
( p) W |
|
( p) |
|
1 |
W ( p)k |
W раз ( p) |
|
1 |
|
. |
|
|
|
|
|
|
||||||
|
|
p 1 |
a |
p ( |
|
||||||
раз |
|
p |
|
k o |
M O |
p 1) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
52
Отсюда следует, что
Wp ( p) |
1 |
|
|
1 |
|
. |
|
|
|
|
|||
a |
|
W ( p)k |
|
|||
|
p |
o |
||||
|
|
|
|
k |
||
Таким образом, регулятор компенсирует действие Wk ( p) благодаря наличию в его модели обратной ПФ Wk 1( p) . Физически компенсация инерционности
Wk ( p) осуществляется автоматической форсировкой переходного процесса пу-
тем динамического увеличения управляющего воздействия uy (t) относительно его установившегося значения и поясняется ниже.
Перейдем к примерам.
1. Пусть Wk |
k |
|
, т.е. компенсируемая часть объекта представляет собой |
||||||||||
|
|
||||||||||||
|
|
||||||||||||
|
Tp 1 |
|
|
|
|
|
|
|
|
|
|
||
апериодическое звено. Тогда |
|
|
|
|
|
|
|
||||||
|
|
W |
p |
( p) |
1 |
|
Tp 1 |
K |
п |
|
Kи |
. |
|
|
|
a p |
|
|
|||||||||
|
|
|
|
|
|
kk |
|
p |
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
o |
|
|
|
|
|
Звено данного типа называется изодромным, а регулятор с такой ПФ –
пропорционально-интегральным (ПИ). Благодаря наличию в структуре ПИ-регулятора интегрирующего звена, не охваченного внутренней об-
ратной связью, достигается астатизм первого порядка (отсутствие стати-
ческой ошибки регулирования) синтезируемого контура как по задающе-
му, так и по возможному возмущающему воздействию (на рис. 4.4 не по-
казано). Для иллюстрации механизма форсировки переходного процесса на рис. 4.5 качественно изображены переходные характеристики рассмат-
риваемого контура при T 5,0 ; ko 1; k 1; a 2 .
5,0 ; ko 1; k 1; a 2 .
53

uз (t )
uy (t )
x(t )
t t
Рис. 4.5 – Переходные характеристики контура с компенсируемым апериодическим звеном по управляющему воздействию и выходу
2. Если компенсируемая часть ОУ описывается колебательным звеном, и
|
|
|
|
|
Wk ( p) |
|
|
k |
|
|
|
, |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
T 2 p2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
ATp 1 |
|
|
|
|
|||||||
то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
( p) |
1 |
|
T 2 p2 |
ATp 1 |
K |
|
|
K |
и |
pK |
|
. |
||||
|
p |
|
|
|
|
|
|
п |
|
|
д |
||||||||
|
a p |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
kk |
|
|
|
|
|
p |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
o |
|
|
|
|
|
|
|
|
|
|
|
|
Эта |
ПФ |
соответствует |
|
|
пропорционально-интегрально- |
||||||||||||||
дифференциальному (ПИД) регулятору. Он также содержит интегриру-
ющее звено, в связи с чем контур с ПИД-регулятором является астатиче-
ским.
3.В некоторых системах компенсируемая часть ОУ может быть безынерци-
онной, а регулятор применяется лишь для подавления действия внешнего возмущения. Тогда Wk ( p) k , и в результате синтеза получаем инте-
гральный (И) регулятор с ПФ
54
W |
p |
( p) |
1 |
|
1 |
|
Kи |
, |
a p |
|
|
||||||
|
|
|
kk |
|
p |
|||
|
|
|
|
|
||||
|
|
|
|
|
o |
|
|
|
который, естественно, также обеспечивает астатизм контура. Такой И-
регулятор, в частности, можно встретить в контуре регулирования ЭДС двухзонной САР скорости с зависимым ослаблением потока и безынер-
ционным датчиком.
4.Как будет ясно из последующих разделов пособия, на практике довольно часто встречается компенсируемая часть объекта, которая сама описыва-
ется интегрирующим звеном, Wk ( p) k p . В этом случае регулятор кон-
p . В этом случае регулятор кон-
тура, настроенного на МО, оказывается пропорциональным (П):
Wp ( p) |
1 |
|
1 |
Kп , |
|
a |
kk |
||||
|
|
|
|||
|
|
|
o |
|
что подразумевает наличие в контуре статической ошибки регулирования по любому постоянно действующему возмущению, точка приложения которого структурно предшествует компенсируемой части ОУ. По зада-
ющему воздействию контур остается астатическим. В частности, так про-
исходит при настройке на МО контура регулирования скорости электро-
привода, построенного по структуре СПР с подчиненным контуром регу-
лирования тока якоря (момента), что препятствует достижению широкого диапазона регулирования (см. раздел 1.3).
Для систем, компенсируемая часть ОУ в которых содержит интегрирую-
щее звено, и разработана вторая, специальная стандартная настройка – симмет-
ричный оптимум.
4.2.2. Настройка на симметричный оптимум
Стандартная настройка контура регулирования на симметричный опти-
мум (нем. das symmetrische Optimum) предложена C. Kessler [11, 12] и соответ-
ствует фильтру Баттерворта третьего порядка [9]. Она характеризуется значи-
тельно худшими по сравнению с МО показателями качества переходных про-
55

цессов, но позволяет обеспечить астатизм первого порядка по возмущению в контурах с интегрирующей компенсируемой частью.
В разомкнутом состоянии контур, настроенный на симметричный опти-
мум (СО), описывается передаточной функцией
|
|
a2 p 1 |
|
a2 p 1 |
|
|||||
W раз( p) W раз ( p) |
|
|
|
|
|
|
, |
(4.3) |
||
a2 |
|
|
a3 2 p2 |
|
|
|||||
CO |
M O |
p |
|
( |
p 1) |
|
||||
|
|
|
|
|
|
|
|
|
|
|
т.е. с целью повышения порядка астатизма в желаемую разомкнутую систему вносится еще одно интегрирующее звено, причем для обеспечения устойчиво-
сти и необходимого качества переходных процессов по возмущению контур также дополняется форсирующим звеном.
Соответствующая передаточной функции (4.3) асимптотическая ЛАЧХ изображена на рис. 4.6. Она симметрична относительно точки пересечения с осью ординат, чем, по-видимому, и обусловлено название стандартной настройки.
|
Lраз |
( ) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
CO |
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
c2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lg() |
|
|
|
1 |
|
|
|
|
|
|
|
||||
|
c1 |
|
|
|
|
1 |
|
|
|
|
|
||
a2 |
|
|
|
|
|
|
|
||||||
a |
|
|
|
||||||||||
|
|
|
|
|
cp |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
40 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.6 – ЛАЧХ разомкнутого контура, настроенного на СО
В замкнутом состоянии контур, настроенный на СО, имеет передаточную функцию
56

|
(a2 |
p 1) |
k |
|
|
|||
W зам ( p) |
|
|
|
|
o |
, |
(4.4) |
|
|
|
|
|
|
|
|||
CO |
a3 3 p3 |
a3 2 p2 |
a2 p 1 |
|
|
|||
|
|
|
||||||
|
|
|
|
|
|
|
|
|
где ko – по-прежнему коэффициент главной обратной связи.
Внесенное в контур с целью динамической коррекции форсирующее звено по-
вышает порядок числителя (4.4) и неблагоприятно сказывается на перерегули-
ровании САР |
по |
задающему воздействию, которое при a 2 составляет |
|||
|
max |
43,4% |
( t |
рег |
14,7 ). Для уменьшения перерегулирования до прием- |
|
|
|
|
||
лемых значений на задающий вход контура, настраиваемого на СО, устанавли-
вают апериодический фильтр (задатчик интенсивности) с ПФ
W ( p) (a2 |
p 1) 1 . |
(4.5) |
|
ф |
|
|
|
В результате структурная схема контура принимает вид, изображенный на рис. 4.7, а ПФ контура с фильтром по задающему воздействию записывается как
|
|
W зам |
( p) |
|
|
1 ko |
|
|
|
|
|
. |
|
|
(4.6) |
|||||||
a3 3 p3 |
a3 2 p2 |
a2 |
|
|
|
|
||||||||||||||||
|
|
COф |
|
|
p 1 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
uз ( p) |
|
|
|
|
|
|
|
|
|
uy ( p) |
|
|
|
|
|
|
|
|
|
|
x( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
k |
|
|||
Wф ( p) |
|
|
Wp ( p) |
|
|
Wk ( p) |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
p 1 |
|
|
p |
|
||||||||
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
(-) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ko |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.7 – Структурная схема контура, настроенного на СО
Переходная характеристика системы (4.4), соответствующая стандартной настройке ( a 2 ), и переходные характеристики системы (4.6) по выходу для различных значений настроечного параметра a при ko 1 изображены на рис. 4.8. Стандартная величина a 2 в контуре с фильтром (4.5) дает следующие прямые показатели качества:
57
время регулирования tрег (по вхождению переходной характеристики в |
||
5%-ную зону установившегося значения) |
– |
11,93 ; |
|
|
|
время нарастания tнар (по первому вхождению переходной характеристи-
|
ки в 5%-ную зону установившегося значения) – |
7,02 |
; |
||
|
|
|
|
|
|
|
время первого согласования t |
|
– |
7,56 |
; |
|
согл |
|
|
|
|
|
время достижения первого максимума t |
max |
– |
9,84 |
; |
|
|
|
|
|
|
|
число колебаний l |
|
– |
1; |
|
|
перерегулирование max ,% |
|
– |
8,15%. |
|
Без фильтра (a 2)
h(t )
a 1,7
a 2
 a 2,3
a 2,3
t t
Рис. 4.8 – Переходные характеристики систем с ПФ (4.4) и (4.6)
Приравняем ПФ контура в разомкнутом состоянии (место размыкания вновь показано на рис. 4.8 двумя косыми линиями) к ПФ системы, настроенной на СО (4.3):
|
|
|
|
1 |
|
|
|
|
a2 |
|
p 1 |
|||
W |
( p) W |
p |
( p) |
W ( p)k W раз( p) |
|
|
|
|
|
. |
||||
p 1 |
|
3 2 |
|
2 |
|
|
||||||||
раз |
|
|
k |
o |
CO |
a |
p |
( p 1) |
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда
58
|
a2 p 1 |
|
1 |
|
||
Wp ( p) |
|
|
|
, |
||
a3 2 p2 |
Wk ( p)ko |
|||||
|
|
|
||||
|
|
|
|
|
||
или для интегрирующей компенсируемой части ОУ (Wk ( p) k p ):
p ):
|
a2 |
p 1 |
|
1 |
|
||
Wp ( p) |
|
|
|
|
. |
||
a3 2 p |
kko |
||||||
|
|
|
|||||
|
|
|
|
|
|
||
Таким образом, настройка на СО в этом случае порождает ПИ-регулятор, а сле-
довательно, обеспечивает астатизм контура регулирования по возмущению.
4.2.3. Синтез одноконтурной САР скорости микроэлектропривода
постоянного тока
Прежде чем перейти непосредственно к синтезу систем подчиненного ре-
гулирования координат электроприводов, рассмотрим, как можно использовать стандартную настройку на МО в однозонных одноконтурных САР скорости ЭП постоянного тока. Такая структура системы регулирования находит примене-
ние в микроэлектроприводах мощностью до нескольких сотен ватт, где в силу значительного активного сопротивления якорной цепи ток двигателя в режиме короткого замыкания отличается от номинального не более чем в 2…2,5 раза, и
нет необходимости в системном токоограничении. В качестве управляемого преобразователя электрической энергии в подобных системах, как правило, ис-
пользуются транзисторные импульсные усилители мощности, работающие в режиме широтно-импульсной модуляции (глава 6 учебного пособия).
При рассмотренных в следующем абзаце ограничениях на быстродей-
ствие синтезируемой САР объект управления такого ЭП можно приближенно описать уравнениями системы «ОП-Д» из раздела 2.5. Тогда расчетная струк-
турная схема линеаризованной одноконтурной системы регулирования скоро-
сти принимает вид, изображенный на рис. 4.9, здесь: Wpc( p) – передаточная функция регулятора скорости ЭП; k – коэффициент передачи главной обрат-
59

ной связи САР, который определяется как отношение номинального значения сигнала задания uз к номинальной частоте вращения н .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mс ( p) |
|
|
|
|
|
uз ( p) |
|
uy ( p) |
|
|
|
|
eп ( p) |
|
|
|
|
|
iя ( p) |
|
M ( p) |
(-) |
|
|
|
( p) |
|||||||
W ( p) |
|
kп |
|
|
|
|
|
1 Rэ |
|
cФн |
|
|
|
1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
(-) |
pc |
|
|
Tп p 1 |
|
|
(-) |
|
Tэ p 1 |
|
|
|
|
|
|
|
Jp |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
eя ( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cФн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 4.9 – Структурная схема однозонной одноконтурной САР скорости
Так как частота широтно-импульсной модуляции (ШИМ) транзисторно-
го преобразователя довольно высока (несколько килогерц), постоянная времени ОП, формально моделирующая временнýю дискретность преобразователя по управлению, а также возможные задержки и фильтры на его управляющем вхо-
де, довольно мала и может быть принята в качестве некомпенсируемой. Для самого распространенного на практике способа модуляции питающего напря-
жения по двум фронтам «треугольного» опорного сигнала частота дискретиза-
ции (квантования по времени) управляющего воздействия fd преобразователя равна удвоенной частоте ШИМ, и эквивалентная постоянная времени ОП,
обеспечивающая квазинепрерывность (почти непрерывность) САР и возмож-
ность использования модели рис. 4.9, приближенно определяется неравенством
Tп |
|
, |
(4.7) |
|
|||
|
f d |
|
|
где – эмпирический параметр, причем для аналоговой системы управления преобразователем с натуральной выборкой 0,5...1, а для цифровой системы с выборкой на частоте fd , вычислительной задержкой на один период кванто-
вания и экстраполятором нулевого порядка (узлом выборки и хранения) на вы-
60