

Глава 15. Курсовые системы ла
15.1. Состав курсовых систем
Курс является одним из важнейших параметров, знание которого необходимо для решения задач навигации и управления. Для определения курса самолётов была создана самая многочисленная группа курсовых приборов и систем, основанных на различных физических принципах работы. В состав курсовых систем (КСИ) входят различные приборы и системы. В частности: магнитные и индукционные компасы, гироскопические приборы и системы, астрокомпасы, радиокомпасы, доплеровские системы, а также элементы спутниковой навигации.
15.2. Гироскопические приборы, математическая модель, погрешности.
15.2.1. Гироскопические датчики
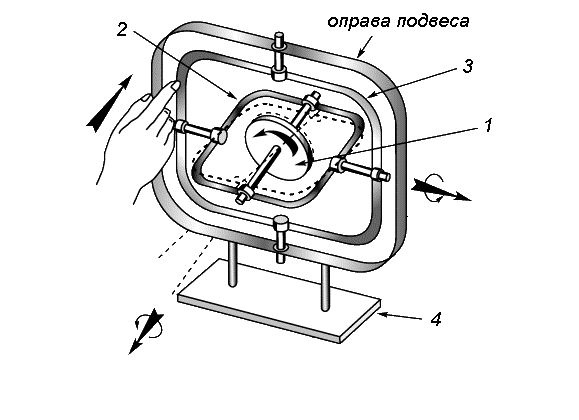
Гироскопом называют вращающееся вокруг оси симметрии с большой угловой скоростью тело вращения (ротор), одна из точек которого неподвижна. Ось z симметрии ротора 1 (рис.15.1) называют осью фигуры или осью ротора гироскопа.
В большинстве гироскопических приборов для обеспечения свободы вращения ротора гироскопа вокруг неподвижной точки применяют карданов подвес, который состоит из двух рамок 2 и 3. Ротор 1 гироскопа с большой угловой скоростью y вращается вокруг оси y1относительно внутренней рамки 2, которая может поворачиваться вокруг оси z относительно рамки 3, а последняя - вокруг оси x относительно неподвижной подставки 4.
Карданов подвес обеспечивает ротору гироскопа свободу вращения относительно трех осей (x, y1 и z). Поэтому гироскоп, установленный в кардановом подвесе, называют гироскопом с тремя степенями свободы. Если центр масс гироскопа совпадает с точкой пресечения осей карданова подвеса, то такой гироскоп называется астатическим.
z
x
y

![]()
![]()

![]()

Рис.15.1. Гироскоп в кардановом подвесе:
1 – ротор гироскопа; 2 – внутренняя рамка гироскопа; 3 – наружная рамка гироскопа;
4 – подставка; y – собственная угловая скорость вращения ротора гироскопа; x - вектор переносной угловой скорости.
Для рассмотрения математической модели гироскопа обратимся к рис.15.2. Положение ротора относительно подставки (оси ) определяется тремя углами , и , которые получаются при последовательных поворотах гироскопа и отклонении его собственных осей x, y и z от осей неподвижного основания.
Согласно рисунку H – кинетический момент гироскопа; Jx и Jy – моменты инерции ротора гироскопа относительно осей x и y.

Рис.15.2. Маховик с тремя степенями свободы – гироскоп
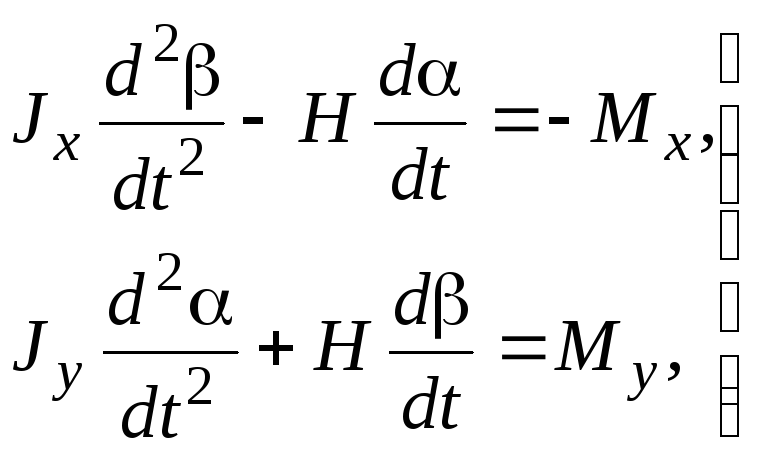
Уравнения движения гироскопа согласно принципу Д’Аламбера имеют вид
 (15.1)
(15.1)
где
![]() и
и ![]() – внешние моменты,
действующие вокруг осей x
и y
(моменты от сил сопротивления трения в
осях корданова подвеса, момент от силы
тяжести, моменты, накладываемые на
гироскоп специальными коррекционными
устройствами и т. д.).
– внешние моменты,
действующие вокруг осей x
и y
(моменты от сил сопротивления трения в
осях корданова подвеса, момент от силы
тяжести, моменты, накладываемые на
гироскоп специальными коррекционными
устройствами и т. д.).
Уравнения (15.1) можно переписать так:
 (15.2)
(15.2)
где
![]() и
и![]() -
полное инерционное сопротивление,
развиваемое гироскопом при действии
на него внешних моментов
-
полное инерционное сопротивление,
развиваемое гироскопом при действии
на него внешних моментов![]() и
и![]() .
.
В теоретической механике при изучении законов движения гироскопа различают свободное и вынужденное движение гироскопа; свободное движение гироскопа, называемое нутацией, представляет собой движение по инерции, когда моменты внешних сил не действуют на гироскоп. Движение гироскопа, нагруженного моментом внешних сил, представляет собой совокупность вынужденного и свободного движения. Вынужденное движение гироскопа называется прецессией.
Закон
нутационного движения можно получить,
приняв в уравнениях (2)
![]() =
=![]() =0.
=0.
Тогда
 (15.3)
(15.3)
Решая систему уравнений (15.3) получаем дифференциальные уравнения, описывающие нутационное движение гироскопа.
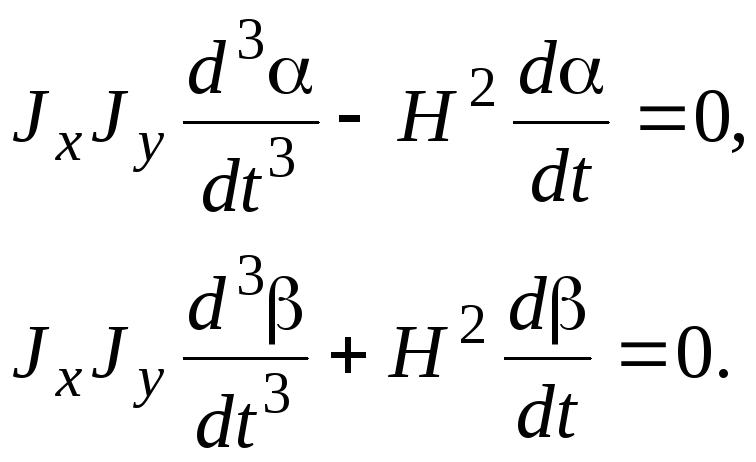 (15.4)
(15.4)
Закон
прецессии гироскопа можно получить из
уравнений (15.2), если пренебречь инерционными
моментами
![]() и
и![]() по сравнению с гироскопическими моментами
по сравнению с гироскопическими моментами![]() и
и![]() .
Тогда имеем
.
Тогда имеем
 (15.5)
(15.5)
Наиболее важными бортовыми гироскопическими приборами являются авиагоризонты, указатели поворота, гирополукомпасы, а также выключатели коррекции.