

лекции по физике / Лекция 3
.doc
3. ИНЕРЦИАЛЬНЫЕ И НЕИНЕРЦИАЛЬНЫЕ ИСТЕМЫ ,
РАБОТА И ЭНЕРГИЯ . ЗАКОН СОХРАНЕНИЯ ЭНЕРГИИ.
3.1. Принцип относительности Галилея.
Любая система отчета, которая движется прямолинейно и равномерно относительно некоторой инерциальной системы отчета, также является инерциальной, т.е. инерциальных систем имеется бесчисленное множество.
Рассмотрим две системы отчета, движущиеся относительно друг друга с постояной скоростью υо .
Пусть
X, Y, Z координаты в неподвижной , а
![]() в движущейся системе. Движется система
прямолинейно и равномерно со скоростью
v0
(рис.3.1.) вдоль оси X.. Через время t
координаты точки А будут:
в движущейся системе. Движется система
прямолинейно и равномерно со скоростью
v0
(рис.3.1.) вдоль оси X.. Через время t
координаты точки А будут:
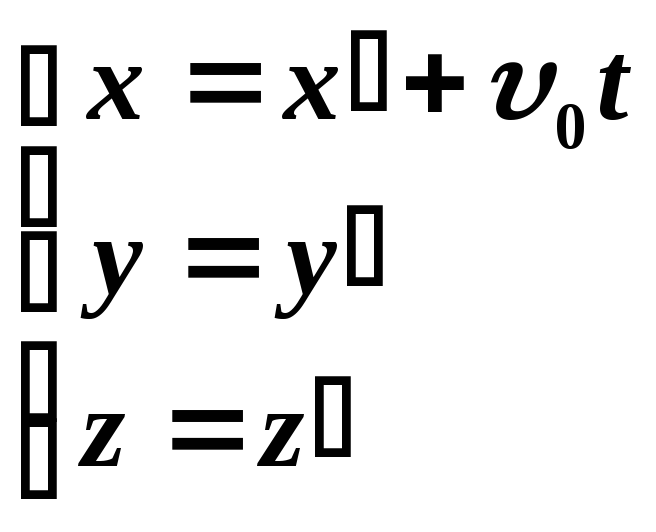 (3.1)
(3.1)
Рис.3.1.
Соотношения (3.1.) называются преобразованиями Галилея. С их помощью осуществляется переход от движущейся системы к неподвижной и наоборот.
Продифференцировав (3.1.) по времени, получим

В векторной форме эти уравнения представляются одним равенством:


 υ
= υ` + υо
(3.2)
υ
= υ` + υо
(3.2)
Это принцип сложения скоростей . В результате дифференцирования по t (3.2.) получим:

 a
= a`
(3.3)
a
= a`
(3.3)
Равенство ускорений показывает, что взаимодействие тел в обеих системах происходит одинаково. Если в системах выполняются законы Ньютона, то такие системы называют инерциальными. Согласно (3.3) система движущаяся прямолинейно и равномерно относительно инерциальной, также инерциальная. Из равенства (3.3) следует и принцип относительности Галилея: ”Никакими механическими опытами, находясь внутри инерциальной системы нельзя установить, находится она в покое или равномерном прямолинейном движении”.
А.Эйнштейн обобщил этот принцип, что и послужило одним из двух постулатов теории относительности.
Системы отсчета, движущиеся с ускорением относительно инерциальных систем, являются неинерциальными. Законы Ньютона выполняются в них только с поправками на, так называемые инерционные силы.
Инерционные силы проявляются в следующих случаях:
а) силы инерции при ускоренном поступательном движении системы отсчета ;
б) силы инерции, действующие на тело, покоящееся во вращающейся системе;
в) силы инерции, действующие на движущиеся тела во вращающейся системе.
В
 первом случае - это обычные силы инерции,
возникающие, например, в транспорте при
торможении и ускорении: Fm
= -ma
. Они направлены всегда противоположно
ускорению системы и не являются
результатом взаимодействия тел. Во
вращающейся системе на тела действуют
инерционные силы, называемые центробежными.
Известно:
FUо
=
. Если тело
движется во вращающейся системе, то
кроме центробежных сил на него действует
сила Кориолиса, вычисляемая по формуле:
первом случае - это обычные силы инерции,
возникающие, например, в транспорте при
торможении и ускорении: Fm
= -ma
. Они направлены всегда противоположно
ускорению системы и не являются
результатом взаимодействия тел. Во
вращающейся системе на тела действуют
инерционные силы, называемые центробежными.
Известно:
FUо
=
. Если тело
движется во вращающейся системе, то
кроме центробежных сил на него действует
сила Кориолиса, вычисляемая по формуле:
Fк = 2mυ`ω
где ω - угловая скорость вращения системы, а υ` - скорость движения тела в системе.
Силы инерции вызываются не взаимодействием тел, а ускоренным движением системы отсчета. поэтому они не подчиняются третьему закону Ньютона. Для любого из тел в инерциальной системе силы инерции являются внешними, т.е. здесь нет замкнутых систем.
3.2. Работа. Кинетическая и потенциальная энергии.
Универсальной мерой различных форм движения и взаимодействия служит физическая величина, называемая энергией. Энергия характеризует систему с точки зрения качественных превращений и количественных изменений движения. Изменение энергии тела является результатом силового взаимодействия тела с другими телами. Для количественной характеристики этого процесса вводится понятие работы силы.
Работой силы F на перемещении dS называется величина, численно равная произведению прекции этой силы FS на направление перемещения на величину самого перемещения.

 Если
сила F
постоянна,
а тело, к которому она приложена, движется
поступательно и прямолинейно, то работа,
совершаемая силой
F,
при прохождении пути S, определяется
формулой:
Если
сила F
постоянна,
а тело, к которому она приложена, движется
поступательно и прямолинейно, то работа,
совершаемая силой
F,
при прохождении пути S, определяется
формулой:
A=FScos = FsS, (3.4)
г
 де
-угол между направлением силы F
и перемещения
S
.
де
-угол между направлением силы F
и перемещения
S
.
 Fs
= Fcos
-
проекция силы F
на направление перемещения. В общем
случае движения тела по криволинейной
траектории под действием переменной
силы
Fs
= Fcos
-
проекция силы F
на направление перемещения. В общем
случае движения тела по криволинейной
траектории под действием переменной
силы
![]() сначала находят элементарную работу
dA на малом перемещении dS, на котором
модуль и направление силы можно считать
неизменными, а траекторию прямолинейной:
сначала находят элементарную работу
dA на малом перемещении dS, на котором
модуль и направление силы можно считать
неизменными, а траекторию прямолинейной:
dA = Fs dS (3.5)
Суммарную
работу А силы на участке траектории от
точки 1 до точки 2 находят интегрированием:
![]()
![]()
Работа - скалярная величина, измеряется в джоулях(Дж). Работу за единицу времени называют мощностью.
N
 = или N
= F
• υ
(3.6)
= или N
= F
• υ
(3.6)
Мощность тоже скаляр. Измеряется в ваттах ( 736 Вт = 1 л.с. )
В
механике различают два вида энергии:
кинетическую и потенциальную. Кинетической
энергией тела называют энергию, измеряемую
работой, которую может совершить
движущееся тело при изменении скорости
от
![]() до
до
![]() .
Элементарная работа силы FS
на пути dS равна :
.
Элементарная работа силы FS
на пути dS равна :
dA
= Fs
∙
dS = m ∙ dS = mυ
∙dυ
![]() ,
отсюда
,
отсюда
A = = – = Wk2 – Wk1 (3.7)
Cогласно (3.7.) работа результирующей силы равна приращению кинетической энергии тела. Для элементарной работы можно записать: dA=dWk
Потенциальная энергия механической системы, это энергия, которая зависит только от взаимного расположения взаимодействующих частей системы и от их положения во внешнем силовом поле. Под силовым полем понимается пространство, в каждой точке которого на тело действует определенная сила. В частном случае это силы, действующие на тело, поднятое над Землей. Если силовое поле не зависит от времени, а при движении в нем тела по замкнутому пути, работа сил поля равна нулю, т.е. работа в таком поле зависит лишь от начального и конечного положений точек перемещения, то такие поля называют потенциальными, а действующие в них силы консервативными.
Консервативные силы характеризуются отсутствием перехода энергии в другие немеханические виды. Если же работа зависит от траектории, то силы диссипативные (например, сила трения). При этом механическая энергия переходит частично в теплоту.
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией. Работа консервативных сил при элементарном изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, т.к. работа совершается за счет убыли потенциальной энергии:
dA = - dWп (3.8)
Найдем связь потенциальной энергии и силы. Известно ,
FsdS= -dWп или Fs = , отсюда
F = -gradWп (3.9)
т.е. сила равна градиенту потенциальной энергии со знаком минус. Соотношение (3.9) записано в векторном виде, при этом:
g

 radWп
= i + j + k
radWп
= i + j + k
где
![]() -
единичные векторы координатных осей,
а сам вектор называется градиентом
скаляра
-
единичные векторы координатных осей,
а сам вектор называется градиентом
скаляра
![]() .
Для выражения
.
Для выражения
![]() применяется обозначение
применяется обозначение
![]() .
Это символический вектор, его называют
оператором Гамильтона или набла-оператором:
.
Это символический вектор, его называют
оператором Гамильтона или набла-оператором:
=



 i + j + k
(3.10)
i + j + k
(3.10)
П оэтому
(3.9) может иметь вид: F
= - Wп
(3.11)
оэтому
(3.9) может иметь вид: F
= - Wп
(3.11)
Известно, что с помощью формулы работы можно вычислить
потенциальную
энергию массы m в поле Земли на высотах
![]() и
и
![]() :
:
Wп = mgh2 – mgh1 (3.12)
Потенциальная энергия определяется и другой формулой (3.12). Например, потенциальная энергия сжатой пружины
Wп = (3.13)
Действительно, из формул F= -kx., dA=Fdx, найдем
dA=dWп = -kxdx. Интегрируя последнее, получим (3.13).
3.3. Закон сохранения энергии в механике.
Полной механической энергией системы называют величину W, равную сумме кинетической и потенциальной энергий этой системы:
W = Wп + Wк
Полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остается постоянной (закон сохранения энергии в механике).
Для
доказательства закона сохранения
механической энергии рассмотрим систему
материальных точек
![]() движущихся со скоростями
движущихся со скоростями
![]() Запишем по второму закону Ньютона
уравнения для каждой точки, как и в
случае доказательства закона сохранения
импульса:
Запишем по второму закону Ньютона
уравнения для каждой точки, как и в
случае доказательства закона сохранения
импульса:
m



 1=
(F1-2
+
F1-3
+ F1-n)
+ F1*
1=
(F1-2
+
F1-3
+ F1-n)
+ F1*
... ... ... ... ... ... ... ...
m



 n=
(Fn-1
+
Fn-2
+ Fn(n-1))
+ Fn*
n=
(Fn-1
+
Fn-2
+ Fn(n-1))
+ Fn*



F1, F2 ......Fn - это внешние неконсервативные силы, кроме того в скобках, в отличие от доказательства закона сохранения импульса, могут быть не только консервативные внутренние силы, но и внешние консервативные, т.е. сумма в скобках не равна нулю.

 Каждое
из уравнений умножим на υ1dt
= dr
и, сложив все равенства почленно, получим:
Каждое
из уравнений умножим на υ1dt
= dr
и, сложив все равенства почленно, получим:
![]()
Если внешние консервативные силы отсутствуют, то с учетом, что
![]() ,
а второй член
,
а второй член
![]() равен убыли потенциальной энергии -
равен убыли потенциальной энергии -![]() ,
можно записать
,
можно записать
dWк + dWп = 0 или d(Wк + Wп) = 0, откуда
Wк + Wп = const
Таким образом, доказали, что полная механическая энергия системы сохраняется постоянной. Из доказательства следует, что это закон для систем, где действуют только консервативные силы.