

2.2. Типові завдання та приклади їх розв’язання
Завдання 1. Підсилювач радіорелейної станції може перебувати в одному з таких станів: S1 – підсилювач працездатний; S2 – підсилювач непрацездатний; S3 – підсилювач у стані пошуку несправності; S4 – підсилювач у стані усунення несправності. Відомі апріорні інтенсивності переходу з одного стану в інший: 12=2, 23=4, 34=4, 41. Знайти ймовірність працездатного стану станції у сталому режимі.
Розв’язання. Припускаючи, що всі інтенсивності переходів, окрім заданих за умовою, дорівнюють нулю, зобразимо граф станів радіорелейної станції (рис. 2.2).
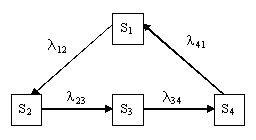
Рис. 2.2
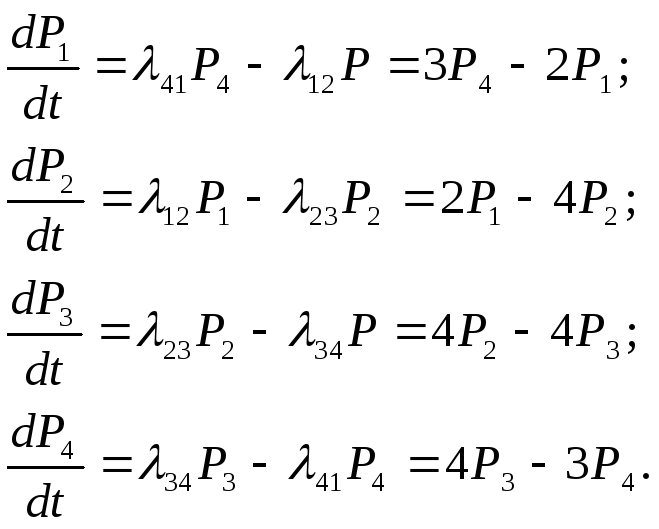
Користуючись відомим правилом, запишемо систему рівнянь Колмогорова для знайденого графа:
Для сталого режиму, доповнюючи системи рівнянь умовою нормування, дістанемо:

Розв'яжемо цю систему рівнянь методом послідовної підстановки:
![]()
Таким
чином імовірність працездатного стану
підсилювача радіорелейної станції
![]() .
.
Завдання 2. Планова діагностика системи автоматичного регулювання освітлення робочих місць передбачає триразовий контроль у моменти часу t1, t2, t3. При цьому: система може перебувати у таких станах: S1 – система працездатна; S2 – система непрацездатна, а несправність локалізована до рівня блока; S3 – несправність локалізована до рівня функціонального вузла; S4 – несправність локалізована до рівня елемента.
Відомо, що у початковий момент часу система перебувала у стані S1. Знайти ймовірність станів системи після третього контролю, якщо перехідні ймовірності задано: Р12=0,4; Р13=0,2; Р14=0,1; Р23=0,4; Р34=0,7; Р24=0,2.
Розв’язання. Аналізуючи логіку системи, побудуємо граф станів (рис. 2.3).

Рис. 2.3
Знаходимо
відсутні ймовірності в матриці
![]() виходячи з умови, що сума ймовірностей
переходу у відповідному рядку дорівнює
одиниці:
виходячи з умови, що сума ймовірностей
переходу у відповідному рядку дорівнює
одиниці:
Р11=1-(Р12+Р13+Р14)=0,3; Р22=1-(Р21+Р23+Р24)=0,4;
Р33=1-(Р31+Р32+Р34)=0,3; Р44=1-(Р41+Р42+Р43)=1.
Тоді матриця:

Знайдемо ймовірності відповідних станів системи на різних k кроках (у різні моменти контролю), починаючи з нульового.
Якщо k=0, Р1(0)=1; Р2(0)= Р3(0)= Р4(0)=0.
Ймовірність
станів на першому кроці (після першого
контролю) визначається першим рядком
матриці
![]() ,
тобто
,
тобто
якщо k=1, Р1(1)=0,3; Р2(1)=0,4; Р3(1)=0,2; Р4(1)=0,1.
Ймовірність станів на наступних кроках знайдемо, скориставшись формулою (2.2):
Якщо k=2, Р1(2)=Р2(1)Р11=0,30,3=0,09;
Р2(2)=Р1(1)Р12+Р2(1)Р22=0,30,4+0,40,4=0,28;
Р3(2)=Р1(1)Р13+Р2(1)Р23+Р3(1)Р33=0,30,2+0,40,4+0,20,3=0,28;
Р4(2)=Р1(1)Р14+Р2(1)Р24+Р3(1)Р34+Р4(1)Р44=0,30,1+0,40,2+0,20,7+0,11=0,35;
Якщо k=3, Р1(3)=Р1(2)Р11=0,090,3=0,027;
Р2(3)=Р1(2)Р12+Р2(2)Р22=0,090,4+0,280,4=0,148;
Р3(3)=Р1(2)Р13+Р2(2)Р23+Р3(2)Р33=0,090,2+0,280,4+0,280,3=0,214;
Р4(3)=Р1(2)Р14+Р2(2)Р24+Р3(2)Р34+Р4(2)Р44=0,090,1+0,280,2+0,280,7+0,351=0,611;
Виходячи з одержаних результатів після третього контролю (на третьому кроці) ймовірність працездатного стану Р1(3)=0,027, ймовірність локалізації несправності до рівня блока Р2(3)=0,148, ймовірність локалізації несправності до рівня функціонального вузла Р3(3)=0,214, ймовірність локалізації до рівня елемента Р4(3)=0,611.