

|
|
|
|
|
|
|
|
Таблица |
|
|
|
|
|
|
|
|
|
|
|
Вариант |
|
|
|
Параметр |
|
|
|
||
a |
b |
c |
T1 |
T2 |
T3 |
U |
ω |
||
|
|||||||||
1 |
0,5 |
1 |
1 |
0,01 |
0,001 |
0,01 |
2 |
100 |
|
2 |
0,2 |
1,5 |
1 |
0,001 |
0,02 |
0,01 |
3 |
10 |
|
3 |
0,4 |
0,5 |
2 |
0,2 |
0,05 |
0,002 |
0,5 |
1 |
|
4 |
0,05 |
0,1 |
2 |
0,008 |
0,008 |
0,01 |
8 |
50 |
|
5 |
1 |
2 |
2 |
0,03 |
0,001 |
0,01 |
4 |
150 |
|
6 |
1 |
1,3 |
3 |
0,005 |
0,1 |
0,009 |
5 |
80 |
|
7 |
0,5 |
0,8 |
3 |
0,04 |
0,02 |
0,1 |
0,8 |
5 |
|
8 |
0,2 |
1 |
1 |
0,1 |
0,004 |
0,02 |
3,5 |
200 |
|
9 |
0,3 |
1 |
1 |
0,009 |
0,001 |
0,05 |
10 |
90 |
|
10 |
1 |
2 |
2 |
0,002 |
0,3 |
0,01 |
1 |
10 |
|
4.3. Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
4.ЛАХ для линейной части системы.
5.Значения амплитуды вибрации и траектории движения выходной переменной для каждой исследуемой нелинейности и системы без учета нелинейности.
7.Выводы.
5.4.Контрольные вопросы
1.Для каких систем применим метод вибрационной линеаризации?
2.Какую форму должно иметь вибрационное воздействие?
3.Где на практике применяется данный метод линеаризации:
4.Какие ограничения накладываются на вибрационное воздействие?
5.Для каких нелинейностей применима вибрационная линеаризация?
ЛАБОРАТОРНАЯ РАБОТА № 5: ИССЛЕДОВАНИЕ ФАЗОВЫХ ТРАЕКТОРИЙ РЕЛЕЙНОЙ СИСТЕМЫ
Цель работы: исследование фазовых траекторий релейных систем с различными типами релейных характеристик.
5.1. Общие сведения
Релейные системы автоматического управления относятся к классу систем дискретного действия, поскольку выходная величина релейного элемента представляет собой дискретный сигнал и изменяется во времени скачками.
15
Преобразование релейным элементом непрерывного входного сигнала в дискретный называется квантованием по уровню.
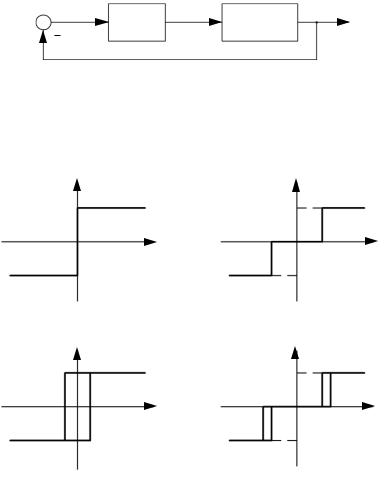
Большинство релейных систем автоматического управления имеют структуру, приведенную на рис. 5.1. Однако возможны и более сложные системы автоматического управления, содержащие несколько релейных элементов, разделенных частями непрерывного действия.
z |
(z) |
y |
x |
|
|
Wл(p) |
Рис. 5.1. Релейная система автоматического управления
Релейный элемент – это звено релейного действия, статическая характеристика которого может иметь вид одной из характеристик, приведенных на рис. 5.2. Кроме того, релейная характеристика может быть несимметричной.
|
z |
|
|
z |
|
с |
|
с |
|
|
|
x |
–a |
x |
|
|
|
|
a |
|
–с |
|
|
–с |
|
а |
|
|
б |
|
z |
|
|
z |
с |
|
|
с |
|
–a |
a |
x |
–b –a |
x |
|
|
|
|
a b |
|
–с |
|
|
–с |
|
в |
|
|
г |
Рис. 5.2. Статические характеристики релейных элементов: а – двухпозиционное реле; б – трехпозиционное реле; в – гистерезис; г – трехпозиционное реле с гистерезисом
Релейной характеристикой могут обладать такие элементы системы автоматического управления как: реле (электрическое, пневматическое и т. д.), двигатель постоянной скорости (управляемый только командами «включен», «выключен» и, возможно, «реверс»), чувствительное звено релейного действия, полупроводниковые ключи с двумя устойчивыми режимами и др. При этом функционально элемент системы управления с релейной характеристикой может быть как звеном управляющего устройства – чувствительным, усилительным, исполнительным –, так и входить в состав объекта управле-
16
ния. Основное применение в релейных системах получили двух- и трехпозиционные релейные элементы, как с гистерезисом, так и без гистерезиса.
Звенья с релейными характеристиками часто применяются при проектировании автопилотов самолетов, систем управления космическими объектами, авторулевых судов и т. д. Кроме того, релейными характеристиками обладают многие современные системы управления электрическими машинами, в которых питание осуществляется от полупроводниковых преобразователей электрической энергии. Основными достоинствами релейных систем автоматического управления являются их простота, связанная с ней высокая надежность, а также экономичность в расходе энергии питания. При этом релейные системы позволяют осуществлять максимальное быстродействие.
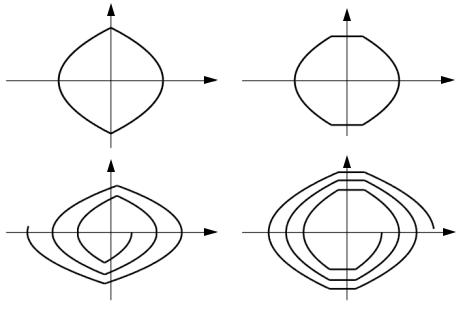
В работе исследуется влияние релейных элементов с различной характеристикой на фазовые траектории и динамику системы автоматического управления. Возможный вид фазовых траекторий системы (см. рис. 5.1) с объектом управления второго порядка приведен на рис. 5.3.
y |
y |
|
|
x |
x |
|
|
|
|
а |
|
б |
|
|
|||
y |
y |
||
|
|
||
|
x |
|
x |
в |
г |
Рис. 5.3. Фазовые траектории системы второго порядка с: а – двухпозиционным реле; б – трехпозиционным реле; в – гистерезисом; г – трехпозиционным реле с гистерезисом
Для релейных систем характерны некоторые особенности динамики. Так, например, в системах с двухпозиционным релейным элементом с одной стороны отсутствует статический режим, с другой стороны существует возможность получения эффекта вибрационной линеаризации. В системах с трехпозиционным реле благодаря наличию зоны нечувствительности принципиально возможен режим покоя без автоколебаний.
17
Как видно из рис. 5.3, вид фазовых траекторий системы зависит от типа релейного элемента. Двухпозиционному реле и трехпозиционному реле соответствует замкнутая траектория. В случае появления гистерезиса изображающая точка бесконечно удаляется от начала координат, что говорит о неустойчивости положения равновесия.
5.2.Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model
2.Во вкладке Configuration Parameters/Solver задать следующие настройки расчета переходных процессов: type – fixed step; step size – 1e–4.
3.Собрать четыре расчетные схемы, соответствующие структурной схеме, приведенной на рис. 5.1, согласно варианту из таблицы вариантов, с каждым из нелинейных элементов, приведенном на рис. 5.2.
4.Исследовать движение фазовых координат во времени посредством моделирования процессов в системе при отклонении системы от состояния равновесия. Для этого в окне Function Block Parametrs выходного интегратора задать начальное значение: Initial condition, равное единице.
5.Представить результаты исследования схем в виде графиков движения выходной координаты и ее производной во времени и фазовые траектории систем.
|
|
|
|
|
Таблица |
|
|
|
|
|
|
|
|
Вари- |
|
Тип релейного звена (z) |
|
|
||
Двухпози- |
Трехпозици- |
|
Трехпозиционное |
Wл(p) |
||
ант |
Гистерезис |
|||||
ционное |
онное |
с гистерезисом |
|
|||
|
|
|
||||
1 |
c=1 |
c=1, a=0.4 |
c=1, a=0.3 |
c=1, a=0.3, b=0.5 |
1/p2 |
|
2 |
c=1 |
c=1, a=0.4 |
c=1, a=0.3 |
c=1, a=0.2, b=0.5 |
5/p2 |
|
3 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
5/p2 |
|
4 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
10/p2 |
|
5 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
10/p2 |
|
6 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
5/(p2+p) |
|
7 |
c=1 |
c=1, a=0.5 |
c=1, a=0.1 |
c=1, a=0.3, b=0.5 |
5/(p2+p) |
|
8 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
5/(0.1p2+p) |
|
9 |
c=1 |
c=1, a=0.5 |
c=1, a=0.1 |
c=1, a=0.3, b=0.5 |
1/(0.1p2+p) |
|
10 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
1/(2p2+p) |
|
5.3. Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
18