

16. Геометрическая интерпретация задачи линейного программирования
Область доступных решений ЗЛП в стандартной форме образуется перечислением m множеств. Каждое из них определяется соответствующим неравенством
ai1x1+…+
ainxn
bi
, i=![]() (1)
(1)
и представляет собой полупространство, лежащее по одну сторону от гиперплоскости
ai1x1+…+
ainxn
= bi
, i=![]() (2)
(2)
Пересечение указанных полупространств является многогранником, который и будет областью допустимых решений задачи и обозначается как X.
Линии уровня минимизируемой функции
z = с1x1+…+cnxn = const (3)
образуют семейство параллельных плоскостей. Вектор нормали к этим плоскостям
c = {c1, c2, …, cn}T
определяет направления возрастания нулевой функции z, а противоположный вектор –с определяет направление убывания функции z.
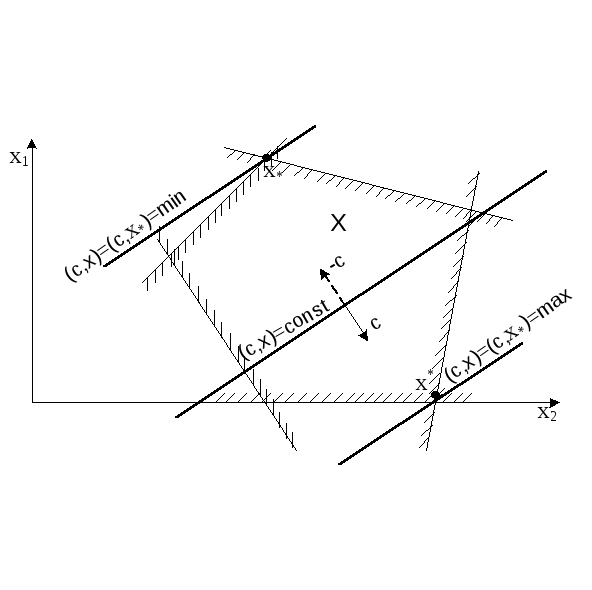
Рис 16.1. Геометрическая интерпретация ЗЛП в стандартной форме
Выберем из семейства (3) любую плоскость, пересекающую многогранник допустимых решений X, и будем смещать ее в направлении с, если решается задача максимизации целевой функции z, и в направлении -с , если решается задача минимизации. Будем смещать эту плоскость до такого предельного положения, когда многогранник X окажется весь по одну сторону от неё и хотя бы одна их точек X все еще будет принадлежать нашей плоскости. Эти точки, или точка, лежащие на плоскости и будут решением задачи минимизации целевой функции z, и x* решением, соответственно, задачи максимизации функции z (рис. 16.1).
Заметим, что множество точек, удовлетворяющих неравенству (1), т.е. множество допустимых решений X, может быть пустым, ограниченным и неограниченным. В первом случае задача не имеет решения.
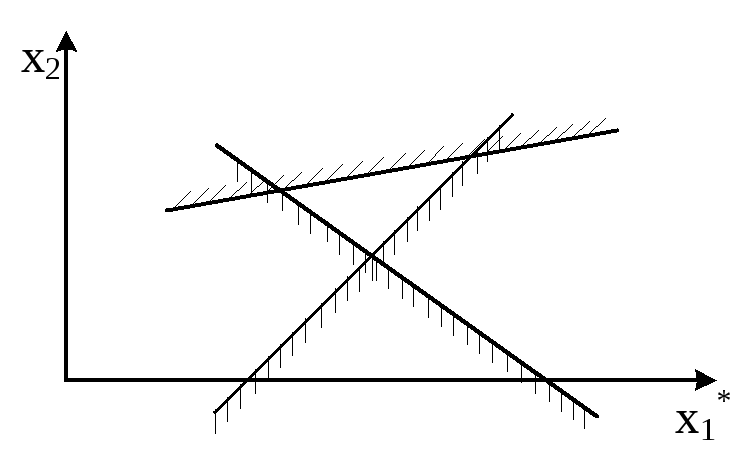
Рис.16.2 Пример пустой области допустимых решений (X)
Во втором случае ЗЛП заведомо разрешима и имеет либо единственное решение (рис.16.1), совпадающее с одной из вершин допустимого многогранника X, либо бесконечное множество решений (рис.16.3) – ребро или грань многогранника, параллельные плоскостям семейства (3).
Решения x*
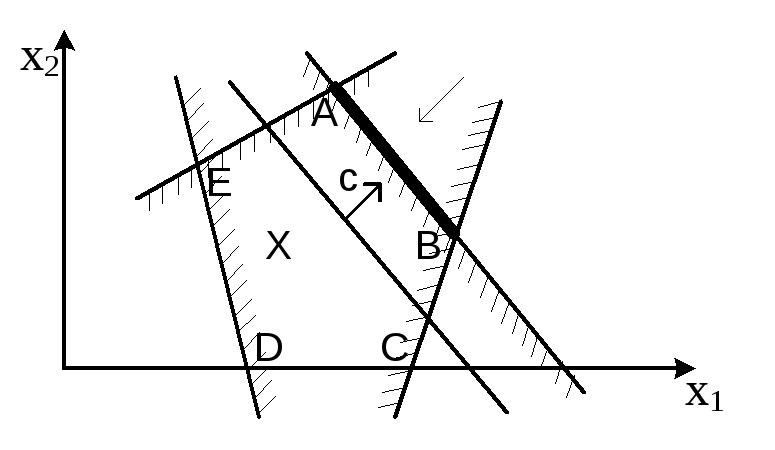
Рис.16.3. Пример ЗЛП, имеющий бесконечное множество решений (ребро АВ многогранника допустимых решений ABCDE)
Если допустимое множество решений ЗЛП неограниченно, ответ на вопрос о существовании ее решения для задачи максимизации зависит от того, ограничена сверху на этом множестве целевая функция z или нет. Если ограничена, задача разрешима, причем возможны те же ситуации, что и во втором из рассмотренных выше случаев. Если нет – решение отсутствует (рис. 16.4). Для задачи минимизации, в случае неограниченного множества допустимых решений X, ответ на вопрос о существовании решения ЗЛП
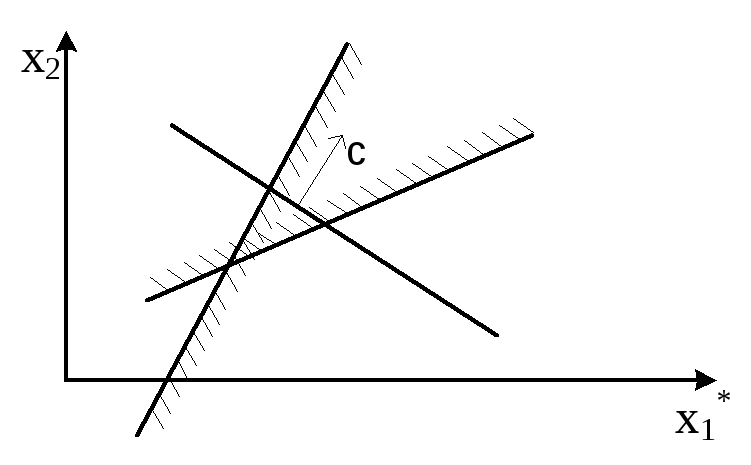
Рис. 16.4. Пример ЗЛП, имеющей неограниченное множество допустимых решений.
зависит от того, ограничена снизу на множестве X целевая функция z или нет. Возникающие ситуации те же что и у задач максимизации.