

7.5. Параметры выходного сигнала фэп и его связь с температурой рабочих лопаток
Фотоэлектрический преобразователь преобразует пространственное распределение температуры по траектории визирования во временной электрический сигнал. В общем случае сигнал фотоэлектрического преобразователя (ФЭП) представлен на рис.7.9. В состав ФЭП входит кремниевый фотодиод, работающий в режиме короткого замыкания, предварительный усилитель, выполненный на операционном усилителе.
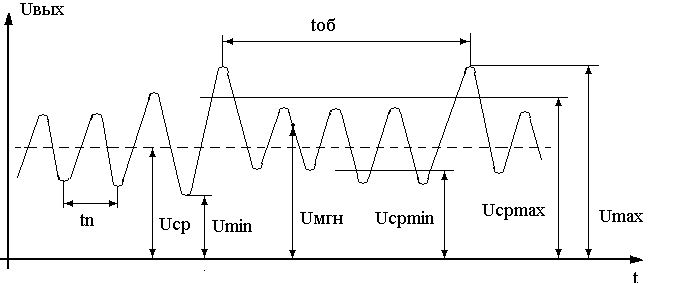
Рис.7.9. Выходной сигнал фотоэлектрического преобразователя
В случае отсутствия помех от несгоревших частиц топлива, выходной сигнал на установившемся режиме можно рассматривать как стационарный случайный сигнал. Из сигнала ФЭП можно выделить:
- максимальное значение сигнала, Umax, за время оборота ротора;
- минимальное значение, Umin, за время оборота ротора;
- среднемаксимальное значение, Uсрmax;
- среднеминимальное значение, Uсрmin;
- среднее значение переменной составляющей, Uср.
Введение специального синхронизирующего быстродействующего устройства позволяет измерять мгновенное значение сигнала в требуемый момент времени. Возможность использования информации о температурном состоянии турбины, содержащейся в сигнале пирометра, определяется, с одной стороны, установлением взаимосвязи измеряемых параметров сигнала пирометра с температурными оценками теплового состояния ротора, с другой стороны – разработкой простой и удобной в эксплуатации аппаратуры, обеспечивающей необходимую точность измерения параметров сигнала.
Рассмотрим взаимосвязь мгновенного значения выходного сигнала пирометра с определенными температурами.
Мгновенное значение сигнала ФЭП характеризуется кажущейся температурой участка поверхности лопатки, который в момент измерения находится в поле визирования фотоголовки. Ввиду конечных размеров пятна визирования фотоголовки, локальную температуру лопатки можно оценить только путем введения поправки, учитывающей конечный диаметр пятна. Измеряя аналогичным образом выходной сигнал ФЭП в момент времени, когда в поле визирования находится наиболее либо наименее нагретый участок лопатки, можно оценить максимальную температуру лопаток, Тmax л, минимальную температуру лопаток,Тmin л, температуру максимально нагретой лопатки, Тmax р.
Аппаратная реализация возможности измерения мгновенного значения сигнала ФЭП в любое заданное время позволяет с помощью дополнительных расчетов определять все температурные параметры рабочих лопаток.
Ранее было указано, что распределение температуры по траектории визирования и соответственно выходной сигнал ФЭП можно рассматривать как случайный стационарный процесс. Для оценки температурного состояния рабочих лопаток вероятностным методом необходима априорная информация о законе распределения температур между определенными лопатками и по самим лопаткам, доверительные интервалы и доверительная вероятность распределения. Эти параметры могут быть получены либо непосредственно в процессе измерения температуры лопаток, либо при контрольных стендовых испытаниях конкретного двигателя. В этом случае будут определены допустимые отклонения параметров температуры.
Определим связь максимального значения сигнала ФЭП, Umax, за время одного оборота с различными температурами.
При измерении за время одного оборота невозможно дать точную оценку температурного состояния отдельных лопаток и осредненной температуры всего ротора. Максимальное значение сигнала определяет лишь температуру максимально нагретой лопатки.
Среднемаксимальное значение сигнала ФЭП за время одного оборота наиболее полно характеризует тепловое состояние входных либо выходных кромок, в зависимости от места установки ФЭП. Для получения значения среднемаксимальной температуры ротора необходимо по измеренному параметру Uср max и передаточной характеристике ФЭП определить кажущуюся температуру и ввести поправку, учитывающую конечный диаметр пятна визирования.
Среднеминимальное значение сигнала, Uср min, характеризует среднеминимальную температуру ротора, Тср min. В этом случае также необходимо учитывать осреднение, вносимое конечным значением диаметра пятна визирования.
Среднее значение сигнала, Uср, позволяет дать оценку средней температуре всех лопаток, Тср. Осредненные параметры сигнала
Uср max, Uср min, Uср не могут дать количественной оценки температурного состояния локальных точек отдельных лопаток.
Одновременное измерение среднемаксимального и среднеминимального значения сигнала ФЭП позволяет определить Uср, а по нему – Тср.
Измерение Uср max и Uср дает оценку Uср min, соответственно
Тср min. Измерение Uср min и Uср позволяет определить Uср max и Тср max. В этом случае необходима специальная аппаратурная либо математическая обработка результатов измерения параметров сигнала.
Алгоритм обработки выбирается исходя из необходимой точности измерения, требуемого параметра рабочих лопаток, минимальной сложности аппаратуры, реализующей необходимое измерение для конкретного типа двигателя. Последовательно рассмотрим алгоритмы обработки сигнала ФЭП, позволяющие получить наиболее важные параметры температуры поверхности рабочих лопаток ГТД.
Для определения локальной температуры поверхности какой-либо лопатки, необходимо измерить мгновенное значение выходного сигнала ФЭП в момент времени, когда данный участок находится в поле зрения фотоголовки. В этом случае необходим сигнал о положении ротора турбины и устройство, реализующее измерение мгновенного значения сигнала. С помощью градуировочной характеристики определяем температуру, осредненную по пятну визирования - кажущуюся температуру:
![]()
![]() .
(7.11)
.
(7.11)
где Wг-1 – градуировочная характеристика.
Для получения локальной температуры требуется ввести поправку, учитывающую конечный диаметр пятна визирования ΔТα
Определение максимальной температуры наиболее перегретой лопатки ротора осуществляется измерением максимального значения выходного сигнала ФЭП за время одного оборота ротора турбины:
![]() .
(7.12)
.
(7.12)
Эту же величину можно получить, измеряя максимальную величину температуры каждой лопатки Тmax.л.i, выбрав самую перегретую.
Алгоритмы измерения осредненных значений температур лопаток по сигналу ФЭП сводятся к вычислению среднемаксимальной температуры:
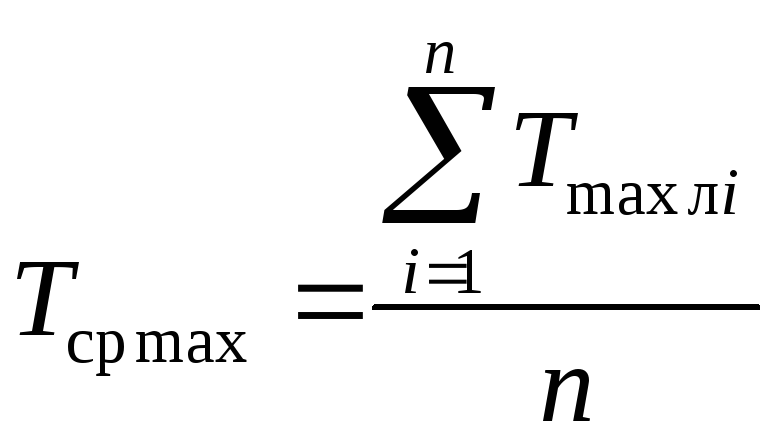 ,
(7.13)
,
(7.13)
и среднеминимальной температуры:
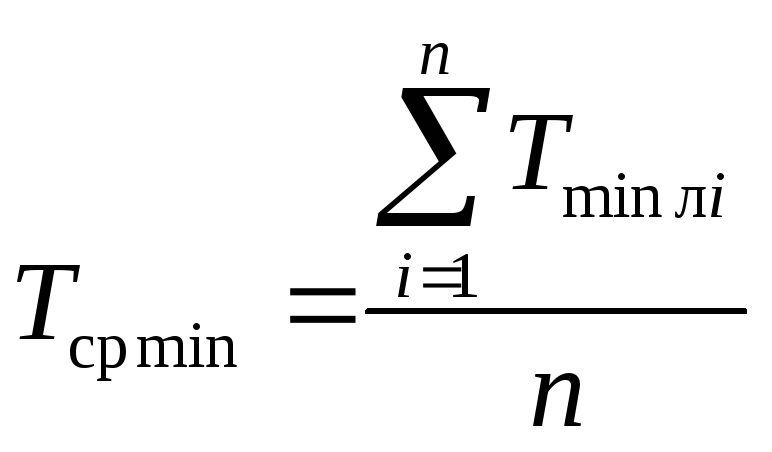 ,
(7.14)
,
(7.14)
где n-число лопаток
Оценка средних температур по осредненному значению параметра содержит погрешность, вносимую нелинейной градуировочной характеристикой ФЭП. Для устранения этой погрешности необходимо ввести дополнительную обработку сигнала ФЭП.
Рассмотренные выше алгоритмы содержат операции линеаризации и несложных математических вычислений. Реализация таких вычислений возможна аналоговыми устройствами, но при этом будут вноситься дополнительные погрешности, вызванные нестабильностью характеристик аналоговых устройств, зависимостью результатов от отдельных элементов, влиянием внешних факторов (пульсации напряжения питания, помехи и т.д.). Перечисленные недостатки отсутствуют в цифровых устройствах, в частности в микропроцессорах. Современные микропроцессоры и микро ЭВМ позволяют реализовывать данные вычисления с заранее заданной точностью.
Фотопирометрическая система измерения температуры лопаток ГТД представлена в виде структурной схемы на рис.7.10.
Объектом измерения являются рабочие лопатки ГТД. Тепловое излучение рабочей лопатки поступает на фотоэлектрический преобразователь (ФЭП), который преобразует его в электрический сигнал, функционально связанный с температурой поверхности. Фотоголовка ФЭП через систему линз фокусирует излучение пятна визирования с поверхности лопатки на фотодиод. Фототок фотодиода, пропорциональный температуре лопатки, поступает на предусилитель, который усиливает сигнал до необходимого уровня. В процессе измерения, при вращении двигателя, на вход ФЭП поступает информация со всех лопаток двигателя, так как пятно визирования проходит последовательно по всем лопаткам
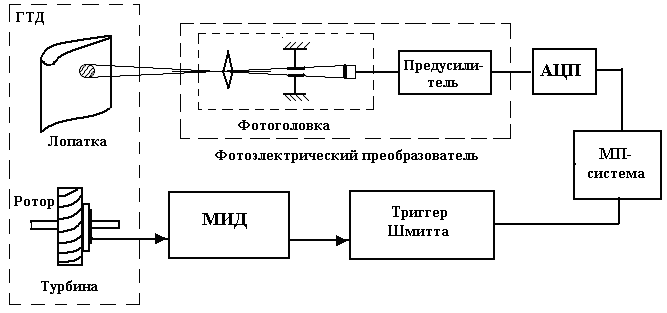
Рис.7.10.Структурная схема фотопирометра
Чтобы знать, в какой момент времени какая лопатка находится под пятном визирования ФЭП, необходимо получать информацию о положении ротора в текущий момент времени. Для этой цели служит датчик положения ротора, закрепленный на роторе двигателя и за один оборот турбины выдающий один импульс напряжения, который говорит о прохождении под пятном визирования условно первой лопатки двигателя. Таким образом, осуществляется привязка перемещения лопаток ГТД в пространстве ко времени. Магнитоиндукционный датчик (МИД) снимает сигнал с диска, а триггер Шмитта преобразует этот сигнал в прямоугольную форму, доступную для восприятия микропроцессорной (МП) системой.
Выходной сигнал ФЭП пропорциональный температуре лопаток поступает на АЦП, преобразуется в цифровой код и подается на вход МП системы. МП система производит математическую обработку сигнала с целью получения требуемых значений температуры рабочих лопаток ГТД, с последующим выводом информации на необходимые устройства ее отражения и регистрации. Выходной сигнал МП системы может быть использован для автоматических систем управления режимом работы двигателя.