

Кулісні механізми застосовують в строгальних верстатах, поршневих насосах і приладах.
Кулісою звичайно називають ланку з пазом, по якому переміщається повзун (кулісний камінь). Куліса може бути гойдаючуюся, що обертається, рухається поступально.
На рис. 12 наведена схема гидроприводу, в якому циліндр з поршнем замінює кулісний камінь.

Рис. 12
Зубчасті механізми часто використовуються у механізмах і призначені для здійснення потрібного обертального руху.
Найчастіше потрібний рух дістають внаслідок перетворення обертального руху з якоюсь кутовою швидкістю в обертальний рух з іншою кутовою швидкістю.
Механізми, що обслуговують обертальний рух, називають передачами. Тому зубчасті механізми, поряд с пасовими, фрикційними, ланцюговими та іншими належать до передач.
Досить поширені не лише плоскі, а й просторові зубчасті механізми. Ось ведучого і веденого валів зубчастих механізмів можуть бути паралельними, пересічними і перехресними у просторі.
Два циліндричних зубчастих колеса, що передають рух з одного вала на паралельний йому інший вал, можуть утворювати зовнішнє і внутрішнє зачеплення.
На рис. 13. показано зубчасту передачу із зовнішнім зачепленням; вона складається з коліс 1 і 2 та стояка 3.
Рис.13
Поряд із зубчастими механізмами, колеса яких обертаються навколо нерухомих осей, широко застосовують також механізми з валами, підшипники яких встановлено на рухомій рамі (водилі). При цьому зубчасті колеса беруть участь у складному русі, обертаючись не тільки відносно водила, а й разом с ним.
Такі механізми, залежно від числа ведучих ланок називають диференціальними або планетарними. Характерною особливістю диференціальних механізмів є наявність двох чи більше ведучих ланок, а планетарних однієї ведучої ланки і нерухомого зубчастого колеса, яке називають сонячним. За допомогою диференціальних механізмів (диференціалів) можна здійснювати алгебраїчне додавання кутових швидкостей, а тому їх можна використовувати у верстатах, автомобілях і т.п.
До зубчастих механізмів належать також зірчасті, або цівкові, мальтійські хрести, храпові.
Кулачкові механізми використовують у багатьох машинах і приладах, особливо ву машинах-автоматах, двигунах внутрішнього згоряння, парових машинах і турбiнах, текстильних і поліграфічних машинах.
|
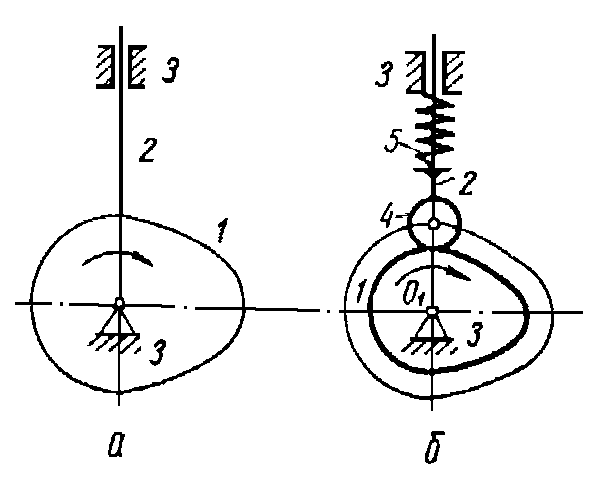
Рис.14 |
Розглянемо механiзм, що складається з кулачка 1, штовхача 2 і стояка 3 (рис.14, а). Щоб запобігти швидкому спрацюванню бічної поверхні кулачка, на кінці штовхача встановлюють ролік 4 (рис.14, б), який з’єднується з штовхачем на шарнірі, а для замикання елементів вищої кінематичної пари встановлюють пружину 5, яку не0вважають за ланку механізму і не враховують при підрахунку числа ступенів вільності.
|
На рис.15показано схеми найчастiше застосовуваних кулачкових механізмiв. Один з таких механізмiв, зображений нарис.15, є просторовим, решта - плоскі. Тут позначено ведучу ланку 1, ведену (штовхач) 2 і стояк 3.
Ступінь вільності розглядуваних кулачкових механізмiв можна визначити за відповідною структурною формулою. Найчастіше ступінь рухомостi кулачкових механізмів визначають за структурною формулою Чебишева; звичайно він дорiвнює одиницi. Тому при заданому русі ведучої ланки (кулачка) рух решти рухомих ланок буде цілком визначений.
Частіше застосовують кулачковi механізми з обертовим кулачком (рис. 15, а, д), рідше - з кулачком, що рухається поступально (рис.15, б).
Ведена ланка кулачкового механізму може здійснювати поступальний рух (рис.15, а, б, в) або обертальний - (рис.15, д); дуже рідко - складний плоский.

Рис.15
За типом штовхача кулачкові механізми поділяють на механізми з гострокінцевим штовхачем (рис. 15, а), штовхачем, що має ролик (рис. 15, б, в), плоским (мал. 15, д) штовхачем. Найпоширеніші роликовi штовхачі, бо при цьому тертя ковзання між профiлем кулачка і штовхачем замінюється на тертя кочення, внаслідок чого знижуються втрати на тертя в кінематичних парах механізму і зменшується спрацювання профілю кулачка.
Розглянемо найважливіші означення, що зустрічаються під час аналізу і синтезу кулачкових механізмів. Нарис.16 прийнято такі позначення:
в- фазовий кут віддалення (піднімання);
в.п- фазовий кут верхньої паузи;
наб- кут наближення (опускання);
н.п.- кут нижньої паузи;
R0- радіус основної шайби теоретичного профілю кулачка;
г0- радіус основноі шайби справжнього (робочого) профілю кулачка;
- радіус-вектор теоретичного профілю кулачка;
гp- радіус ролика;
h - хiд штовхача.
Дійсним (робочим) профілем кулачка називають профіль, з яким стикається ролик.
У розглядуваному випадку за теоретичний профіль узято траєкторію центра ролика у відносному русі штовхача відносно кулачка. Для механiзму із штовхачем, що має ролик, теоретичний профіль є еквідистантний (рiвновiддалений по нормалi) відносно дійсного.
Радіус-вектор теоретичного профілю завжди дорівнює за модулем відстані вiд осі обертання до вiдповідної радiус-вектору точки теоретичного профілю.
Інтервалам часу віддалення і наближення веденої ланки відповідають ті ділянки теоретичного профілю, на яких радіус-вектор дістає додатний або від'ємний приріст. Інтервалам верхньої і нижньої пауз відповідають ділянки профілю, на яких радіус-вектори сталі величини.
Фазові кути віддалення, верхньої паузи, наближення (повернення) і нижньої
паузи пропорціональнi вiдповідним інтервалам часу.
Тривалість різних циклів руху веденої ланки в часi або за кутом повороту кулачка можна показати на схемі (циклограмі). На поданій нижче циклограмі кожний з чотирьох фазових кутів (кутiв повороту кулачка, що відповідають певним циклам роботи механізму) дорівнює 90.

Рис.16
Сума фазових кутів дорівнює 360:
в+в.п.+наб+н.п.= 360. (87)
Відповідні інтервали часу пропорціональні фазовим кутам:
tв+ tв.п.+ tнаб+ tн.п.= T, (88)
090180270360
|
Ланка |
Фазовий кут | |||
|
Кулачок
|
в. |
в.п. |
наб |
н.п. |
|
Штовхач |
Віддалення |
Верхня пауза |
Наближення |
Нижня пауза |
де tв.- час що відповідає віддаленню штовхача;
tв.п.- тривалість верхньої паузи;
tнаб- час наближення;
tн.п.- тривалість нижньої паузи;
T - період руху механізму.