

Кинематика абсолютно твердого тела
Перейдём к рассмотрению движения абсолютно твёрдого тела (АТТ). Твёрдое тело состоит из бесконечного числа точек, однако, как будет показано позднее, для описания движения АТТ нет необходимости задавать движение каждой его точки.
Поступательное движение твёрдого тела
Рассмотрим вначале простые случаи движения – поступательное движение твёрдого тела и вращение твёрдого тела.
П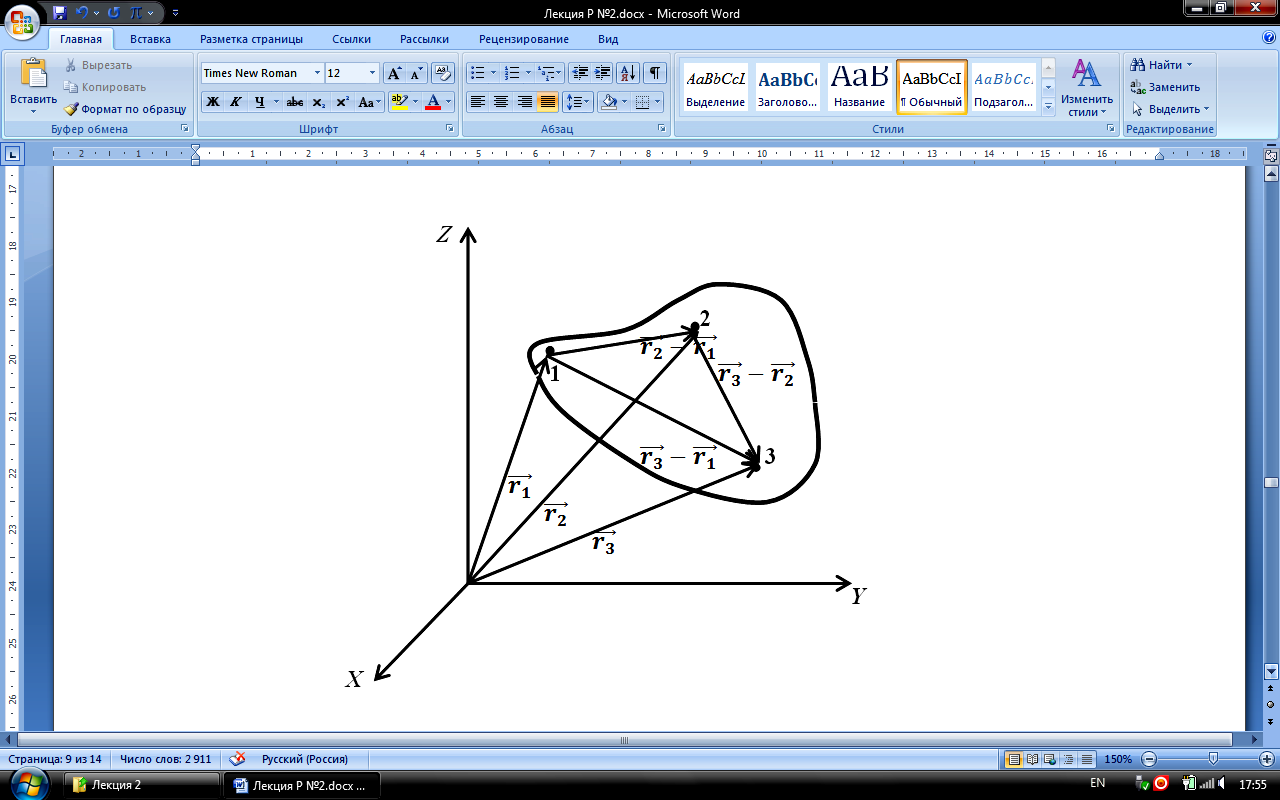 ростейшим
видом движения твёрдого тела является
такое движение, при котором векторы
скорости трёх его точек, не лежащих на
одной прямой, равны между собой в каждый
момент времени. Определим положение
этих точек в некоторый момент времени
радиус-векторами:
ростейшим
видом движения твёрдого тела является
такое движение, при котором векторы
скорости трёх его точек, не лежащих на
одной прямой, равны между собой в каждый
момент времени. Определим положение
этих точек в некоторый момент времени
радиус-векторами:![]()
![]()
Отсюда:
![]()
Следовательно, векторы
![]()
![]() не
зависят от времени и, следовательно,
перемещаются в пространстве, оставаясь
параллельными сами себе. Три точки
твёрдого тела определяют систему
координат, жёстко связанную с твёрдым
телом. В рассматриваемом случае движение
будет таким, что оси будут перемещаться,
оставаясь параллельными сами себе. Но
это означает, чтолюбая
прямая, проведённая в твёрдом теле,
остаётся в процессе движения параллельной
самой себе.Такое
движение называется поступательным(например, движение кабины в аттракционе
«колесо обозрения»).
не
зависят от времени и, следовательно,
перемещаются в пространстве, оставаясь
параллельными сами себе. Три точки
твёрдого тела определяют систему
координат, жёстко связанную с твёрдым
телом. В рассматриваемом случае движение
будет таким, что оси будут перемещаться,
оставаясь параллельными сами себе. Но
это означает, чтолюбая
прямая, проведённая в твёрдом теле,
остаётся в процессе движения параллельной
самой себе.Такое
движение называется поступательным(например, движение кабины в аттракционе
«колесо обозрения»).
В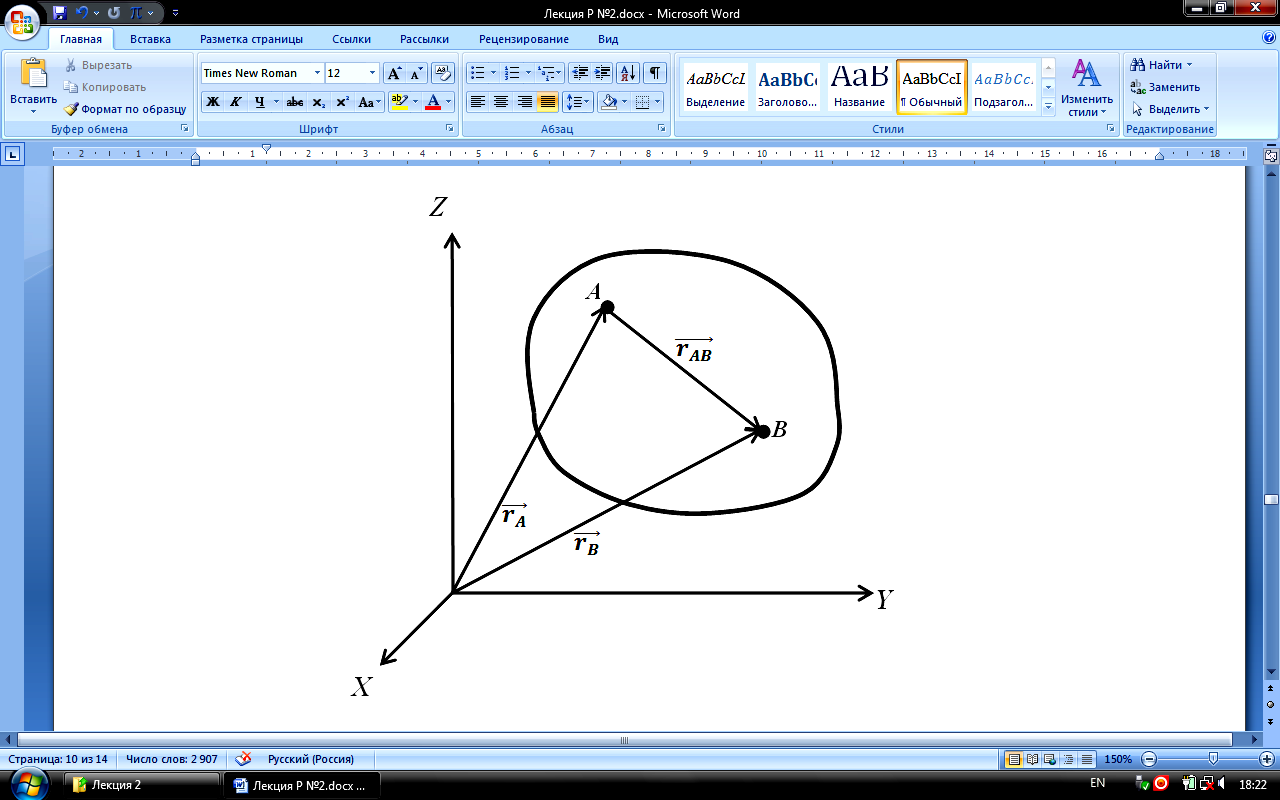 ыберем
в твёрдом теле, движущимся поступательно,
две произвольные точки А и В.
ыберем
в твёрдом теле, движущимся поступательно,
две произвольные точки А и В.
![]()
При поступательном движении АТТ![]() =const.
=const.
 (1.29)
(1.29)
Поскольку
![]() то
(1.29) примет вид:
то
(1.29) примет вид:![]() (1.30)
(1.30)
Точки А и В выбраны произвольно. Следовательно: при поступательном движении все точки твёрдого тела имеют в каждый данный момент времени одинаковые векторы скорости.
Продифференцировав по времени уравнение
(1.30) получим:![]() .
Или, учитывая определение ускорения
точки (1.13):
.
Или, учитывая определение ускорения
точки (1.13):
![]() (1.31)
(1.31)
Точки А и В выбраны произвольно. Следовательно: точки твёрдого тела, движущегося поступательно, имеют в каждый данный момент времени одинаковые ускорения.
Т.к.
![]() ,
траектории точек А и В являются
конгруэнтными, т.е. их можно совместить
друг с другом при наложении. Таким
образом,траектории,
описываемые точками твёрдого тела,
движущегося поступательно, одинаковы
и одинаково расположены.
,
траектории точек А и В являются
конгруэнтными, т.е. их можно совместить
друг с другом при наложении. Таким
образом,траектории,
описываемые точками твёрдого тела,
движущегося поступательно, одинаковы
и одинаково расположены.
Из полученных результатов следует сделать вывод: для описания поступательного движения твёрдого тела достаточно задать движение лишь одной его точки.
Вращение твердого тела
Вращением твёрдого тела называется такой вид движения, при котором, по крайней мере, одна точка твёрдого тела остаётся неподвижной. Рассмотрим, однако, более простой случай – вращение АТТ вокруг неподвижной оси.
Вращение абсолютно твёрдого тела вокруг неподвижной оси
Закрепим две точки АТТ:![]() .
Рассмотрим, как будут двигаться все
точки твёрдого тела и научимся определять
скорости и ускорения этих точек. Ясно,
что точки твёрдого тела, лежащие на
прямой, проходящей через две закреплённые
точки, двигаться не будут: эту прямую
называют неподвижнойосью
вращения. Движение твёрдого тела,
при котором по крайней мере две его
точки неподвижны, называют вращением
АТТ вокруг неподвижной оси.
.
Рассмотрим, как будут двигаться все
точки твёрдого тела и научимся определять
скорости и ускорения этих точек. Ясно,
что точки твёрдого тела, лежащие на
прямой, проходящей через две закреплённые
точки, двигаться не будут: эту прямую
называют неподвижнойосью
вращения. Движение твёрдого тела,
при котором по крайней мере две его
точки неподвижны, называют вращением
АТТ вокруг неподвижной оси.
Ясно, что точки не лежащие на оси вращения описывают окружности, центры которых лежат на оси вращения. Плоскости, в которых лежат такие окружности, перпендикулярны оси вращения. Следовательно: нам известны траектории всех точек тела. Это позволяет приступить к нахождению скорости любой точки твёрдого тела.
При естественном способе задания движения точки:
![]() (1.32)
(1.32)
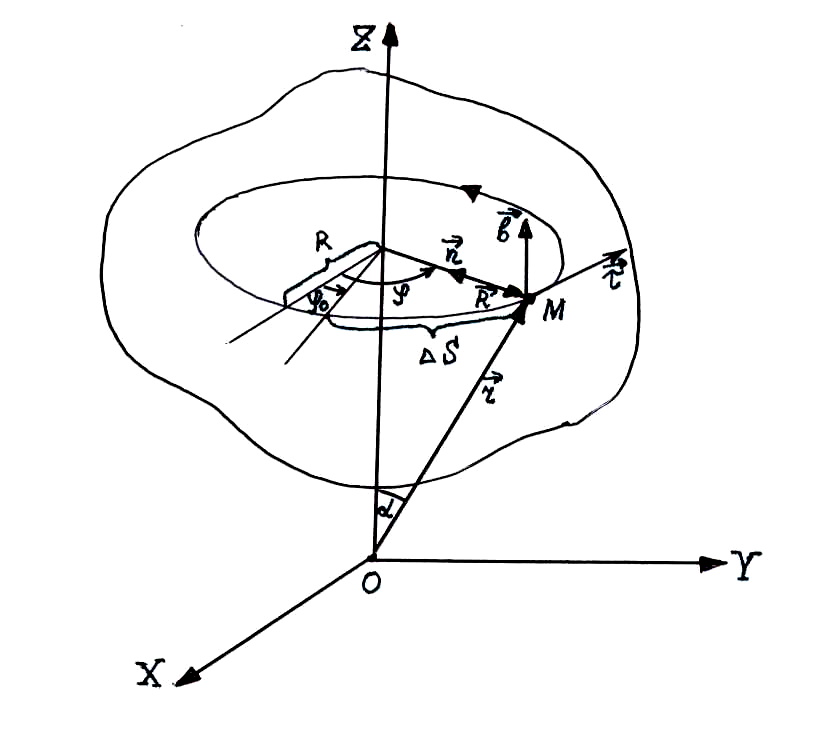 Выберем
неподвижную систему отсчёта, ось0Zкоторой совпадает с осью вращения. Угол
между неподвижной плоскостьюX0Z,
проходящей через ось вращения и
плоскостью, жёстко связанной с твёрдым
телом и проходящей через ось вращения,
обозначим через
Выберем
неподвижную систему отсчёта, ось0Zкоторой совпадает с осью вращения. Угол
между неподвижной плоскостьюX0Z,
проходящей через ось вращения и
плоскостью, жёстко связанной с твёрдым
телом и проходящей через ось вращения,
обозначим через![]() .
В начальный момент времени
.
В начальный момент времени![]() .
Рассмотрим движение точки М по окружности
радиусаR.
.
Рассмотрим движение точки М по окружности
радиусаR.
![]() ;
;![]() ;
;![]() .
.
Продифференцируем по времени полученное
уравнения, учитывая, что величины R,S0и![]() являются постоянными:
являются постоянными:
![]() (1.33)
(1.33)
Подставив (1.33) в (1.32) получим:
![]() (1.34)
(1.34)
Эта формула неудобна, потому что сюда
входит единичный вектор
![]() ,
который зависит от положения точки. Мы
привыкли положение точки задавать
радиус-вектором
,
который зависит от положения точки. Мы
привыкли положение точки задавать
радиус-вектором![]() .
Он должен входить в формулу для скорости.
Для этого проведём следующие преобразования:
.
Он должен входить в формулу для скорости.
Для этого проведём следующие преобразования:
используя, что
![]() ,
перепишем соотношение (1.34) в виде
,
перепишем соотношение (1.34) в виде
![]() (1.35)
(1.35)
Обозначим:
![]() – не зависит от выбора рассматриваемой
точки М; (1.36)
– не зависит от выбора рассматриваемой
точки М; (1.36)
![]() – вектор, проведенный из центра окружности
к точке М. (1.37)
– вектор, проведенный из центра окружности
к точке М. (1.37)
Ясно, что модуль
![]() равен радиусу окружности.
равен радиусу окружности.
Подставим (1.36) и (1.37) в (1.35):
![]() (1.38)
(1.38)
Докажем, что
![]() (1.39)
(1.39)

Направления![]() совпадают с направлением единичного
вектора касания
совпадают с направлением единичного
вектора касания![]() .
.
Следовательно: тождество (1.39) справедливо. Осуществив замену (1.39) уравнение (1.38) запишем в виде:
![]() –
линейная скорость точки М. (1.40)
–
линейная скорость точки М. (1.40)
![]() – угловая скорость. (1.41)
– угловая скорость. (1.41)
Угловая скорость – величина одинаковая для всех точек твердого тела.
Линейная скорость любой точки твёрдого
тела, вращающегося вокруг неподвижной
оси, равна векторному произведению
угловой скорости АТТ на радиус-вектор,
проведённый из произвольной точки оси
вращения, разложим
![]() по ортам:
по ортам:
![]() . (1.42)
. (1.42)
Сравнивая (1.42) и (1.41) получим:
![]() ;
;
модуль
![]()
Модуль угловой скорости
![]() связан с частотой вращения
связан с частотой вращения![]() абсолютно
твердого тела:
абсолютно
твердого тела:
![]()
При вращении тела его угловая скорость может изменяться, необходимо уметь определить угловую скорость тела в любой момент времени. Для этого введена величина, которая характеризует изменение угловой скорости с течением времени. Эту величину называют угловым ускорением.
Дадим определение углового ускорения.
Пусть в момент времени tугловая скорость![]() .
А в момент времениt+∆tугловая скорость равна
.
А в момент времениt+∆tугловая скорость равна![]() .
Составим отношение изменения угловой
скорости к промежутку времени, в течение
которого это изменение происходит, и
найдём предел этого отношения при∆t→ 0. В механике этот предел называютугловым ускорением телаи обозначают
.
Составим отношение изменения угловой
скорости к промежутку времени, в течение
которого это изменение происходит, и
найдём предел этого отношения при∆t→ 0. В механике этот предел называютугловым ускорением телаи обозначают![]() поэтому:
поэтому:![]() .
Угловое ускорение – величина одинаковая
для всех точек твердого тела. Единицей
измерения углового ускорения является
.
Угловое ускорение – величина одинаковая
для всех точек твердого тела. Единицей
измерения углового ускорения является![]() .
.
Используя (1.40) определим линейное ускорение точки М:
![]() .
.
Для углового ускорения, его проекции на ось 0Z, модуля углового ускорения справедливы соотношения:

![]()
(1.43)
![]()
Перепишем выражение для ускорения точки:
![]() (1.44)
(1.44)
![]()
Тангенциальное ускорение любой точки твёрдого тела, вращающегося вокруг неподвижной оси, равно векторному произведению углового ускорения тела на радиус – вектор этой точки, проведённой из произвольной точки оси вращения.