

1.4. Контрольні запитання до лекциї 1
Які задачі має робототехніка?
Яке призначення промислового роботу?
Як поділяються роботи на три генерації?
Який пристрій називається маніпулятором?
Що називається механізмом?
Як поділяються на класи кінематичні пари?
Дайте означення ланці, кінематичнії пари, кінематичному ланцюгу.
Назвіть основні кінематичні пари, поясніть ділення пар на вищі та нижчі, покажіть можливі і неможливі рухи ланок відносно одна одної. Приведіть приклад прострової пари.
Опишіть класифікацію кінематичних пар. Ознаки класифікації?
Які кінематичні ланцюги замкнені, незамкнені?
Яка система ланок є кінематичний ланцюг?
Сукупність поверхнь, ліній і крапок ланки, по яких вона може стикатися з іншою ланкою, утворюючи кінематичну пару, називають елементом кінематичної пари.Кінематичной парою називають поєднання єлементів двох зіткнених між собой ланок, яке допускає їх відносний рух. Ланкою називають одно чі декілька відностно непорушних зіткненням твердых тел, вхлдящих до составу механізма (ползун 1). Ползун по видношенням до напрямній може рухатися лишь поступательно, тому кінематичну пару в даному випадку називають поступательною.
Позначте кінематичні пари на схемі механізму.Скільки ступенів волі мають надані на малюнку кінематичні пари? Якого вони класу?
Накресліть схеми найпростіших механізмів?
Які ви знаєте види схопів маніпуляторів?
Перелічте види приводів ПР?
Як розподіляються системи управління ПР?
Які характеристики ПР ви знаєте?
Як класифікують ПР?
 Кінематичним
ланцюгом називають спонукуване з'єднання
ланок. Яку характеристику кінематичного
ланцюга, зазначеного на рисунку, можна
дати?
Кінематичним
ланцюгом називають спонукуване з'єднання
ланок. Яку характеристику кінематичного
ланцюга, зазначеного на рисунку, можна
дати?
 Кульовий
шарнір на рисунку в загальній класифікації
кінематичних пар відноситься, як
указувалося, до третього класу і є
просторовою парою. Назовіть координати,
рух навколо яких здійснює механізм.
Кульовий
шарнір на рисунку в загальній класифікації
кінематичних пар відноситься, як
указувалося, до третього класу і є
просторовою парою. Назовіть координати,
рух навколо яких здійснює механізм.
Маніпулятором називають технічний пристрій, призначений для відтворення робочих функцій рук людини. Нахвіть тип кінематичних пар у механізмі.

Кінематичні пари мають геометричне і силове замикання. Я



 кий
тип замикання вимагає кінематична пара
«площину-куля»?
кий
тип замикання вимагає кінематична пара
«площину-куля»?
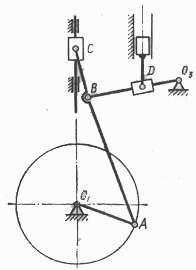
2 3.Скільки
ланок у цьому кулісному механізмі?
3.Скільки
ланок у цьому кулісному механізмі?
т
 ри;
ри;чотири;
п'ять;
шість.
2
 4.
Визначите клас кінематичної пари –
сферичної з двома пальцями - по класифікації
І. А. Артоболевского.
4.
Визначите клас кінематичної пари –
сферичної з двома пальцями - по класифікації
І. А. Артоболевского.

2 5.Визначите
клас кінематичної пари по класифікації
И. А. Артоболевского.
5.Визначите
клас кінематичної пари по класифікації
И. А. Артоболевского.
26. Визначите клас кінематичної пари.

27. Визначите клас кінематичної пари по класифікації И. А. Артоболевского.

28. Визначить клас кінематичної пари по класифікації І. А. Артоболевского.

30. Визначить класи кінематичних пар у схемах механіхмів, які наведені у додатках 1 – 35.
Поясніть, які ланки вони з/єднують.
Лекція 2
Структурний аналіз
2.1. Структура просторового кінематичного ланцюга.
Структурна формула.
Якщо число ланок кінематичного ланцюга дорівнює n, то загальне число мір свободи, яким володіють n ланок до їхнього з'єднання кінематичними парами є 6n.
З'єднання ланок накладує різноманітне число зв'язків на відносний їхній рух і залежить від класу пар.
Нехай число кінематичних пар в ланцюзі I-ого класу є Р1, число пар 2-ого класу – Р2, число пар 3-ого класу – Р3, число пар 4-ого класу – Р4, число пар 5-ого класу – Р5. Тоді з 6n мір свободи необхідно виключити тих, які ліквідуються кіне
матичними парами. Внаслідок кінематичний ланцюг, до якого входить і стояк механізму, має число мір рухомості (класифікація по Артоболевскому І. І.)
W = 6n – 5p5 – 4p4 – 3p3 – 2p2 – p1 (2.1)
Число мір рухомості W кінематичного ланцюга, що до непорушного стояка визначається з виразу
W = 6(n – 1) – 5p5 – 4p4 – 3p3 – 2p2 – p1
Нехай (n – 1) = k, де k - число рухомих ланок механізму, тоді отримаємо
W = 6 k – 5p5 – 4p4 – 3p3 – 2p2 – p1 ,
а![]() бо
бо
,
де pi - число кінематичних пар якого-те певного класу:
і - число накладення зв'язків на пару певного класу.
Формула (2.1) вперше була дана П. І. Сомовим і розвинута А. П. Малишевим. Тому носить назву Сомова - Малишева.
Визначимо число мір свободи механізму робота "Версатран". Його кінематична схема представлена на рис. 22.
Механізм має 5 рухомих ланок і стояк. Значить k = 5, n = 6. Всі кінематичні пари в ньому 5 класу, мають H =1, S = 5, тобто р5 = 5. Тоді число мір свободи механізму визначимо по формулі W = 6 5 – 5 5 = 5.
Механізм володіє п’ятью мірами рухомості. Стрілками на рисунку показані 5 рухів, що мають ланки: три обертальних і два поступальних.
Т. я. для приведення до руху механізму маніпулятора "Версатран" треба забезпечити 5 незалежних рухів, т. п . зробити 5 ланок ведучими.

Рис. 18
Рис.22