

1.3.6. Системи управління пр
Улаштування системи управління ПР здійснює автоматичне управління його маніпуляторами і пристріями [ ].
Згідно з назвами ґенерацій роботів розрізняють наступні прилади управління ПР:
програмні (I ґенерація ПР), що здійснюють управління виконавчим влаштуванням по заздалегідь введеної і незмінної в процесі реалізації керуючій програмі;
адаптивні (2-га ґенерація ПР), які реалізують управління виконавчим влаштуванням у функції від параметрів, що контролюють стан зовнішньго середовища і стан роботи з автоматичною зміною керуючої програми;
інтелектуальні (3-тя ґенерація ПР), де адаптивні прилади розвинуті і доповнені спроможністю планувати поведінку робота залежно від поставленої задачі, критеріїв якості, власного стану робота і стану зовнішнього середовища.
По засобу управління розрізняють прилади:
циклового управління – коли рух робітничого органу ПР визначається тільки становищем початкової і кінцевої точок. Точки визначаються при допомозі шляхових приладів релейного типу, що задають час, або механічних упорів;
позиційного управління – коли рух робітничого органу ПР відбувається по заданим точкам позиціювання вздовж траєкторії руху;
контурного управління – коли рух робітничого органу ПР відбувається вже по заданої траєкторії з установленим розподілом в часу значень швидкості.
ПР звичайно оснащені інформаційно-вимірювальними приладами. Вони поділяються на дві групи. Перша група – влаштування чутливості, що забезпечують робота зовнішньою інформацією про параметри технологічної операції. Звичайно це здійснюється за допомогою сенсорних приладів. Друга група – внутрішньої інформації про стан вузлів і підсистем дійсно маніпулятора.
Можна перерахувати датчики, що є сенсорніми приладами. Це контактні, струйні, індуктивні, локаціонні, електромагнитні, телевізійні датчики. Датчики моментів, температури і зусиль.
1.3.7. Основні характеристики пр
I. Число мір рухомості механізму (рис. 20) більш детально буде розглянуте далі.
М
 аневреність
визначається як число мір свободи
механізму при непорушному (фіксованому)
становищі охоплення, підведенного до
точки. Маневреність дозволяє обминути
складні перешкоди і виконати складні
операції з об'єктом маніпулювання,
підійти до заданої точки. Маневреність
маніпулятора залежить не тільки від
вигляду і числа кінематичних пар, але
і від їхнього розташування.
аневреність
визначається як число мір свободи
механізму при непорушному (фіксованому)
становищі охоплення, підведенного до
точки. Маневреність дозволяє обминути
складні перешкоди і виконати складні
операції з об'єктом маніпулювання,
підійти до заданої точки. Маневреність
маніпулятора залежить не тільки від
вигляду і числа кінематичних пар, але
і від їхнього розташування.
На рис. 20 наведений приклад маніпулятора з маневреністю, рівної 1.
Рис.20
3. Робітничим обсягом маніпулятора називають обсяг, обмежений поверхнею, яка огибає всі можливі положення охоплення.
Для маніпулятора, зображеного на рис. 20, це сфера радіусом r1. Робітничий обсяг характеризує найбільші габаритні розміри маніпулятора.
4. Робітничою зоною або зоною обслуговування називають частину робітничого обсягу, у якому можна виконувати операції з об'єктом маніпулювання. Для маніпулятора, зображеного на рис. 20, це тор (рис. 21).
Р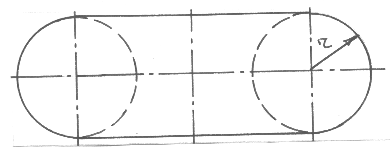 ис.
21
ис.
21
Маніпулятор з поступальними кінематичними парами має робітничу зону у вигляді прямокутного параллелепіпеда.
5. Швидкість руху охоплення і окремих ланок маніпулятора.
Максимальна швидкість руху визначається не тільки вдачею робітничого процесу і потужністю приводів, але і умовами безпеки для обслуговуючого персоналу.
6. Кут сервісу , всередині якого охоплення може підійти до заданої точки.
Максимальне значення куту сервісу max = 4 стерадиан.
7. Коефіцієнт сервіса - це відношення куту до його максимального значення.
= / (4); 0 1.
8. Точність позиціювання - це відстань, на яку відхиляється схоп при праці від заданих координат точки. Зараз ця точність дуже висока і має величину у мікрометрах. Відомі і інші характеристики ПР: енергетичні витрати, вантажопідйомність та інші.
1.3.8. Класифікація ПР
Класифікують ПР по різноманітним ознакам. Ми вже познайомились з досить поширеною інформацією по ПР, тому класифікувати їх буде досить легко.
По признаку спеціалізації. Це спеціалізовані (або ті, що виконують одну технологічну операцію) і універсальні (або ті, що працюють з групою технологічного обладнання).
По типу технологічної операції: основні і допоміжні.
По можливості пересування: стаціонарні і рухомі.
По вигляду приводу: з електромеханічним, гідравлічним, пневматичним приводом.
По вигляду СП ПР: з цикловим, позиціоним і контурним управлінням.
По засобу настанови на робітничому місці: напольні, подвісні, вбудовані.
По вантажопідйомності: легкі, середні, важкі.
По числу мір рухомості.
9. По вигляду системи координат.
З признаками по п. п. 8 і 9 ми познайомимся в найближчих розділах курсу.