

Момент инерции
Моментом
инерции системы
(тела) относительно данной оси называется
физическая величина, равная сумме
произведений масс n материальных точек
системы на квадраты их расстояний до
рассматриваемой оси:
![]() В
случае непрерывного распределения масс
эта сумма сводится к интегралу
В
случае непрерывного распределения масс
эта сумма сводится к интегралу
![]() где
интегрирование производится по всему
объему тела. При этом величина r в есть
функция положения точки с координатами
х, у, z. В качестве примера будем искать
момент инерции однородного сплошного
цилиндра высотой h и радиусом R относительно
его геометрической оси (рис. 1).
где
интегрирование производится по всему
объему тела. При этом величина r в есть
функция положения точки с координатами
х, у, z. В качестве примера будем искать
момент инерции однородного сплошного
цилиндра высотой h и радиусом R относительно
его геометрической оси (рис. 1).
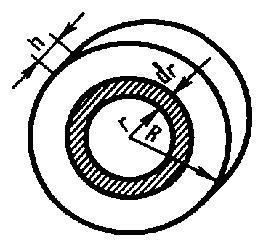
Рис.1
Разобьем
цилиндр на отдельные полые концентрические
цилиндры бесконечно малой толщины dr с
внутренним радиусом r и внешним r+dr.
Момент инерции отдельного полого
цилиндра dJ=r2dm
(так как dr<<r, то считаем, что расстояние
всех точек цилиндра от оси равно r), где
dm - масса всего элементарного цилиндра;
его объем 2πrhdr. Если ρ-плотность материала,
то dm=2πrhρdr и dJ=2πhρr3dr.
Тогда момент инерции сплошного
цилиндра
![]() но
так как πR2h - объем цилиндра, то его масса
m=πR2hρ, а момент инерции
но
так как πR2h - объем цилиндра, то его масса
m=πR2hρ, а момент инерции
![]() Если
мы знаем момент инерции тела относительно
оси, проходящей через его центр масс,
то мы можем найти и момент инерции
относительно любой другой параллельной
этой оси, который можно найти с
помощью теоремы
Гюйгенса-Штейнера: момент
инерции тела J относительно произвольной
оси равен моменту его инерции
Jc относительно
параллельной оси, проходящей через
центр масс С тела, сложенному с
произведением массы m тела на квадрат
расстояния а между осями:
Если
мы знаем момент инерции тела относительно
оси, проходящей через его центр масс,
то мы можем найти и момент инерции
относительно любой другой параллельной
этой оси, который можно найти с
помощью теоремы
Гюйгенса-Штейнера: момент
инерции тела J относительно произвольной
оси равен моменту его инерции
Jc относительно
параллельной оси, проходящей через
центр масс С тела, сложенному с
произведением массы m тела на квадрат
расстояния а между осями:
![]() Приведем
значения моментов инерции (табл. 1) для
некоторых тел (тела считаются однородными,
m - масса тела).
Приведем
значения моментов инерции (табл. 1) для
некоторых тел (тела считаются однородными,
m - масса тела).

11.Основные уравнения динамики вращательного движения твердого тела.
Основной закон динамики вращательного движения можно получить из второго закона Ньютона для поступательного движения твердого тела
![]() ,
(1.6)
,
(1.6)
где F – сила, приложенная к телу массой m; а – линейное ускорение тела.
Если
к твердому телу массой m в
точке А (рис. 5) приложить силу F,
то в результате жесткой связи между
всеми материальными точками тела все
они получат угловое ускорение ![]() и
соответственные линейные ускорения,
как если бы на каждую точку действовала
сила
и
соответственные линейные ускорения,
как если бы на каждую точку действовала
сила ![]() .
Для каждой материальной точки можно
записать:
.
Для каждой материальной точки можно
записать:
![]() ,
,
где ![]() , поэтому
, поэтому
![]() ,
(1.7)
,
(1.7)
где mi –
масса i-й
точки; ![]() –
угловое ускорение; ri –
ее расстояние до оси вращения.
–
угловое ускорение; ri –
ее расстояние до оси вращения.
Умножая левую и правую части уравнения (1.7) на ri, получают
![]() ,
(1.8)
,
(1.8)
где ![]() –
момент силы – это произведение силы
–
момент силы – это произведение силы ![]() на
ее плечо
на
ее плечо ![]() .
.
Плечом
силы называют кратчайшее расстояние
от оси вращения “ОО” (рис. 5) до линии
действия силы ![]() .
.
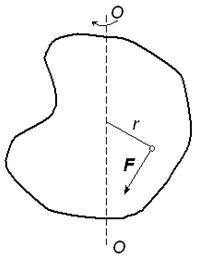
Рис. 5. Твердое тело, вращающееся под
действием силы F около оси “ОО”
![]() –
момент
инерции i-й
материальной точки.
–
момент
инерции i-й
материальной точки.
Выражение (1.8) можно записать так:
![]() .
(1.9)
.
(1.9)
Просуммируем левую и правую части (1.9) по всем точкам тела:
 .
.
Обозначим  через М,
а
через М,
а ![]() через J,
тогда
через J,
тогда
![]() (1.10)
(1.10)
Уравнение
(1.10) – основной закон динамики вращательного
движения твердого тела. Величина –
геометрическая сумма всех моментов
сил, то есть момент силы F,
сообщающий всем точкам тела ускорение
–
геометрическая сумма всех моментов
сил, то есть момент силы F,
сообщающий всем точкам тела ускорение ![]() .
. –
алгебраическая сумма моментов инерции
всех точек тела. Закон формулируется
так: «Момент силы, действующий на
вращающееся тело, равен произведению
момента инерции тела на угловое
ускорение».
–
алгебраическая сумма моментов инерции
всех точек тела. Закон формулируется
так: «Момент силы, действующий на
вращающееся тело, равен произведению
момента инерции тела на угловое
ускорение».
Мгновенное
значение углового ускорения ![]() ,
есть первая производная угловой
скорости
,
есть первая производная угловой
скорости ![]() по
времени
по
времени ![]() ,
то есть
,
то есть
 ,
(1.11)
,
(1.11)
где ![]() –
элементарное изменение угловой скорости
тела за элементарный промежуток
времени
–
элементарное изменение угловой скорости
тела за элементарный промежуток
времени ![]() .
.
Если в выражение основного закона (1.10) поставить значение мгновенного ускорения (1.11), то
 или
или ![]() , (1.12)
, (1.12)
где ![]() –
импульс момента силы – это произведение
момента силы
–
импульс момента силы – это произведение
момента силы ![]() на
промежуток времени
на
промежуток времени ![]() .
.
![]() –
изменение
момента импульса тела,
–
изменение
момента импульса тела, ![]() –
момент импульса тела есть произведение
момента инерции J на
угловую скорость
–
момент импульса тела есть произведение
момента инерции J на
угловую скорость ![]() ,
а
,
а ![]() есть
есть ![]() .
.
Поэтому
основной
закон динамики вращательного движения
твердого тела формулируется так: “Импульс
момента силы ![]() ,
действующий на вращательное тело, равен
изменению его момента импульса
,
действующий на вращательное тело, равен
изменению его момента импульса ![]() ”:
”:
![]() или
или ![]()