

Расчет мощности электродвигателя главного движения
Привод главного движения продольно-строгального станка работает в перемежающемся режиме с частыми реверсами (S7). Исходными данными для определения предварительной мощности электродвигателя и построения нагрузочной диаграммы являются:
Наибольшие составляющие усилия резания, горизонтальная Fz.макс и вертикальная Fy, Н;
Наибольшая скорость прямого хода стола Vпр и обратного хода Vобр.макс, м/мин;
Наибольший вес обрабатываемой детали Gg и стола Ge, Н;
Кпд передачи (до рейки стола) при полной нагрузке, η;
Длина хода стола L, и коэффициент трения стола о направляющие μ (принимается равным 0,005...0,08);
Суммарный момент инерции вращающихся и поступательно движущихся частей механизма привода и стола с деталью.
Расчет мощности и выбор двигателя станка начинается с определения максимального тягового усилия, соответствующего наиболее тяжелому режиму работы.
Мощность на валу электродвигателя находится по формуле:
![]() (27.10)
(27.10)
Предварительный выбор мощности производится с учетом способа регулирования скорости. При однозонном регулировании с постоянным моментом
![]() (27.11)
(27.11)
Номинальная скорость вращения двигателя определяется из выражения
![]() .
(27.12)
.
(27.12)
где:
![]() - радиус приведения скорости стола к
валу двигателя.
- радиус приведения скорости стола к
валу двигателя.
При
двухзонном регулировании, предварительно
задаются диапазоном регулирования
скорости изменением потока двигателя.
![]() ,
затем определяют расчетное значение
скорости
,
затем определяют расчетное значение
скорости
![]() .
(27.13)
.
(27.13)
Мощность электродвигателя варьируют, исходя из соотношения
![]() .
(27.14)
.
(27.14)
Отсюда следует, что использование мощности двигателя при двухзонном регулировании более полное. Например, при Dф.расч=2, установленная мощность двигателя при однозонном регулировании будет в два раза больше, чем при двухзонном.
После выбора электродвигателя для проверки его на нагрев и перегрузочную способность строят тахограмму и нагрузочную диаграмму электропривода, которые включают (рис.27.2) несколько участков.
Разгон и торможение электродвигатели могут осуществляться скачкообразным изменением уставки скорости. При этом ускорение определяется узлом ограничения тока или задатчиком интенсивности. На рис.27.2 показано построение нагрузочной диаграммы при ограничении тока.
Работа
станка начинается с разгона стола с
обрабатываемой деталью до скорости V1
(время t1).
При этом двигатель развивает максимально
допустимый момент М1=Ммакс.
Момент нагрузки в этом режиме равен
Мс2,
соответствующим усилию
![]() ,
гдеGc,
Gg
вес стола и детали соответственно. Резец
входит в деталь на установившейся
скорости ω1
(время t2).
На участке t2
скорость стола и двигателя ω1=const.
Горизонтальные участки пониженной
скорости в тахограмме привода при входе
резца в деталь и выходе его из детали
не является обязательными [4-29]. Скорость
при врезании не должна превосходить
заданного по условиям технологии
значения.
,
гдеGc,
Gg
вес стола и детали соответственно. Резец
входит в деталь на установившейся
скорости ω1
(время t2).
На участке t2
скорость стола и двигателя ω1=const.
Горизонтальные участки пониженной
скорости в тахограмме привода при входе
резца в деталь и выходе его из детали
не является обязательными [4-29]. Скорость
при врезании не должна превосходить
заданного по условиям технологии
значения.
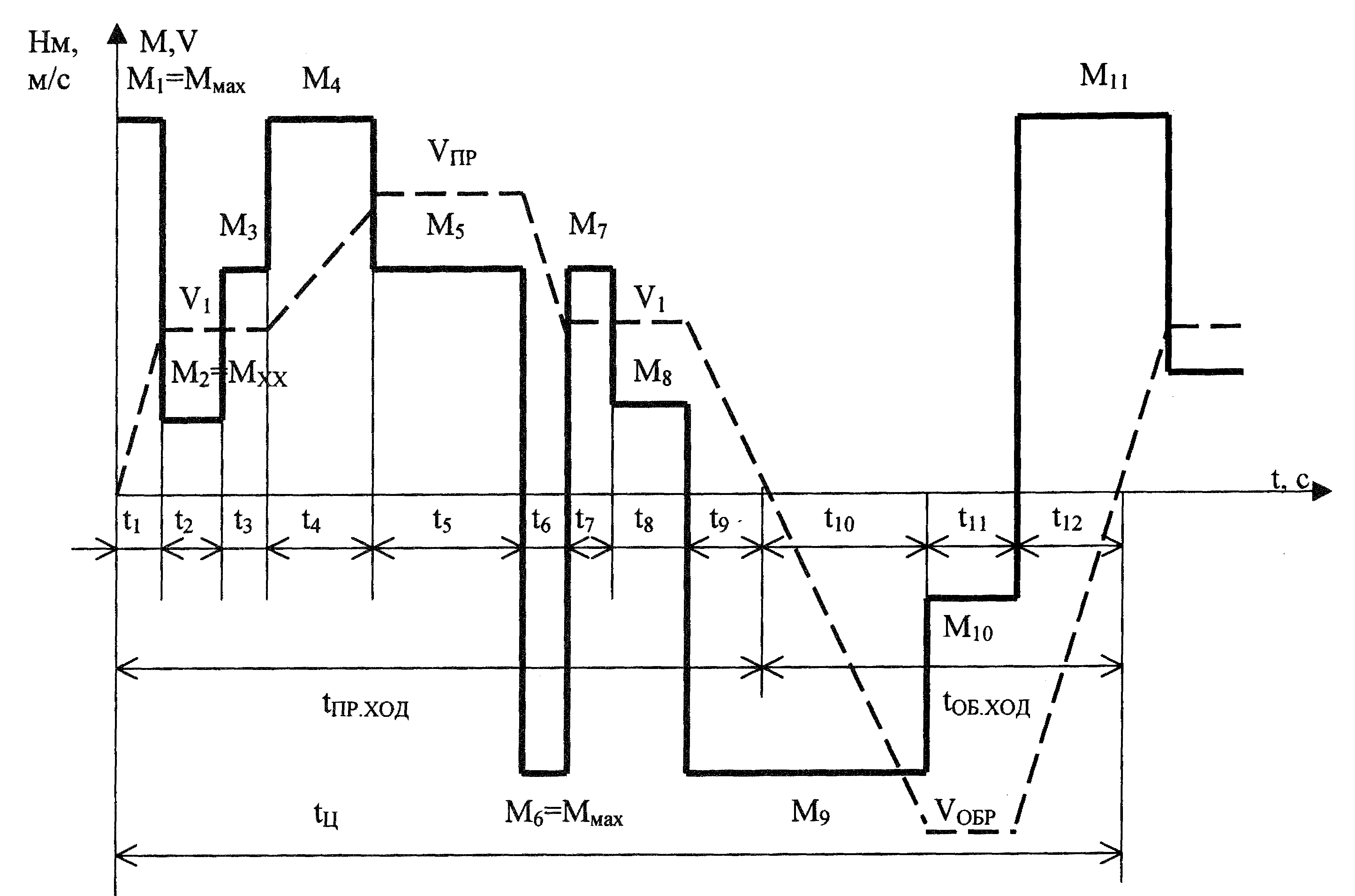
Рис.27.2. Нагрузочная диаграмма и тахограмма прямого и обратного хода электропривода главного движения продольно-строгального станка
На
участке t3
усилие
![]() ,
а моментМ3
соответствует усилию F3,
резец находится в соприкосновении с
деталью. Далее стол разгоняется до
скорости Vпр(ωпр)
под действием
момента Мдин=Ммакс-М3,
который существенно меньше динамического
момента при разгоне стола до сопрокосновения
резца с деталью (время t1).
На участке t5
имеет место режим работы на установившейся
скорости, М5=М3.
На участке t6
осуществляется торможение привода
стола до скорости V1(ω1),
на которой резец выходит из детали. При
торможении двигатель развивает
максимальный момент М6=Ммакс.
На участке t7
стол двигается в прямом направлении со
скоростью V1(ω1),
на которой резец выходит из детали.
Затем осуществляется реверс привода.
Скорость движения стола в противоположном
направлении Vобр
выбирается в 2...3 раза большей [4-9], чем в
прямом направлении. Разгон станка и его
торможение производится при моменте
Ммакс
двигателя. Усилие на участках обратного
хода обусловлено только трением в
направляющих
,
а моментМ3
соответствует усилию F3,
резец находится в соприкосновении с
деталью. Далее стол разгоняется до
скорости Vпр(ωпр)
под действием
момента Мдин=Ммакс-М3,
который существенно меньше динамического
момента при разгоне стола до сопрокосновения
резца с деталью (время t1).
На участке t5
имеет место режим работы на установившейся
скорости, М5=М3.
На участке t6
осуществляется торможение привода
стола до скорости V1(ω1),
на которой резец выходит из детали. При
торможении двигатель развивает
максимальный момент М6=Ммакс.
На участке t7
стол двигается в прямом направлении со
скоростью V1(ω1),
на которой резец выходит из детали.
Затем осуществляется реверс привода.
Скорость движения стола в противоположном
направлении Vобр
выбирается в 2...3 раза большей [4-9], чем в
прямом направлении. Разгон станка и его
торможение производится при моменте
Ммакс
двигателя. Усилие на участках обратного
хода обусловлено только трением в
направляющих
![]() .
По окончании обратного хода дается
команда на разгон электродвигателя в
прямом направлении.
.
По окончании обратного хода дается
команда на разгон электродвигателя в
прямом направлении.
При пуске электродвигателя под контролем задатчика интенсивности нагрузочная диаграмма для прямого хода стола примет вид, представленный на рис.27.3. Здесь ускорение при движении стола без соприкосновении резца с деталью и при соприкосновении не изменяется, а момент двигателя изменяется за счет изменения момента сопротивления движению.
Рис.27.4.
Упрощенная нагрузочная диаграмма
продольно-строгального станка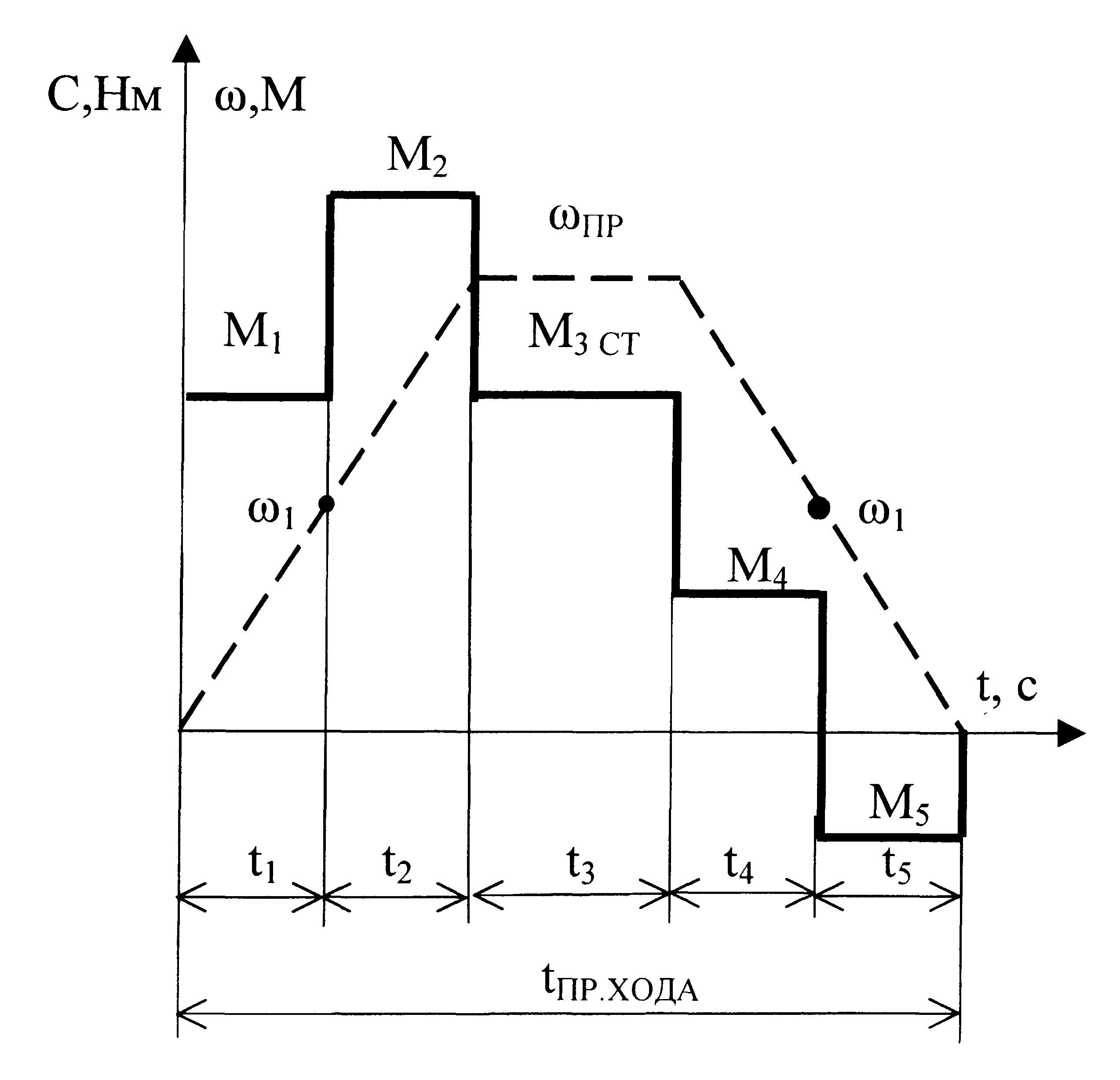
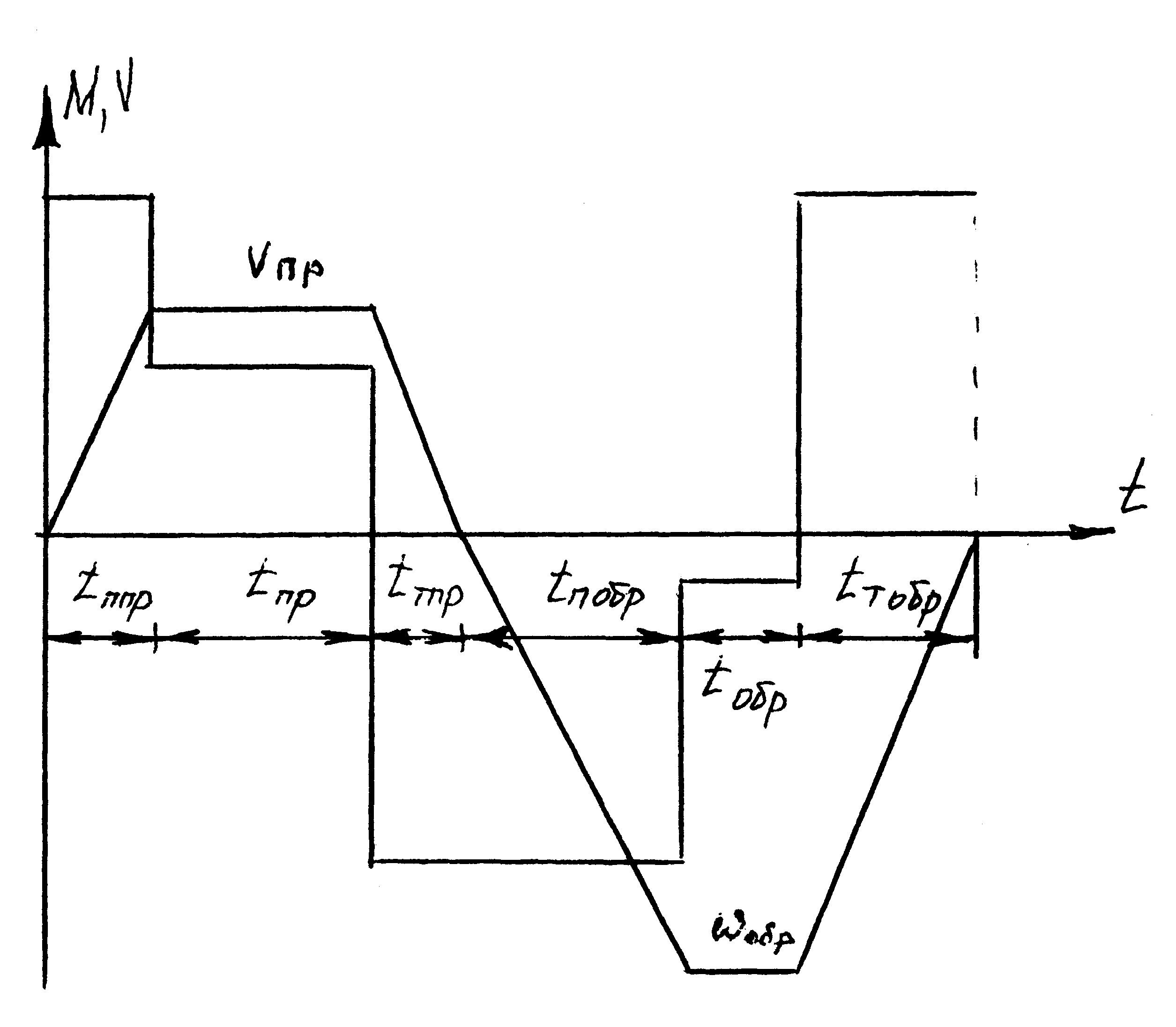
Рис.27.3.
Нагрузочная диаграмма и тахограмма
прямого хода электропривода главного
движения продольно-строгального станка
при пуске и торможении под контролем
задатчика интенсивности
Для проверки на нагрев предварительного выбранного электродвигателя при его работе с ограничением тормозного тока, и однозонном регулировании скорости используют приближенную нагрузочную диаграмму электропривода (рис.27.4) [4-30]. Эта нагрузочная диаграмма строится, исходя из следующих допущений: не учитывается понижение скорости стола при врезании резца и выходе его из детали; прямой ход стола производится при номинальной мощности резания со скоростью Vпр; разгон и торможение производится при холостом ходе под действием Мп=Мт=Мдв.макс. Затем, с учетом того, что двигатель имеет независимую вентиляцию, определяют эквивалентный момент по формуле:
 (27.15)
(27.15)
где: Мп, Мт.обр, Мрев – пусковой, тормозной и реверсивный моменты двигателя, Мп=Мт.обр=Мрев=Ммакс; tп.пр, tрев, tпр, tобр, tт.обр, tц - время пуска при прямом ходе, время реверсирования, время установившегося движения при прямом ходе и обратном ходе, время торможения при обратном ходе, время цикла соответственно.
![]()
Время пуска и торможения при прямом ходе определяется из выражения
![]() ,
(27.16)
,
(27.16)
![]()
Время пуска и торможения при обратном ходе определяется также по формулам (27.16), но вместо скорости (Vпр)ωпр подставляется значение скорости ωобр(Vобр).
Время движения при прямом ходе определяется по формуле
![]() ,
(27.17)
,
(27.17)
а при обратном
![]() ,
(27.18)
,
(27.18)
где: L - длина обрабатываемой поверхности детали, м.
Предварительно выбранный двигатель будет удовлетворять условиям нагрева, если Мэкв≤Мном. В случае регулирования угловой скорости ослаблением поля двигателя нужно строить зависимость тока двигателя от времени и проверять его по методу эквивалентного тока.